
简单控制知识了解(pid+简单滑模)
滑模控制一、PID控制PID(proportion integration differentiation)其实就是指比例,积分,微分控制,指用误差信号控制被控量控制算法公式:u(t)=kp(err(t)+1T1∫01err(t) dx+TDderr(t)dt)u(t)=k_p(err(t)+\frac{1}{T_1}\int_0^1 {err(t)} \,{\rm d}x+\frac{T_D d
一、PID控制
PID(proportion integration differentiation)其实就是指比例,积分,微分控制,指用误差信号控制被控量

控制算法公式:
u
(
t
)
=
k
p
(
e
r
r
(
t
)
+
1
T
1
∫
0
1
e
r
r
(
t
)
d
x
+
T
D
d
e
r
r
(
t
)
d
t
)
u(t)=k_p(err(t)+\frac{1}{T_1}\int_0^1 {err(t)} \,{\rm d}x+\frac{T_D derr(t)}{dt})
u(t)=kp(err(t)+T11∫01err(t)dx+dtTDderr(t))
离散形式:
u
(
k
)
=
k
p
(
e
(
k
)
+
T
T
1
∑
n
=
0
k
e
(
k
)
+
T
D
T
(
e
(
k
)
−
e
(
k
−
1
)
)
u(k)=k_p(e(k)+\frac{T}{T_1} \sum_{n=0}^k e(k)+\frac{T_D}{T}(e(k)-e(k-1))
u(k)=kp(e(k)+T1Tn=0∑ke(k)+TTD(e(k)−e(k−1))
输入:例如电机转速的预定值
输出:电机的转速的实际值
误差:输入-输出
比例项:误差乘比例系数,叠加到输入中,从而控制系统的输出,存在稳态误差(例:小车在接近终点时,误差较小,输入较小,不足以抵抗外界(例如摩擦力)影响,小车在接近终点时静止了,即稳态误差)
积分项:对误差积分(累加),增大输入,以消除稳态误差
微分项:负数项(误差必然越来越小),当误差极具减小,输入应当放缓。能够减小震荡。
二、PID控制算法实现
1.位置式PID
控制算法公式:
u
(
k
)
=
k
p
e
(
k
)
+
k
i
∑
n
=
0
k
e
(
k
)
+
k
d
(
e
(
k
)
−
e
(
k
−
1
)
)
u(k)=k_pe(k)+k_i \sum_{n=0}^k e(k)+k_d(e(k)-e(k-1))
u(k)=kpe(k)+kin=0∑ke(k)+kd(e(k)−e(k−1))
#include<iostream>
using namespace std;
class PID
{
public:
PID();
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_last; //定义上一个偏差值
float Kp, Ki, Kd; //定义比例、积分、微分系数
float voltage; //定义电压值(控制执行器的变量)
float integral; //定义积分值
};
PID::PID()//构造函数初始化
{
SetSpeed=0.0;
ActualSpeed=0.0;
err=0.0;
err_last=0.0;
Kp = 0.2;
Ki = 0.015;
Kd = 0.2;
integral = 0.0;
}
float PID_realize(PID &pid, float speed) {
pid.SetSpeed = speed;
pid.err = pid.SetSpeed - pid.ActualSpeed;
pid.integral += pid.err;
pid.voltage = pid.Kp * pid.err + pid.Ki * pid.integral + pid.Kd * (pid.err - pid.err_last);
pid.err_last = pid.err;
pid.ActualSpeed = pid.voltage * 1.0;
return pid.ActualSpeed;
}
int main() {
printf("System begin \n");
PID pid;
int count = 0;
while (count < 1000)
{
float speed = PID_realize(pid,200.0);
printf("%f\n", speed);
count++;
}
return 0;
}
2.增量式PID
控制算法公式:
△
u
(
k
)
=
u
(
k
)
−
u
(
k
−
1
)
△u(k)=u(k)-u(k-1)
△u(k)=u(k)−u(k−1)
△
u
(
k
)
=
k
p
(
e
(
k
)
−
e
(
k
−
1
)
)
+
k
i
e
(
k
)
+
k
d
(
e
(
k
)
−
2
e
(
k
−
1
)
+
e
(
k
−
2
)
)
△u(k)=k_p(e(k)-e(k-1))+k_ie(k)+k_d(e(k)-2e(k-1)+e(k-2))
