
阿克曼转向模型介绍
阿克曼转向模型的基本原理是,前轮转向时,左右前轮的转向角度应该是不同的,这是为了确保车辆可以平稳地转弯,并且不会造成轮胎损耗。阿克曼转向模型可以用于设计和控制汽车的转向系统。根据阿克曼转向几何设计转向机构,在车辆沿着弯道转弯时,利用四连杆的相等曲柄,可以使内侧轮的转向角比外侧轮大大约 2~4 度,使四个轮子路径的圆心大致上交会于后轴的延长线上瞬时转向中心,从而让车辆可以顺畅的转弯。从公式中可以看出
阿克曼转向模型介绍
是什么?
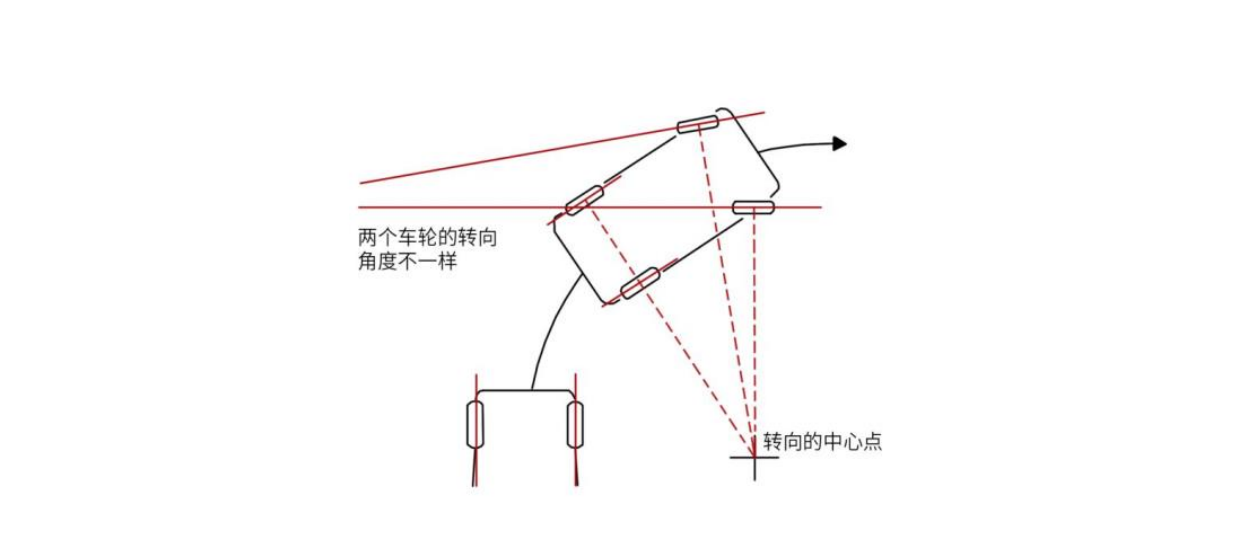
阿克曼转向是一种现代汽车的转向方式,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎。
它描述了汽车转向系统中前轮转向角度与转向机构参数之间的关系。在汽车设计和控制系统中,阿克曼转向模型被广泛应用,因为它可以帮助工程师更好地理解和控制汽车的转向行为。下图就是理想的阿克曼转向
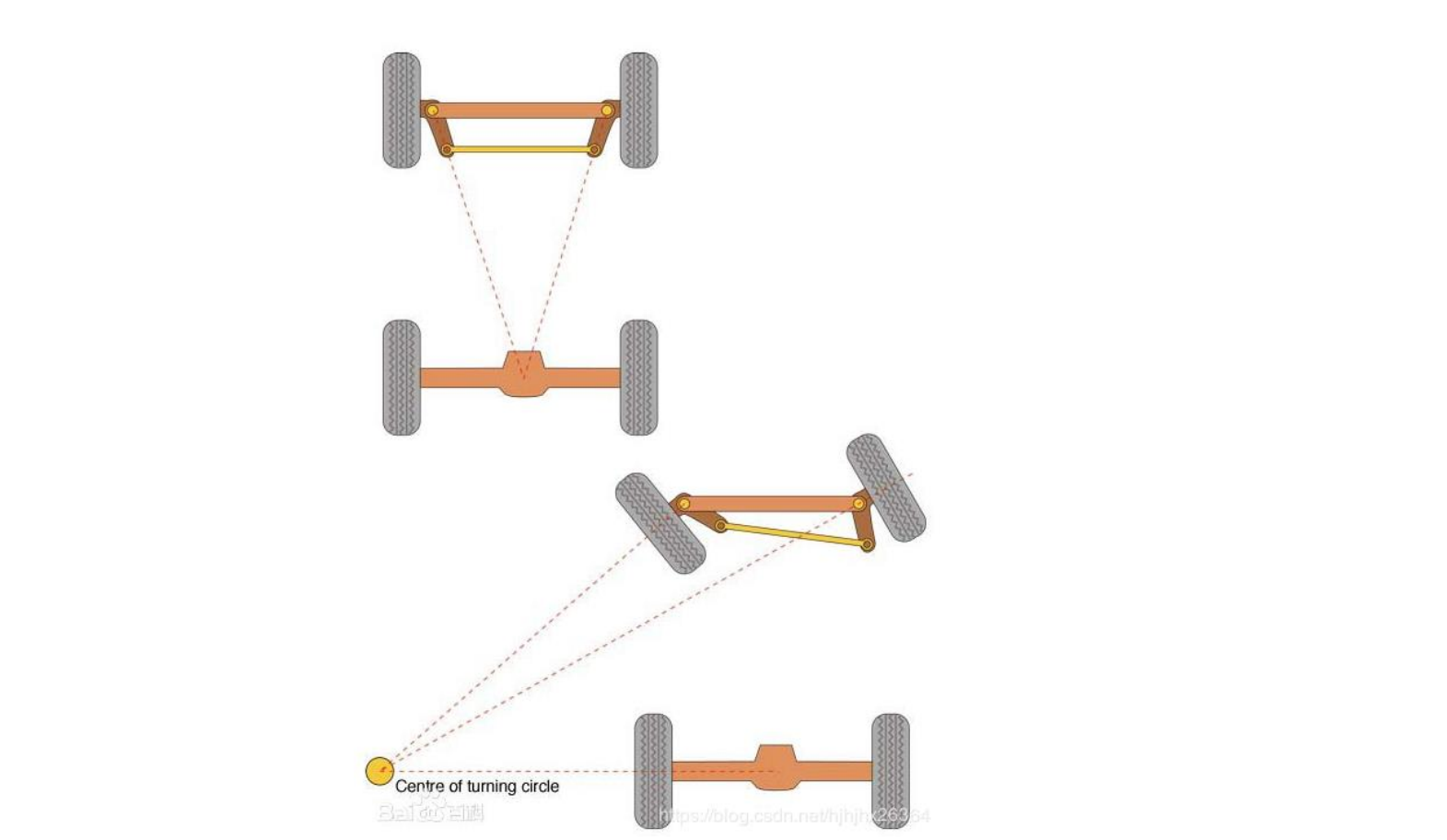
