【道路交通管理与控制】第五章——单点交叉口的信号控制
点控的内容介绍
文章目录
一、交通信号控制的基本概念
1.1 交通信号灯及其设置依据
交通信号灯及其控制技术随着社会的发展而发展。早期的交通信号灯只有红、绿两种灯色,绿色表示允许通行,红色表示禁止。后来出现了黄灯,黄灯对驾驶人争道起预警作用,黄灯亮表示红灯即将亮,车辆必须停止。
一般来说,当交通量发展到接近停车或让路标志交叉口所能处理的能力时,才在这种交叉口上加设交通信号控制。我国于 1994 年颁布实施了国家标准《道路交通信号灯安装规范》 (GB 14886-94) 。该规范对我国各道路交叉口和路段上交通信号灯的安装依据、安装方法和安装要求作出了规定。设置信号灯主要标准为主道路宽度、主路高峰小时交通量和 12h 流量以及支路高峰小时流量和 12h 流量。
1.2 交通信号控制参数
一般来说,在交通控制中至少有 3 个基本参数是可以由信号机直接控制的:周期 C C C,绿信比 λ \lambda λ 和相位差 t o s t_{os} tos。除此之外,某些信号机还可以对相位数进行控制,如从 2 相位变成 4 相位等。
1. 步伐和步长
某一时刻,灯控路口各个方向各信号灯状态所组成的一组确定的灯色状态称为步伐,不同的灯色状态构成不同的步伐。步伐的持续时间即为步长。
2. 周期
用于指挥交通的信号总是一步一步循环变化的,一个循环由有限个步伐构成。一个循环内各步伐的步长之和称为信号周期。
3. 相位
一个周期内,平面交叉口上某一支或几支交通流所获得的通行权称为信号相位。
4. 绿信比
在一个信号周期中,各相位的有效绿灯时间与周期长度的比值称为绿信比。相位 i i i 的有效绿灯时间 g e i g_{ei} gei 计算公式为: g e i = g i + Y i − l i g_{ei}=g_i+Y_i-l_i gei=gi+Yi−li 式中, g i g_i gi 为第 i i i 相位的绿灯时间; Y i Y_i Yi 为黄灯时间; l i l_i li 为损失时间,包括启动损失和后损失时间。
5. 相位差
相位差分为绝对相位差和相对相位差。
在一个交通干线协调控制系统中,干线上所有路口的信号周期,各路口规定某一相位参加协调,称为协调相位。把干线上某一路口作为基准路口,其他各路口的协调相位起始时刻滞后于基础路口的协调相位起始时刻的最小时间差,称为绝对相位差。
沿车辆行驶方向任意相邻路口的协调相位起始时刻的最小时间差,成为相对相位差。当车辆行驶方向相反时,两个相邻的路口的相对相位差可能不一样,但两者之和等于一个周期的长度。
二、信号控制的类型和模式
2.1 交通信号控制类型
按照控制范围可分为单点、干线和区域信号控制,即点、线、面控。
按照控制方法可分为定时、感应和自适应控制。
2.2 交通信号控制模式
常见的交通信号控制模式有以下几种。
- 周期控制模式
- 相位差与绿信比控制模式
- 时间表控制模式
- 子区域连接控制模式
三、定时信号控制
3.1 定时信号配时的基本内容
1. 确定信号相位方案
确定信号相位方案,是对信号轮流给某些方向的车辆或行人分配通行权顺序的确定,即相位方案是在一个周期内,安排了若干种控制状态,并合理地安排了这些控制状态的显示次序。
2. 确定信号基本控制参数
点控定时信号基本控制参数有周期和绿信比。其中,周期是决定点控定时信号交通效益的关键控制参数,是信号配时设计的主要对象。
3.2 定时信号配时的基本原理
定时信号配时的基本原理是:根据交叉口的道路条件及交叉口各进口道到达交通流的流向与流量来确定定时信号的配时方案。