△u(k)=kp(e(k)−e(k−1))+kie(k)+kd(e(k)−2e(k−1)+e(k−2))
参数确定的情况下,只和最近三次的偏差有关,与位置式相比,增量式计算量小很多
#include<iostream>
using namespace std;
class PID
{
public:
PID();
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_next; //定义上一个偏差值
float err_last; //定义最上前的偏差值
float Kp, Ki, Kd; //定义比例、积分、微分系数
};
PID::PID()//构造函数初始化
{
SetSpeed=0.0;
ActualSpeed=0.0;
err=0.0;
err_last=0.0;
err_next = 0.0;
Kp = 0.2;
Ki = 0.015;
Kd = 0.2;
}
float PID_realize(PID &pid, float speed)
{
pid.SetSpeed = speed;
pid.err = pid.SetSpeed - pid.ActualSpeed;
float incrementSpeed=pid.Kp*(pid.err-pid.err_next)+pid.Ki*pid.err+pid.Kd*(pid.err-2*pid.err_next+pid.err_last);
pid.err_last = pid.err_next;
pid.err_next = pid.err;
pid.ActualSpeed += incrementSpeed;
return pid.ActualSpeed;
}
int main() {
printf("System begin \n");
PID pid;
int count = 0;
while (count < 1000)
{
float speed = PID_realize(pid,200.0);
printf("%f\n", speed);
count++;
}
return 0;
}
二、简单的滑模控制
1.系统描述
负载通过电机控制输入u来控制,动态模型如下:
J
θ
¨
=
u
+
d
(
t
)
J \ddot{\theta}=u+d(t)
Jθ¨=u+d(t)
其中
θ
(
t
)
\theta(t)
θ(t)是角位置;
J
>
0
J>0
J>0为转动惯量;
d
(
t
)
d(t)
d(t)为干扰项且满足
∣
d
(
t
)
∣
≤
η
|d(t)| \leq \eta
∣d(t)∣≤η;
η
\eta
η为干扰上界。取位置指令为常数值
θ
d
(
t
)
\theta_d(t)
θd(t),
e
r
r
=
θ
−
θ
d
err=\theta-\theta_d
err=θ−θd为跟踪误差
1.滑模控制律设计
控制的目的是在
u
(
t
)
u(t)
u(t)输出下,使得
e
r
r
=
0
,
e
r
r
˙
=
0
err=0,\dot{err}=0
err=0,err˙=0,定义跟踪误差函数s为
s
=
c
e
r
r
+
e
r
r
˙
,
c
>
0
s=cerr+\dot{err},c>0
s=cerr+err˙,c>0
若
s
=
0
s=0
s=0,解微分方程
c
e
r
r
+
e
r
r
˙
=
0
⟹
{
e
r
r
˙
=
−
c
e
r
r
˙
(
0
)
e
−
c
t
,
e
r
r
=
e
r
r
(
0
)
e
−
c
t
,
cerr+\dot{err}=0\implies\begin{cases} \dot{err}=-c \dot{err}(0)e^{-ct}, \\ err= err(0)e^{-ct}, \end{cases}
cerr+err˙=0⟹{err˙=−cerr˙(0)e−ct,err=err(0)e−ct,
状态量会以指数速度最终趋于0,s=0即滑模面。在方程
s
=
c
e
r
r
+
e
r
r
˙
,
c
>
0
s=cerr+\dot{err},c>0
s=cerr+err˙,c>0中引入u,对其求导得(输入为阶跃响应的情况下)
s
˙
=
c
(
θ
˙
−
θ
d
˙
)
+
θ
¨
−
θ
d
¨
=
c
θ
˙
+
1
J
(
u
+
d
(
t
)
)
,
c
>
0
\dot{s}=c(\dot{\theta}-\dot{\theta_d})+\ddot{\theta}-\ddot{\theta_d}=c\dot{\theta}+\frac{1}{J}(u+d(t)),c>0
s˙=c(θ˙−θd˙)+θ¨−θd¨=cθ˙+J1(u+d(t)),c>0
对于关于s的状态方程,如何保证s=0(即s=0是平衡点,满足渐近稳定性),根据Lyapunov稳定判定的第二方法,如果存在一个连续函数V满足
(
1
)
(1)
(1)
V
(
0
)
=
0
V(0)=0
V(0)=0
(
2
)
(2)
(2)
V
(
x
)
>
0
V(x)>0
V(x)>0
x
!
=
0
x!=0
x!=0
(
3
)
(3)
(3)
V
˙
(
x
)
<
0
\dot{V}(x)<0
V˙(x)<0
x
!
