
快速上手,ADAS测试
传感器的数据用于控制车辆,比如aeb,车辆在哪个位置开始进行刹车,这个位置上的车速到底是多少,这些数据是实际执行的结果,这个数据来自于真值系统。被测车辆(传感器),传感器比如雷达可以获取到目标物体的位置和速度等信息,还需要有被测车辆的位置和速度等信息,要想保证位置和速度信息的准确性,需要通过一个比较可靠的、精度足够的系统来获取,这个系统就是真值系统。零部件A---------(can/lin/以太
课程内容
1、adas测试的被测对象
2、adas测试流程
3、adas测试思路
adas测试的被测对象
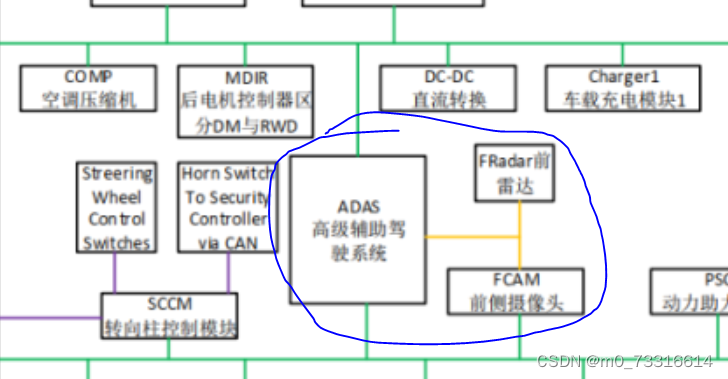
adas系统=adas控制器+传感器
adas的控制器属于域控制器(dcu),比ecu功能更复杂。
零部件A---------(can/lin/以太网)------------零部件B
adas系统属于自动驾驶中的一个阶段。
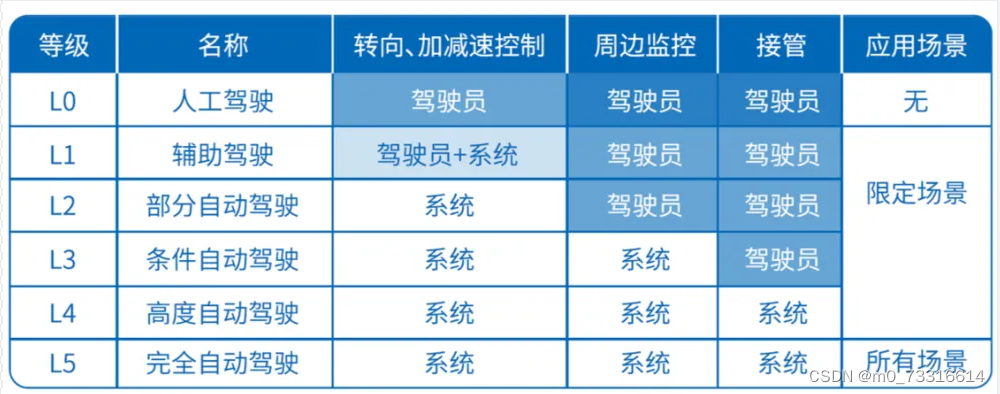
目前企业主要是在L2和L3。
adas控制器结合传感器就实现了各种adas的功能。
adas功能
BSD
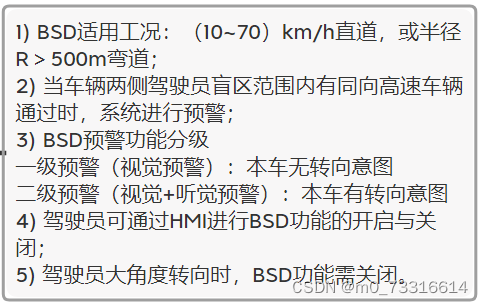
以上的功能描述主要涉及:
1、功能适合的道路
2、功能细节