根据阿克曼转向几何设计转向机构,在车辆沿着弯道转弯时,利用四连杆的相等曲柄,可以使内侧轮的转向角比外侧轮大大约 2~4 度,使四个轮子路径的圆心大致上交会于后轴的延长线上瞬时转向中心,从而让车辆可以顺畅的转弯。
基本原理
阿克曼转向模型的基本原理是,前轮转向时,左右前轮的转向角度应该是不同的,这是为了确保车辆可以平稳地转弯,并且不会造成轮胎损耗。阿克曼转向模型描述了前轮转向角度、车轮转角、转向杆长度和转向半径之间的关系。通过调整转向杆长度和车轮转角,可以控制车辆的转向半径和转向性能。
阿克曼转向模型的数学表达式如下:
其中,δf 和 δr 分别表示前轮和后轮的转向角度,L 表示前后轮轴之间的距离,W 表示左右前轮之间的距离,R 表示转向半径。
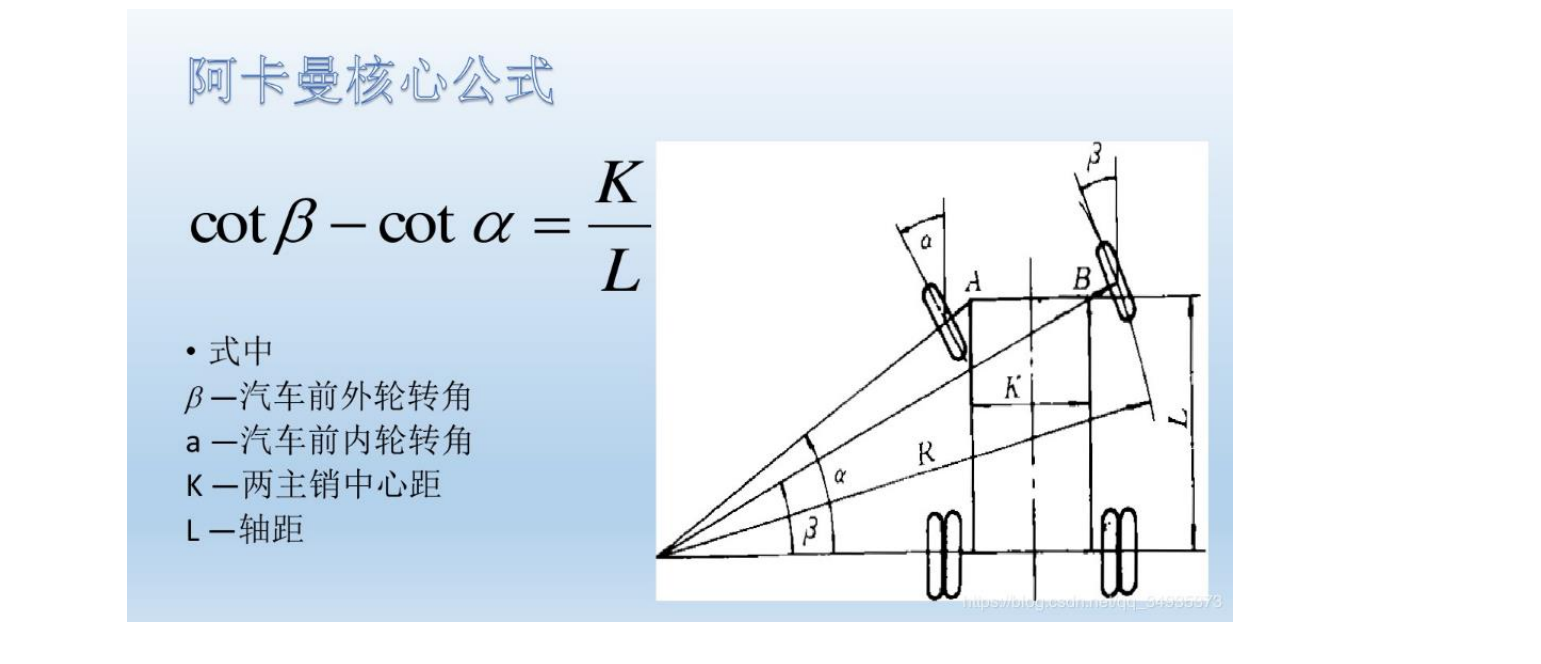
从公式中可以看出,当车辆转弯时,前轮的转向角度应该大于后轮的转向角度,这是为了确保车辆可以平稳地转弯,并且不会造成轮胎损耗。当转向半径增大时,前轮的转向角度应该增大,转向杆长度应该增加,而车轮转角则应该减小。
如果我们把每个轮子的运动半径画出来的话,就会得到图上所示画面。
那么,现在明白为什么倒库比正着往里开更容易了么?因为后轮的运动半径小于前轮的运动半径,所以相对于两前轮而言,后轮的运动范围更小,这也就意味着更容易将车“塞”进停车位。
