

【STM32学习笔记】二:Cube MX、HAL库——定时器中断、PWM输出、电机控制
定时器是单片机学习的重中之重,不论计时、计数、PWM生成、中断等等,都离不开定时器。定时器是什么就不在这里展开赘述了,可以在本站查阅到大量相关资料。本文着重对使用CubeMX进行定时器配置,定时器中断、PWM频率、占空比配置及如何利用PWM方波驱动电机进行讲解。功能:开启定时器PWM产生。实例:HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3);功能:启动定时器中断。实
系列文章目录
【STM32学习笔记】一:基础时钟配置、GPIO输入输出、点亮LED
文章目录
前言
定时器是单片机学习的重中之重,不论计时、计数、PWM生成、中断等等,都离不开定时器。定时器是什么就不在这里展开赘述了,可以在本站查阅到大量相关资料。本文着重对使用CubeMX进行定时器配置,定时器中断、PWM频率、占空比配置及如何利用PWM方波驱动电机进行讲解。
一、前期准备
本文以STM32F412RET6芯片为例。首先查阅开发板手册或原理图,找到可以生成PWM的相应引脚。
二、定时器相关函数介绍
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel);
功能:开启定时器PWM产生。
实例:HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3);
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim);
功能:启动定时器中断。
实例:HAL_TIM_Base_Start_IT(&htim1);
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
功能:定时器中断回调函数。定时器中断触发后会进入该函数执行。
实例:void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