3、人的操作
4、功能的开启和关闭
传感器
adas系统中使用到的传感器都有可能需要去做标定。有的传感器可以不用做标定。
传感器用来采集环境数据,包括:
1、位置
2、速度
3、高度
传感器可以将采集到的数据通过can总线给到adas控制器。

原始数据需要经过标定处理后,经过数据计算得到处理后的数据。
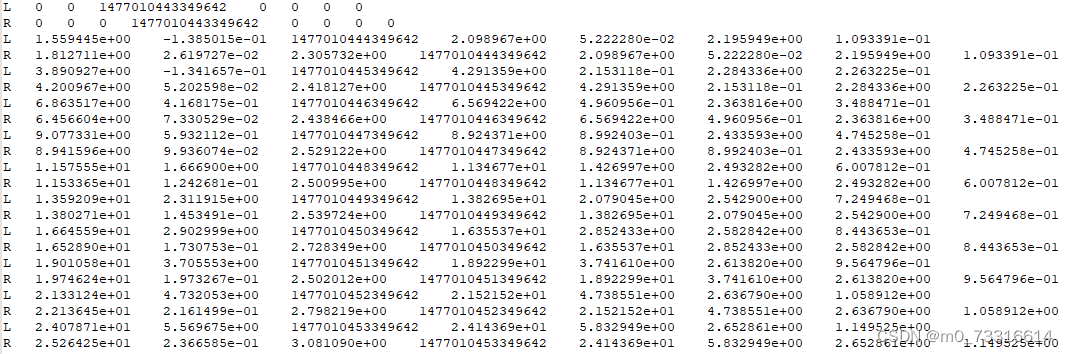
上图中L表示激光雷达的数据,R表示毫米波雷达的数据,两个数据融合在一起。
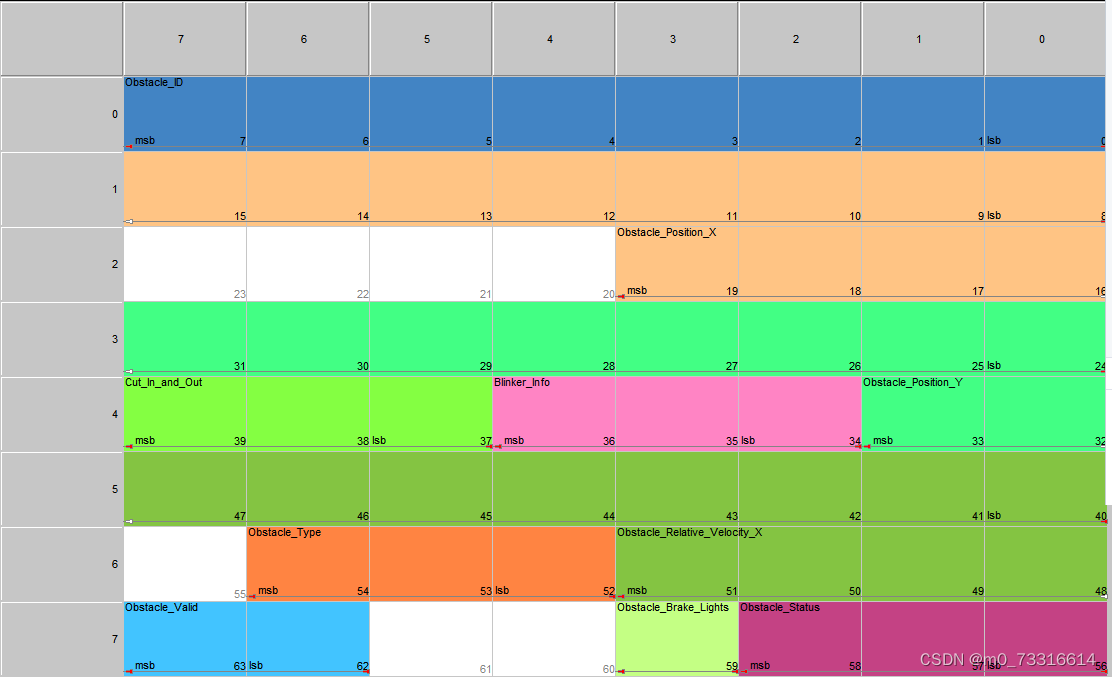
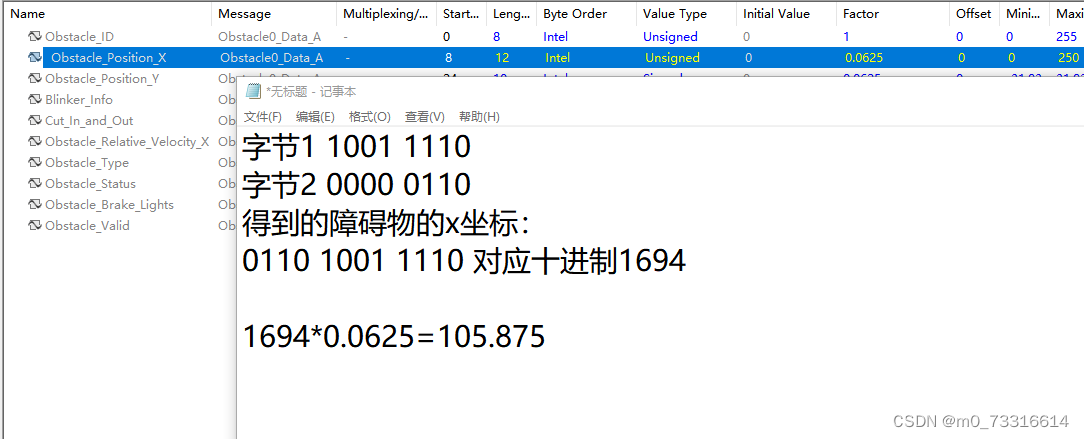
利用can工具抓取到传感器通过can总线发给adas控制器的报文,结合dbc文件,可以解析出报文中每个信号的取值。
adas测试流程
adas研发团队组成
测试团队可以进行分组:
1、实验管理
主要负责测试仪器、测试环境的管理。
2、测试用例
专门编写测试用例的小组。
3、台架测试
实际就是hil(硬件在环)测试。
4、整车测试
1)试验场测试
封闭和可控的路况,能够测试的更细。
2)开放道路测试
路测和耐力跑都属于开放道路测试。
试验场测试流程
传感器测试
主要测试传感器性能。
传感器并未集成在车上,需要自行安装。传感器需要做标定。