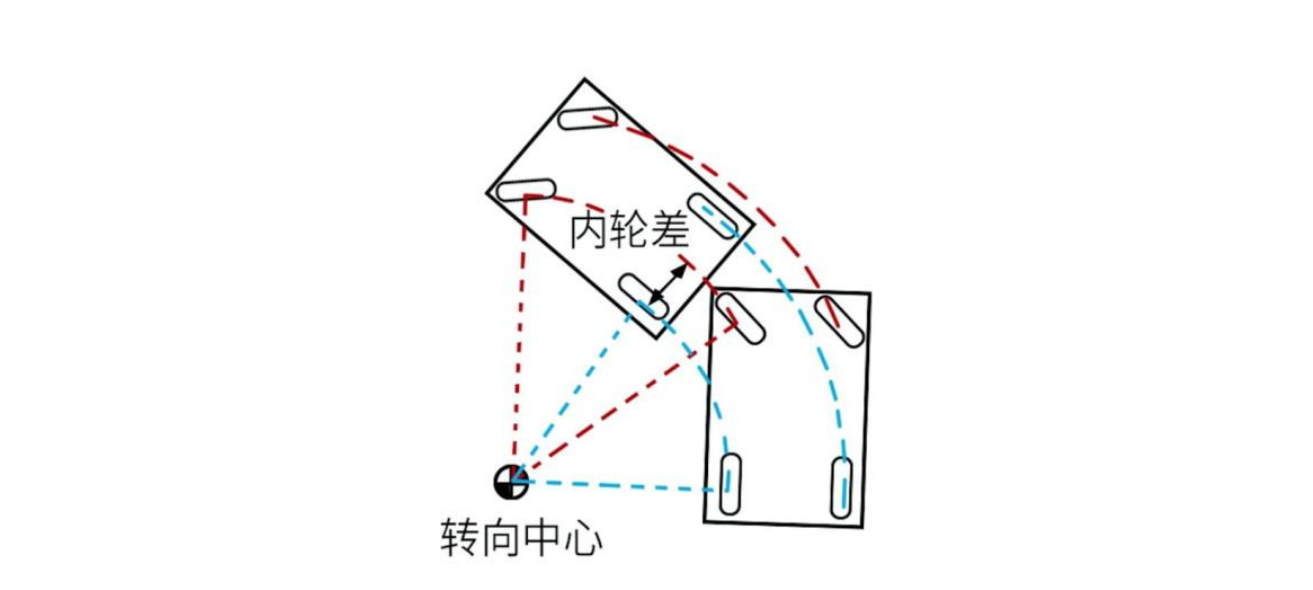
在车辆转弯的时候,内侧车轮的转弯半径明显会短于外侧车轮。这时,如果我们希望两个转向轮可以正常转弯,就需要让内侧车轮的转角大于外侧车轮。
应用与改进
阿克曼转向模型可以用于设计和控制汽车的转向系统。例如,当设计车辆时,工程师可以使用阿克曼转向模型计算出前轮的转向角度和转向杆长度,以确保车辆可以平稳地转弯。在控制系统中,阿克曼转向模型可以用于计算车轮的理论转向角度,以便控制车辆的行驶方向和转向性能。
尽管阿克曼转向模型是汽车转向系统中最基本的模型之一,但它仍然存在一些局限性。例如,该模型假设所有车轮都是均匀的,实际上车轮之间存在差异,这可能会影响车辆的转向性能。此外,该模型假设车辆在转弯时不会发生侧滑,但实际上车辆在转弯时可能会发生侧滑,这也可能会影响车辆的转向性能。
- 汽车设计和制造:阿克曼模型可以用于设计和制造汽车转向系统,以确保汽车可以平稳地转弯并具有良好的转向性能。例如,在设计转向系统时,可以使用阿克曼模型计算前轮的转向角度和转向杆长度,以确保车辆在转弯时具有最佳的转向性能。
- 控制系统中的应用:阿克曼模型可以用于计算车轮的理论转向角度,以便控制车辆的行驶方向和转向性能。例如,在车辆控制系统中,可以使用阿克曼模型计算车辆的转向半径和转向角度,从而确定车辆的行驶方向和转向性能。
- 车辆动力学研究:阿克曼模型可以用于研究车辆动力学,如车辆在转弯时的侧滑和滚动等现象。通过对阿克曼模型的改进,可以考虑车轮差异、侧滑和滚动等因素,从而更准确地预测车辆的转向性能和稳定性。
- 自动驾驶和智能交通系统:阿克曼模型可以用于自动驾驶和智能交通系统中,以帮助车辆更准确地识别和处理路况信息,从而实现更安全和高效的行驶。例如,在自动驾驶系统中,可以使用阿克曼模型计算车辆的转向角度和转向半径,以帮助车辆更准确地进行转弯操作。
- 基于深度学习的改进:近年来,基于深度学习的方法已经被广泛应用于汽车控制系统中,可以通过结合阿克曼模型和深度学习方法来改进汽车的转向性能。例如,可以使用深度学习方法来识别和处理路况信息,从而更准确地计算车辆的转向角度和转向半径,以实现更安全和高效的行驶。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)