=
0
x!=0
x!=0
那么系统将在平衡点
s
=
0
s=0
s=0 稳定,即
lim
t
→
∞
s
(
t
)
=
0
\lim_{t\to\infty}s(t)=0
limt→∞s(t)=0
令
V
=
1
2
s
2
V=\frac{1}{2}s^2
V=21s2,明显满足(1)(2)条件,对于第三个条件
V
˙
(
x
)
=
s
˙
s
\dot{V}(x)=\dot{s}s
V˙(x)=s˙s
趋近律就是指的
s
˙
\dot{s}
s˙(趋近律是为了使 s收敛到0,例如,
s
>
0
s>0
s>0时,
s
˙
<
0
\dot s<0
s˙<0,那么
s
s
s就会收敛到0。滑模运动包括趋近运动和滑模运动两个过程。趋近运动为s→0的过程,滑模运动即
e
r
r
→
0
,
e
r
r
˙
→
0
err→0,\dot{err}→0
err→0,err˙→0的过程。趋近律一般有如下几种设计:

对于
s
˙
=
−
ε
s
g
n
(
s
)
−
k
s
\dot{s}=-\varepsilon sgn(s)-ks
s˙=−εsgn(s)−ks,令
u
=
J
(
−
c
θ
˙
−
1
J
(
η
s
g
n
(
s
)
+
k
s
)
)
u=J(-c\dot{\theta}-\frac{1}{J}(\eta sgn(s)+ks))
u=J(−cθ˙−J1(ηsgn(s)+ks))
带入
V
˙
=
s
(
c
θ
˙
+
1
J
(
u
+
d
(
t
)
)
)
\dot{V}=s(c\dot{\theta}+\frac{1}{J}(u+d(t)))
V˙=s(cθ˙+J1(u+d(t)))
得
V
˙
=
1
J
(
−
k
s
2
−
η
∣
s
∣
+
s
d
(
t
)
)
≤
−
1
J
k
s
2
\dot{V}= \frac{1}{J}(-ks^2-\eta|s|+sd(t))\leq -\frac{1}{J}ks^2
V˙=J1(−ks2−η∣s∣+sd(t))≤−J1ks2
满足条件(3),则即s=0是平衡点,满足渐近稳定性。
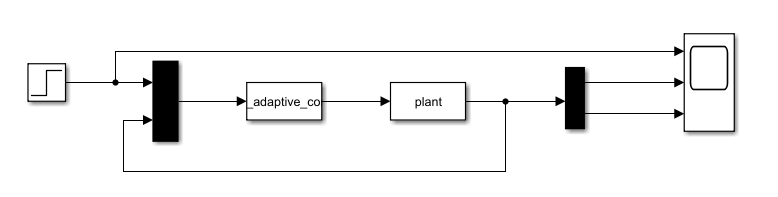
1.程序设计
控制器代码
function [sys,x0,str,ts] = simple_adaptive_controller(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数
sizes = simsizes;
sizes.NumContStates = 0; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 1; %输出变量个数
sizes.NumInputs = 3; %输入变量个数
sizes.DirFeedthrough = 1; %输入信号是否在输出端出现
sizes.NumSampleTimes = 0; % at least one sample time is needed
sys = simsizes(sizes);
x0 = []; %初始值
str = [];
ts = []; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState';
function sys=mdlOutputs(t,x,u) %计算输出子函数
J = 2;
thd = u(1);
th = u(2);
dth = u(3);
e = th - thd;
de = dth;
c = 10;
s = c*e + de;
xite = 1.1;
k = 0;
ut = J*(-c*dth-1/J*(k*s+xite*sign(s)));
sys(1) = ut;
受控对象代码(干扰为sint)
function [sys,x0,str,ts] = plant(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=mdlDerivatives(t,x,u); %调用计算微分子函数
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数
sizes = simsizes;
sizes.NumContStates = 2; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 2; %输出变量个数
sizes.NumInputs = 1; %输入变量个数
sizes.DirFeedthrough = 0; %输入信号是否在输出端出现
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [0, 0]; %初始值
str = [];
ts = [0 0]; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState';
function sys = mdlDerivatives(t, x, u) %计算微分子函数,微分方程求解
J = 2;
dt = sin(t);
ut = u(1);
sys(1) = x(2);
sys(2) = 1/J*(ut+dt);
function sys=mdlOutputs(t,x,u) %计算输出子函数
sys(1) = x(1);
sys(2) = x(2);

参考:
【控制理论】滑模控制最强解析
滑模控制程序及Simulink仿真
滑模控制自学笔记
Matlab S函数 function sys=mdlDerivatives(t,x,u)
【Matlab】简单的滑模控制程序及Simulink仿真
滑模变结构控制MATLAB仿真-基本理论与设计方法,刘金琨著

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)