标定对应参数调整。
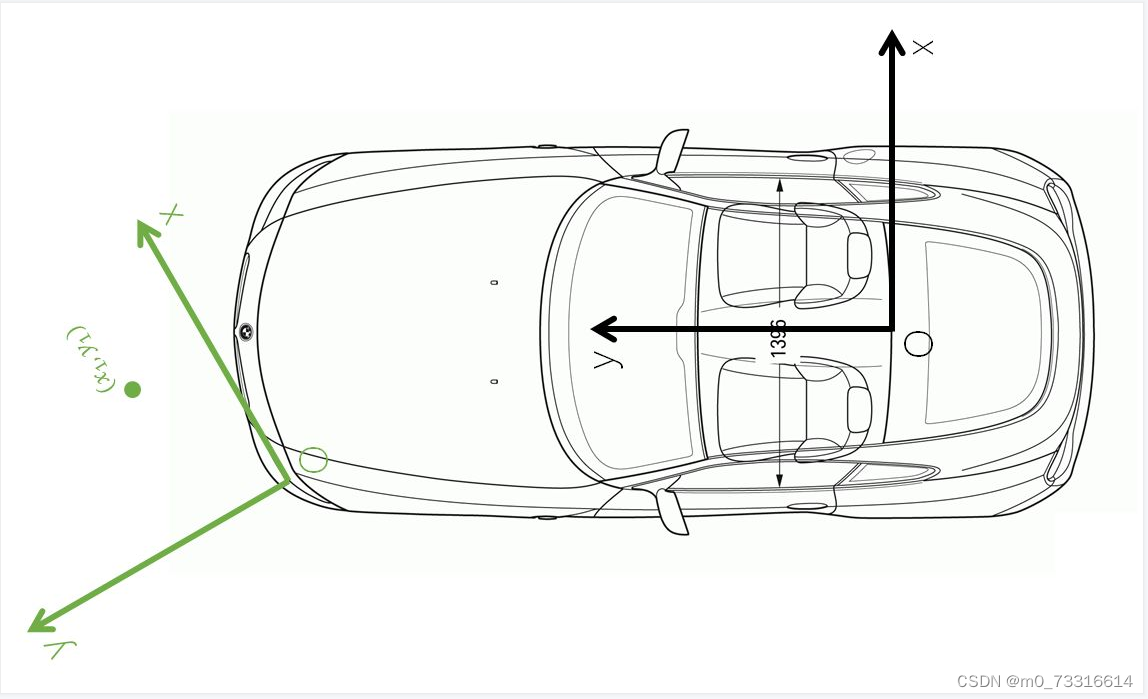
比如雷达标定。雷达需要采集坐标和速度等数据。雷达安装的位置可能会导致坐标的采集不够准确,需要进行调整(坐标换算)。
需要使用标定软件(比如canape)发送比如16个bit的数据给雷达来进行标定。一般涉及的数据有两条,一条修改,一条查询标定进度。
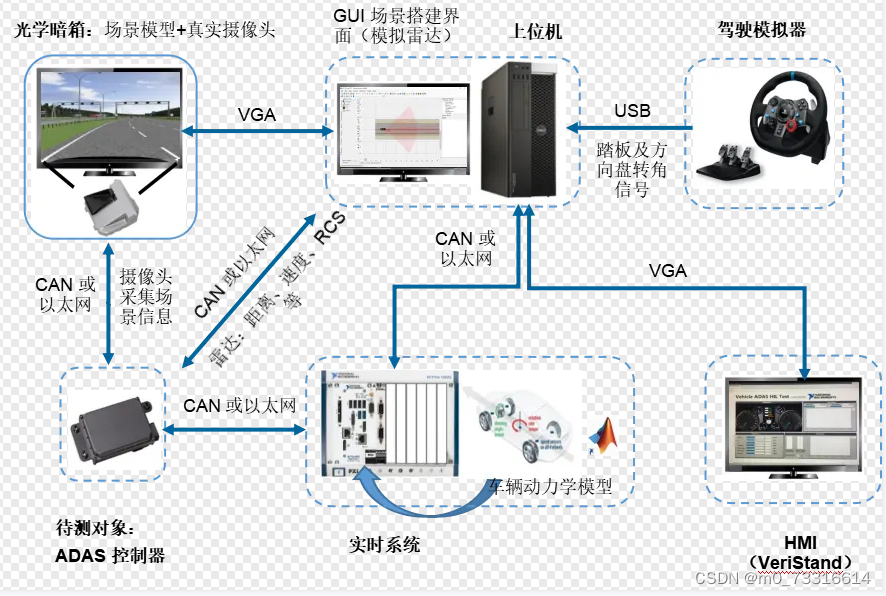
测试前除了安装传感器,还需要找试验场来租赁并安装真值系统,真值系统安装在网关上。
被测车辆(传感器),传感器比如雷达可以获取到目标物体的位置和速度等信息,还需要有被测车辆的位置和速度等信息,要想保证位置和速度信息的准确性,需要通过一个比较可靠的、精度足够的系统来获取,这个系统就是真值系统。
传感器的数据用于控制车辆,比如aeb,车辆在哪个位置开始进行刹车,这个位置上的车速到底是多少,这些数据是实际执行的结果,这个数据来自于真值系统。真值系统的数据可以通过can工具来进行抓取。真值系统的数据和测试用例中预期的数据进行比对,如果不一致就可能是bug。
adas功能测试
由于adas相关的功能比较多,而试验场地是比较有限的,所以基本都是adas的功能排队等测试。每一轮测试一些功能,每轮的周期短的半个月,长的话1-2个月。一天执行的测试用例在10条左右。
