
向量的点乘与叉乘概念理解以及C++代码实现
点乘与叉乘是线性代数的基本知识,在工作中也经常能够遇到,下面我们来温习一下它们的概念以及使用C++代码对它们进行实现。
点乘与叉乘是线性代数的基本知识,在工作中也经常能够遇到,下面我们来温习一下它们的概念以及使用C++代码对它们进行实现。
1. 点乘
- 概念
向量的点乘,也叫点积、内积、数量积。是指在实数R上的两个向量的一种二元运算,这种运算返回一个实数值标量。点乘有两种定义方式:代数方式和几何方式。
- 代数方式
已知两个向量
a
→
=
[
a
1
,
a
2
,
.
.
.
,
a
n
]
\overrightarrow{a} = [a_1, a_2,...,a_n]
a=[a1,a2,...,an]和
b
→
=
[
b
1
,
b
2
,
.
.
.
,
b
n
]
\overrightarrow{b} = [b_1, b_2,...,b_n]
b=[b1,b2,...,bn],则向量
a
→
\overrightarrow{a}
a与向量
b
→
\overrightarrow{b}
b的内积代数定义为:
a
⋅
b
=
a
1
b
1
+
a
2
b
2
+
.
.
.
+
a
n
b
n
a\cdot b=a_1b_1+a_2b_2+...+a_nb_n
a⋅b=a1b1+a2b2+...+anbn
代数表示:对应元素相乘相加。
- 几何定义(2维和3维)
已知两个向量
a
→
=
[
x
1
,
y
1
,
z
1
]
\overrightarrow{a} = [x_1,y_1,z_1]
a=[x1,y1,z1]和
b
→
=
[
x
2
,
y
2
,
z
2
]
\overrightarrow{b}=[x_2,y_2,z_2]
b=[x2,y2,z2],它们的模值分别为
∣
a
∣
|a|
∣a∣和
∣
b
∣
|b|
∣b∣,它们的夹角为
θ
∈
[
0
,
π
]
\theta \in \ [0,\pi]
θ∈ [0,π],那么向量
a
→
\overrightarrow{a}
a与向量
b
→
\overrightarrow{b}
b的几何定义为:
a
⋅
b
=
∣
a
∣
∣
b
∣
c
o
s
θ
a\cdot b = |a||b|cos\theta
a⋅b=∣a∣∣b∣cosθ
几何意义: 可以用来表示一个向量在另一个向量上的投影长度,为一个标量。
2. 叉乘
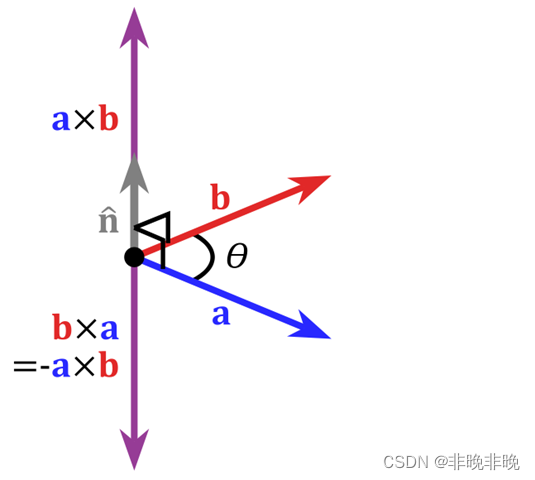
向量的叉乘,也叫叉积、外积、向量积,是一种在向量空间中(也就是说向量元素个数为3)向量的二元运算。与点积不同,叉乘的运算结果是一个向量而不是一个标量,并且两个向量的叉积与这两个向量所构成的平面垂直。
- 定义方式
已知两个向量 a → = [ x 1 , y 1 , z 1 ] \overrightarrow{a} = [x_1,y_1,z_1] a=[x1,y1,z1]和 b → = [ x 2 , y 2 , z 2 ] \overrightarrow{b}=[x_2,y_2,z_2] b=[x2,y2,z2],它们的模值分别为 ∣ a ∣ |a| ∣a∣和 ∣ b ∣ |b| ∣b∣,它们的夹角为 θ ∈ [ 0 , π ] \theta \in \ [0,\pi] θ∈ [0,π],那么向量 a → \overrightarrow{a} a与向量 b → \overrightarrow{b} b的叉乘表示为:
模值: ∣ a × b ∣ = ∣ a ∣ ∣ b ∣ s i n θ |a × b | = ∣ a ∣ ∣ b ∣ s i n θ ∣a×b∣=∣a∣∣b∣sinθ模的几何意义:模 ∣ a × b ∣ |a × b | ∣a×b∣, 即以a和b为两条边的平行四边形的面积方向:两个向量的叉积与这两个向量所构成的平面垂直,且遵循右手准则(右手的四指从a以不超过180°的转角转向b时,竖起的大拇指指向是叉乘的方向。)
- 坐标运算
假设: i 、 j 、 k i、j、k i、j、k分别为XYZ三个轴的单位向量,则叉乘运算表示如下:
a → × b → = ∣ i j k x 1 y 1 z 1 x 2 y 2 z 2 ∣ = [ y 1 z 2 − y 2 z 1 , − ( x 1 z 2 − x 2 z 1 ) , x 1 y 2 − x 2 y 1 ] \overrightarrow{a}×\overrightarrow{b} = \begin{vmatrix} i& j& k\\ x_1& y_1& z_1 \\ x_2& y_2& z_2 \\ \end{vmatrix}=[y_1z_2-y_2z_1,-(x_1z_2-x_2z_1),x_1y_2-x_2y_1] a×b=∣ ∣ix1x2jy1y2kz1z2∣ ∣=[y1z2−y2z1,−(x1z2−x2z1),x1y2−x2y1]
特殊情况,如果a和b在平面XY上,那么Z=0,所以上面得到的值 ∣ x 1 y 2 − x 2 y 1 ∣ |x_1y_2 - x_2y_1| ∣x1y2−x2y1∣,方向朝Z轴。
3. 代码实现
根据对上面概念的理解,相信大家可以很快就能写出自己的点乘与叉乘函数操作,这里就不介绍了。在工作实际应用中,我们可能更多的使用Eigen对它们进行调用,Eigen可以很方便的实现点乘与叉乘操作,具体代码如下:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Vector3d v(1,2,3);
Vector3d w(0,1,2);
cout << "Dot product: " << v.dot(w) << endl;//点乘
double dp = v.adjoint()*w; //等同于点法
cout << "Dot product via a matrix product: " << dp << endl;
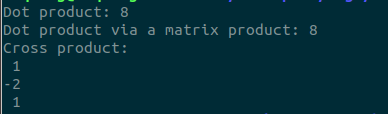
cout << "Cross product:\n" << v.cross(w) << endl;//叉乘
}
输出:

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)