{
if(htim == &htim1) //判断中断是否来自于定时器1
{
HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_2);
}
}
三、PWM输出配置
3.1 时钟配置

样例工程仍然基于第一章内容。首先配置RCC,高速时钟选择外部时钟。具体方法参考第一章中时钟配置过程:【STM32学习笔记】Cube MX、HAL库——基础时钟配置、GPIO输入输出、点亮LED-CSDN博客
3.2 定时器配置
1)引脚选择
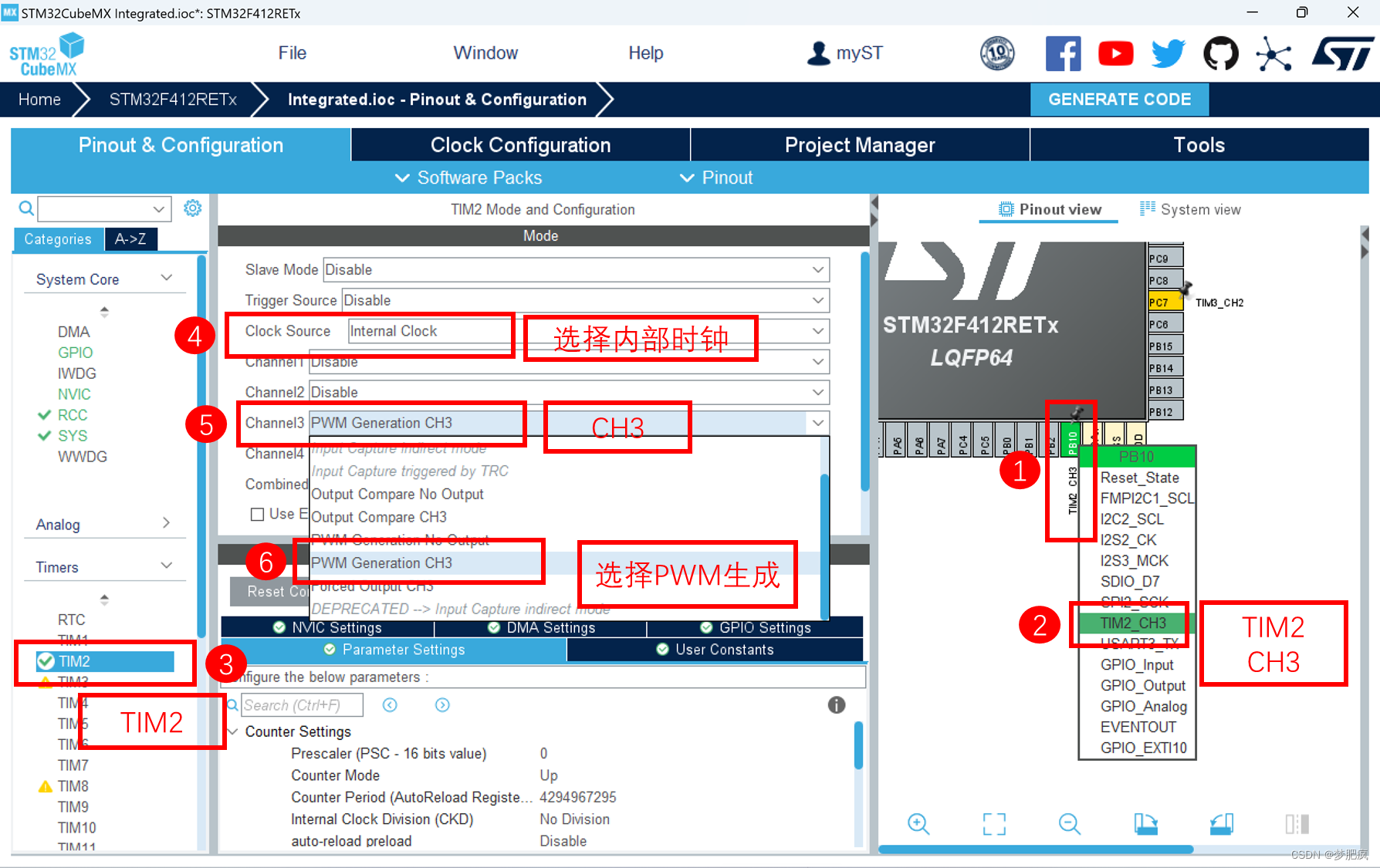
查阅自己开发板原理图,找到可以生成PWM信号的引脚。这里我使用了PB10和PC7,图中以PB10一个引脚为例。
2)参数设置
3)PWM频率计算方式
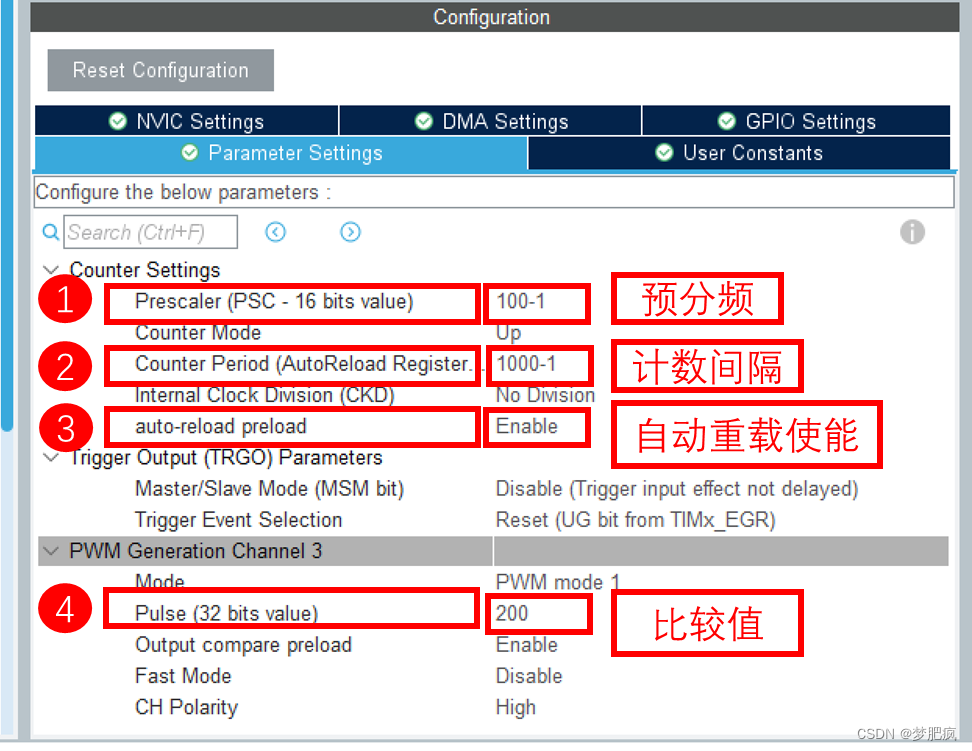
例如:配置10kHz的PWM频率。要通过配置预分频和计数周期来计算这个频率。