BSD的测试用例40条,ACC的测试用例50条。
开发道路测试流程
主要包含:
1、路测
2、耐力跑
adas测试思路
测试用例思路
传感器测试
前置雷达性能测试用例,考虑的关键点有:
1、考虑不同目标物体类型
四轮车、两轮车、行人
2、考虑目标物体和被测车辆相对位置
并排、前方、后方
3、考虑目标物体和被测车辆的运动方向
驶向被测车辆、驶离被测车辆
4、考虑金属物体的识别
金属护栏、金属井盖等
adas功能测试
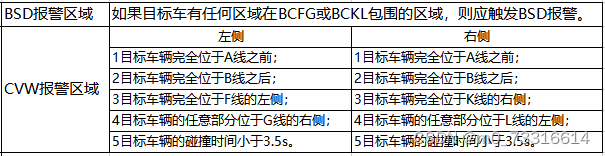
BSD和CVW对于目标车辆和线的关系是有区别的。
需要注意几个数字:70米、3米、0.5米。
一、BSD测试
1、考虑相邻车道上车的相对位置
2、考虑相隔车道上的车换到相邻车道,相邻车道上的车换到相隔车道
3、考虑相同车道上的车换到相邻车道,相邻车道上的车换到相同车道
4、考虑目标车超越被测车,被测车超越目标车
5、考虑直道和弯道,考虑不同车速
6、考虑左侧车道和右侧车道
二、CVW
和BSD类似,还需要考虑打转向灯、自车减速的情况。
bug例子
根据bug可以拓展一些测试思路:
1、测试时考虑四轮车时可以考虑不同尺寸的四轮车,比如公交车、卡车、大货车等。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)