之前配置的内部时钟周期配置的是100MHz,而我们要1kHz,那么Prescaler设置成(100-1),Counter Period设置为(1000-1)。设置的这两个数字可以根据实际需求来凑即可,只要算出来是1khz即可。
计算公式: 频率(f) 时间(T) 预分频(Prescaler) 计数周期(Counter Period) f = timer_clock / (Prescaler+1) / (Counter_Period+1) //timer在计算的时候会自动将值+1 计算如下: Prescaler = 100-1 Counter_Period = 1000-1 f = 100MHz / (100-1+1) / (1000-1+1) = 1000Hz T = 1/1000 = 1ms 占空比计算: 占空比(Duty Cycle) 比较脉冲值(Pulse) Duty Cycle = Pulse / (Counter Period+1) 占空比 = 200 / (1000-1+1) = 0.2
因此,根据图1中参数设定,则会生成频率1kHz、占空比20%的PWM信号。
Keil代码
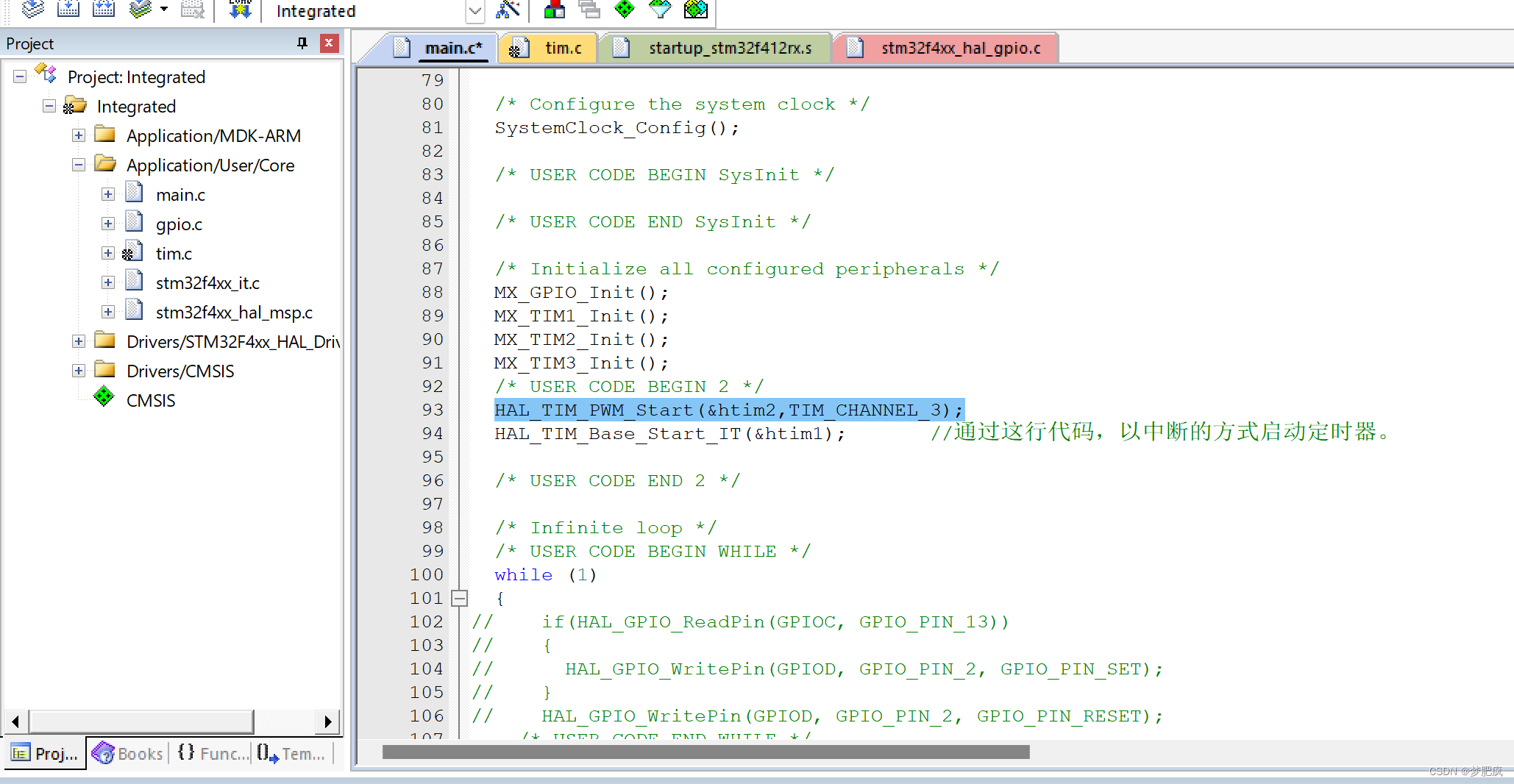
在上图所示位置加入下面代码,即可实现PB10引脚上产生 PWM信号。
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3);使用下文代码使 PB10引脚停止产生PWM信号。
HAL_TIM_PWM_Stop(&htim2,TIM_CHANNEL_3);四、定时器中断配置
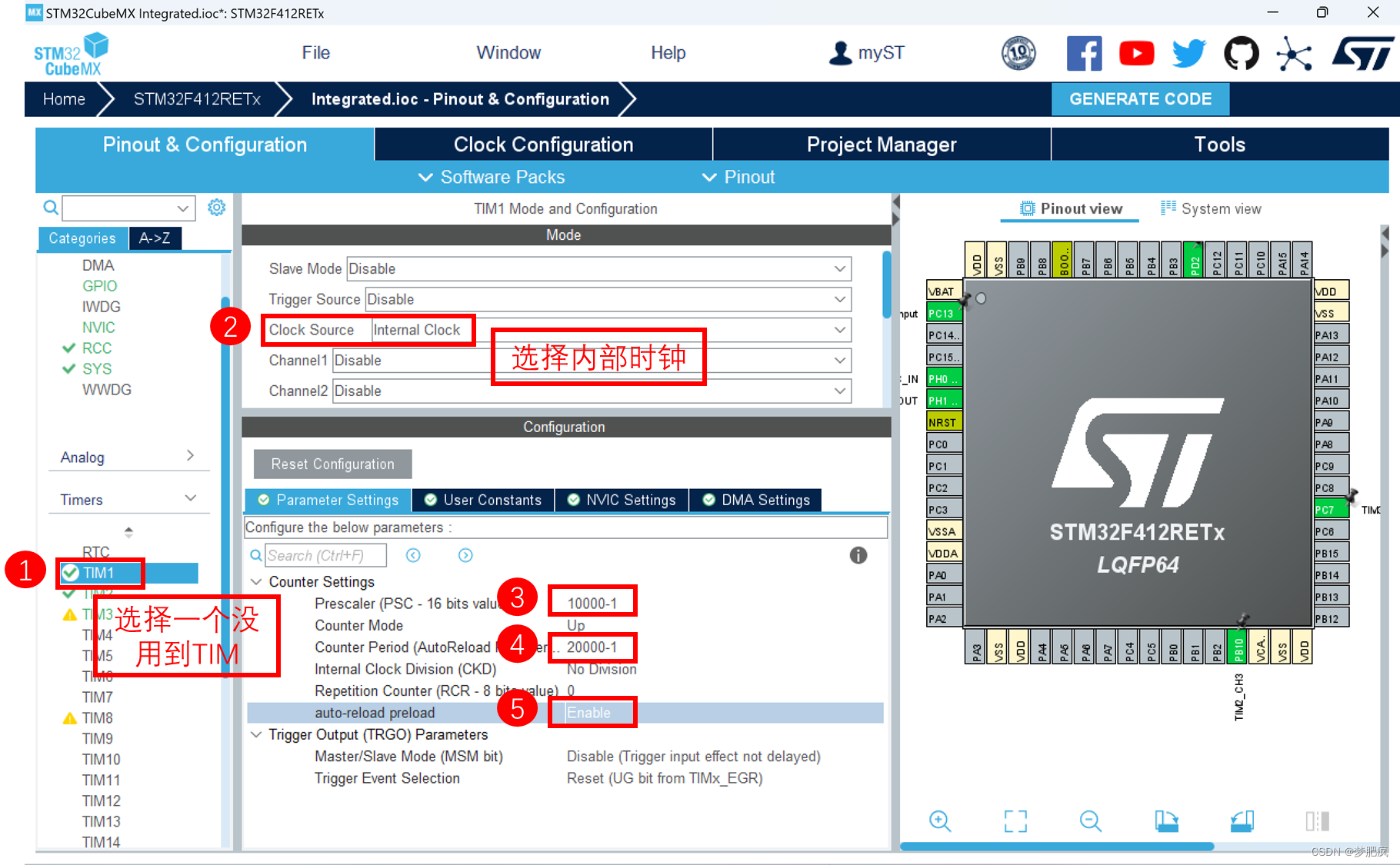
仍然基于前面的工程文件,选择一个没有用到的TIM,这里选择了TIM1,时钟选择内部时钟,参数设置同上面PWM频率配置。如图2参数配置后,定时器中断间隔为100 000000 / 10000 / 20000 = 0.5Hz,即周期2s。
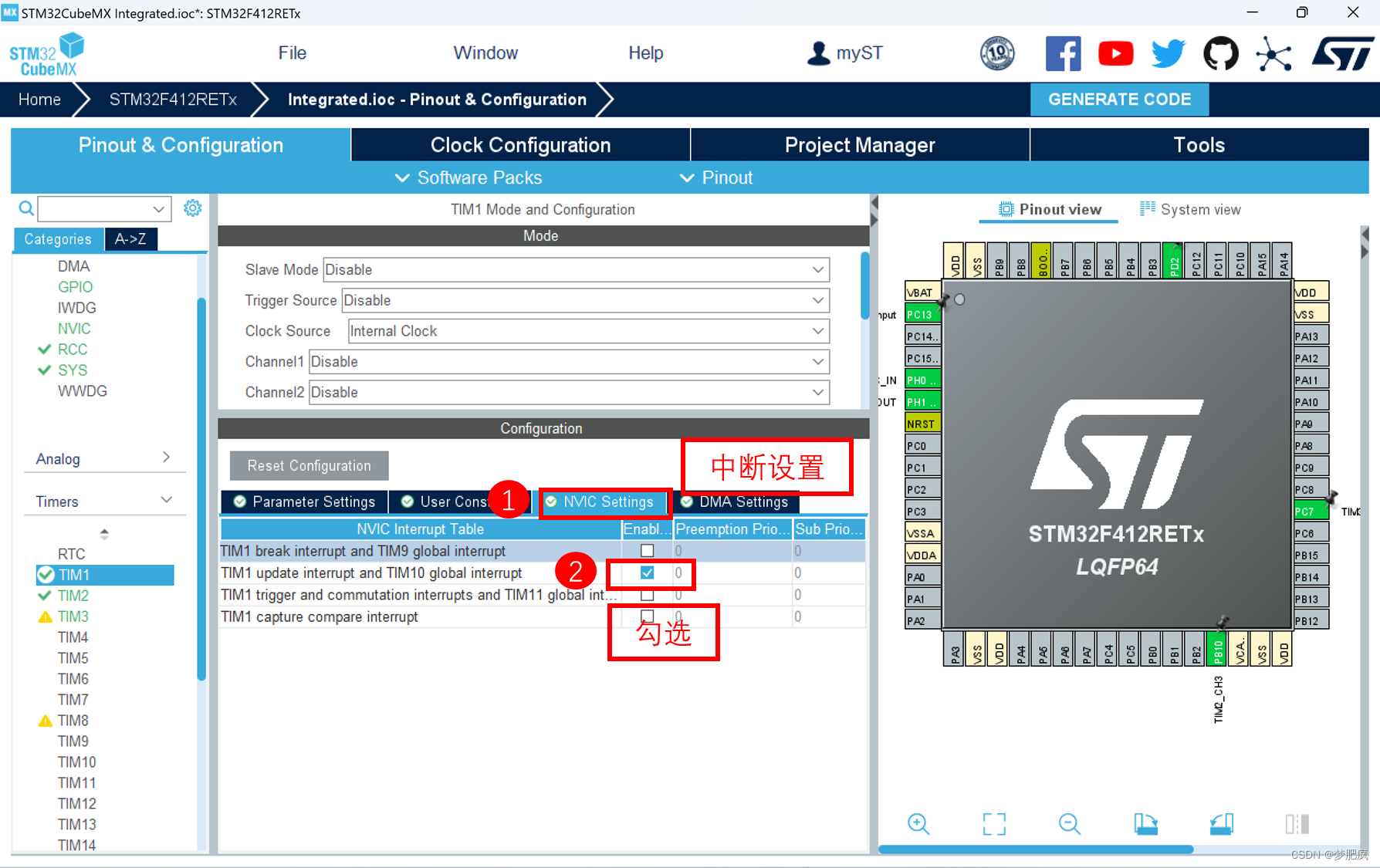
在中断设置中使能中断。
Keil代码
1)定时器中断启动
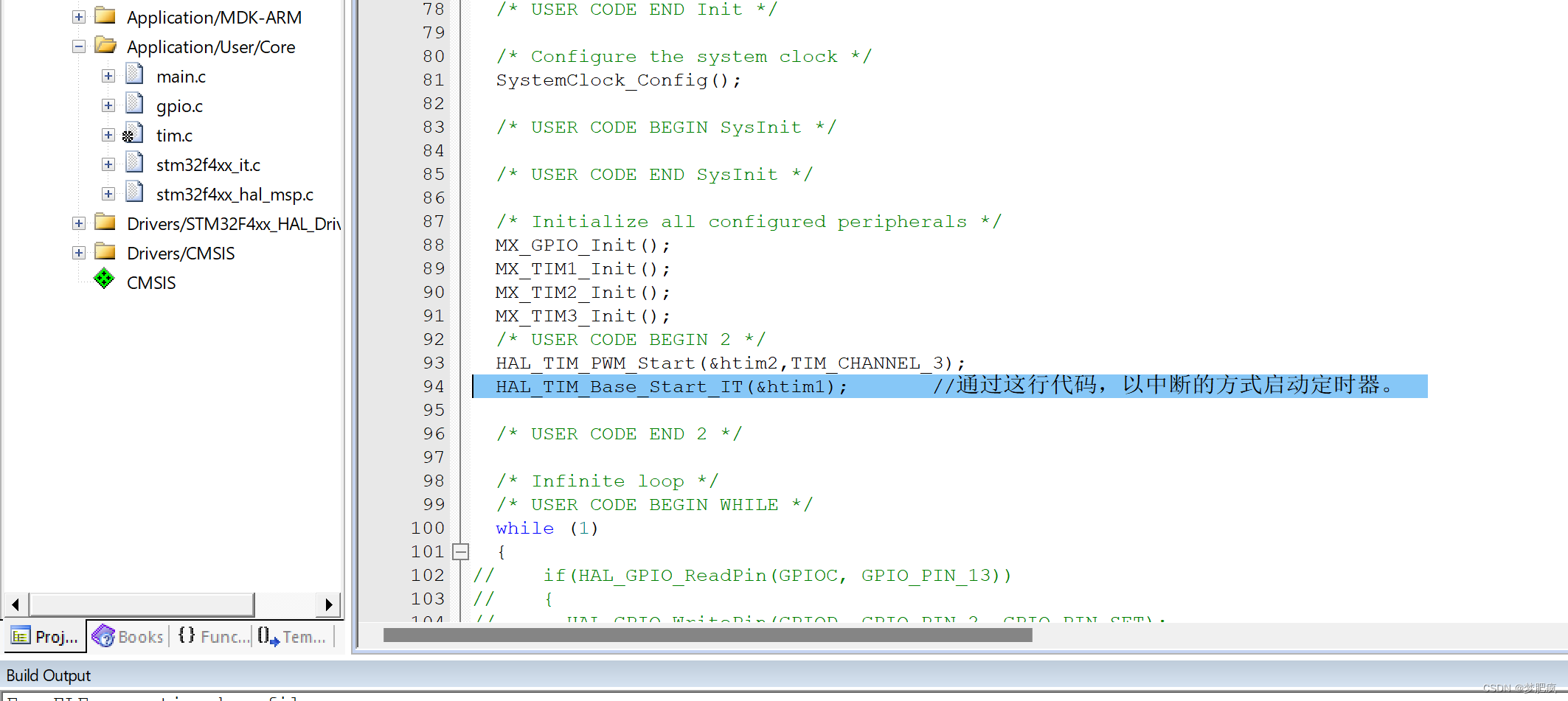
在上图所示位置加入下面代码,即可启动定时器中断。
HAL_TIM_Base_Start_IT(&htim1); 2)中断回调函数
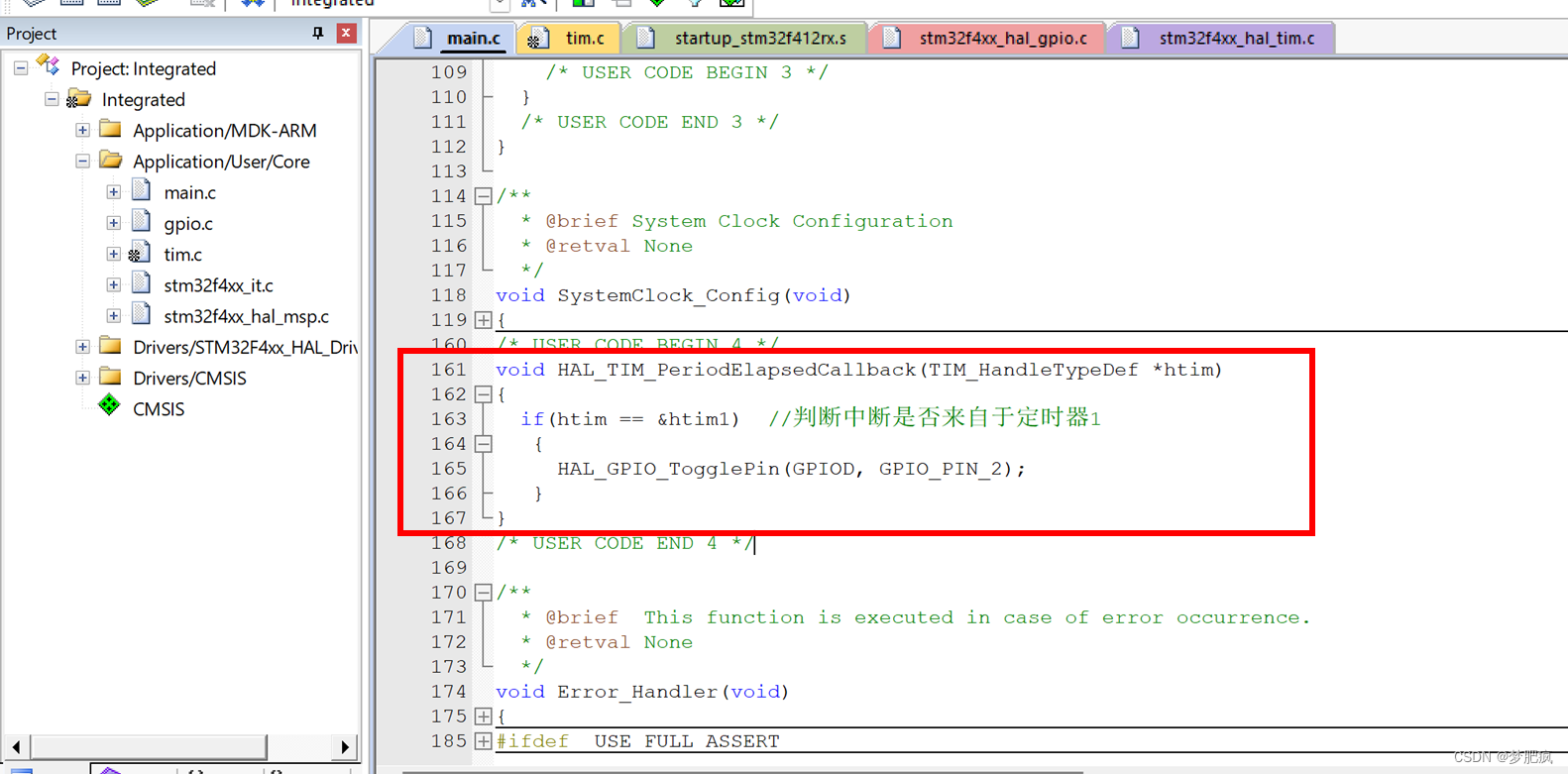
在图示位置加入下面中断回调函数,每当定时器触发中断后,就会到该函数内执行函数内容。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
//中断发生后会进入当前函数
if(htim == &htim1) //判断中断是否来自于定时器1
{
HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_2); //引脚电平反转
}
}五、电机控制
通常利用PWM信号占空比控制电机转速,通过调节PWM信号的占空比,可以改变电机接收到的平均电压。当占空比增加时,电机平均电压也增加,导致电机转速增加。反之,当占空比减小时,电机平均电压减小,电机转速减小。
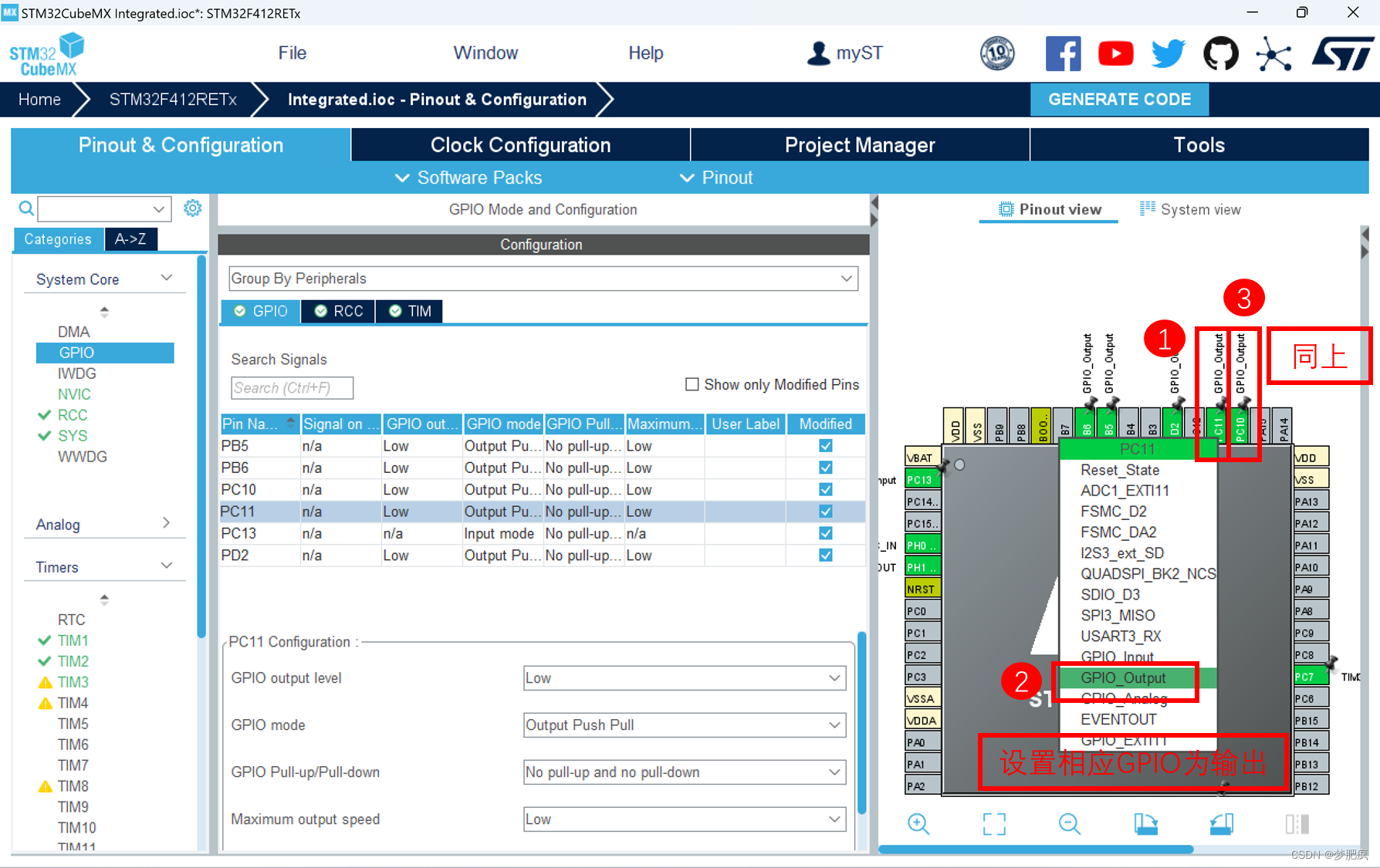
查看开发板原理图,确认开发板有没有可直接驱动电机的外设。如H桥、电机控制IC等,不论什么外设,确认其有无使能端。我所使用的开发板上集成了两路H桥,它需要两路IO输出控制其电流输出方向。在这里我使用了PC10和PC11引脚,通过在代码中变换两路IO的状态实现电机转向的控制。
Keil测试代码
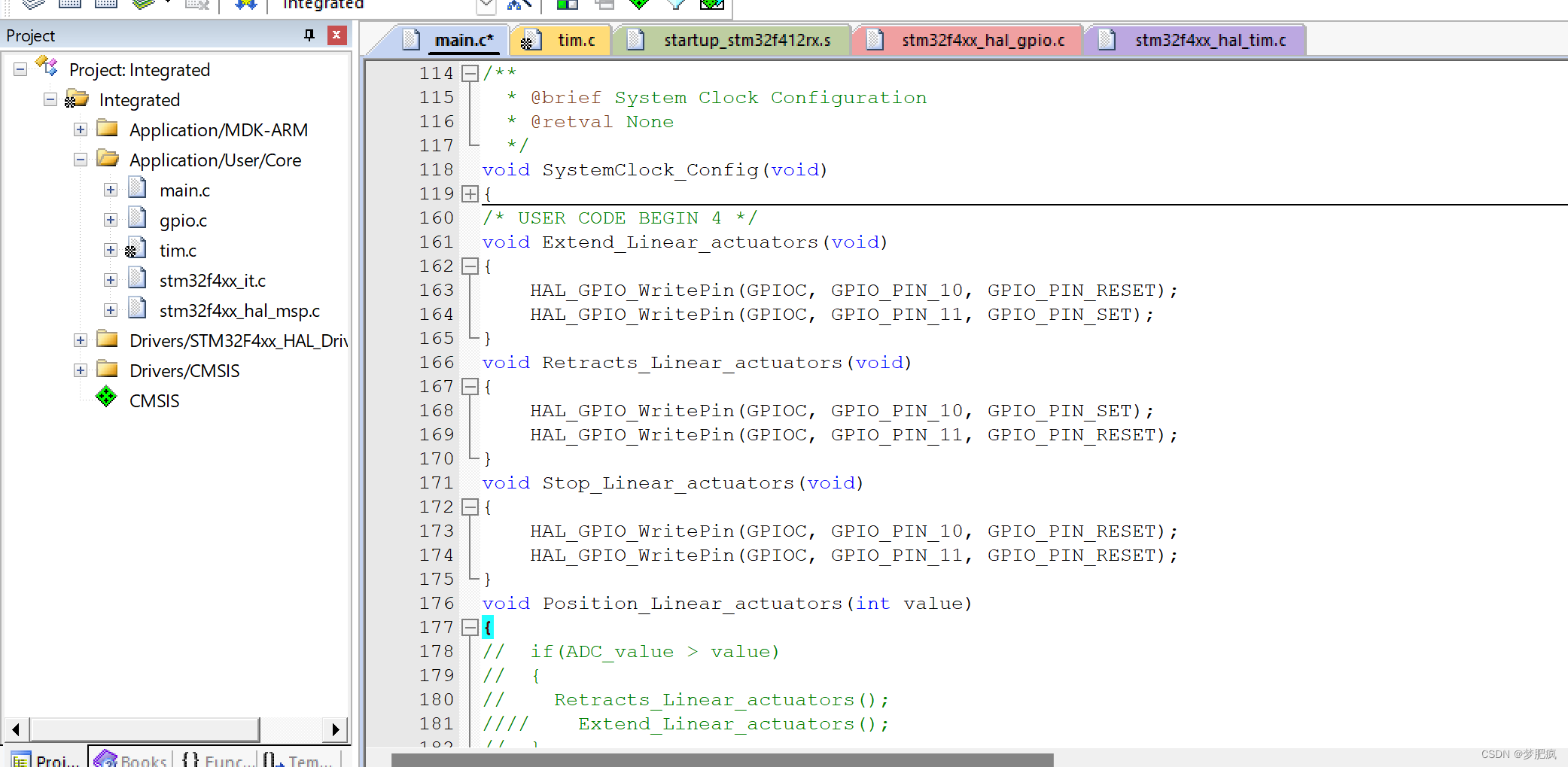
void Extend_Linear_actuators(void) //电推杆伸出
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_10, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_11, GPIO_PIN_SET);
}
void Retracts_Linear_actuators(void) //电推杆退回
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_10, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_11, GPIO_PIN_RESET);
}
void Stop_Linear_actuators(void) //电推杆停止
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_10, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_11, GPIO_PIN_RESET);
}

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)