到目前为止,定时信号的配时方法在国际上主要有英国的 TRRL 法(也称为 Webster 法)、澳大利亚的 ARRB 法(阿克塞力克法)以及美国的 HCM 法等,在我国也有“停车线法”和“冲突点法”等方法。
在点控中,利用 Webster 法对路口进行信号配时,主要的决定因素是信号周期和绿灯时间。
1. 最短信号周期 C m C_m Cm
交叉口的信号配时,应选用同一相位流量比中最大的进行计算。采用最短信号周期 C m C_m Cm 时,要求在一个周期内到达交叉口的车辆恰好全部被放行。因此, C m C_m Cm 恰好等于一个周期内损失时间之和加上全部到达车辆以饱和流量通过交叉口所需时间。有 C m = L 1 − Y C_m=\frac{L}{1-Y} Cm=1−YL 式中, L L L 为周期损失时间; Y Y Y 为各相位最大流量比之和。
2. 最佳信号周期 C 0 C_0 C0
最佳信号周期时长 C 0 C_0 C0 是信号控制交叉口上,能使通车效益指标最佳的交通信号周期时长。令 Webster 交叉口延误公式对周期 C C C 的导数为 0,可得近似最佳周期时长为 C 0 = 1.5 L + 5 1 − Y L = ∑ i ( l + I − A ) C_0=\frac{1.5L+5}{1-Y}\\L=\sum_i(l+I-A) C0=1−Y1.5L+5L=i∑(l+I−A) 式中, L L L 为每个周期的总损失时间; l l l 为启动损失时间; A A A 为黄灯时间; I I I 为绿灯间隔时间(上一相位绿灯结束到下一相位绿灯开始) ; i i i 为一个周期的相位数; Y Y Y 为各相位最大流量比之和。
3. 有效绿灯时间与最佳绿信比
与信号周期的确定一样,在各相位间,绿灯时间的分配也是以车辆延误最少为原则的,因此绿信比应该与流量比成正比。
每一相位的有效绿灯时间 g i g_i gi 计算方法为: g i = y i Y ( C 0 − L ) g_i=\frac{y_i}{Y}(C_0-L) gi=Yyi(C0−L)
3.3 定时信号配时的流程和方法
1. 定时信号配时设计流程
单个交叉口定时交通信号配时设计,要按照不同的流量时段来划分信号配时阶段,在同一时段内确定相应的配时方案。改建、治理交叉口,具有各流向设计交通量数据时,信号配时设计的流程如下。
- 确定时段划分以及各时段内的各进口道各流向的设计交通量。
- 确定各进口车道渠化方案以及信号相位方案。
- 确定各相位各类车道设计流量比和绿灯间隔时间。
- 计算最大设计流量比总和,如果未超过 0.9,进行下一步,否则需重新确定车道渠化方案。
- 计算最佳周期。
- 计算各相位绿信比及绿灯显示时间,如果满足最短绿灯时间要求,进行下一步,否则需重新计算周期。
- 计算延误,如满足服务水平要求,画出信号配时图,否则需重新渠化。
2. 信号相位基本方案
在设定信号相位时,应遵循以下原则。
- 信号相位必须同交叉口进口道车道渠化方案同时设定,有专用转弯相位必须相应地设置专用车道;
- 有左转专用车道时,根据左转流向设计交通量计算的左转车每周期平均到达 3 辆时,宜使用左转专用相位;
- 同一相位各相关进口道左转车每周期平均到达量相近时,宜用双向左转专用相位。
对于新建交叉口,缺乏交通量数据时,可以先根据进口道车道数,选取初步试用方案,后面根据通车后实际交通各流向的流量调整渠化及信号相位方案。
3. 设计交通量
设计交通量须分进口道和流向进行确定,主要依据为配时时段中最高 15min 的流率或高峰小时交通量和高峰小时系数。
4. 饱和流量计算
饱和流量的定义是:在一次连续的绿灯信号时间内,进口道上一列连续车队能通过停止线的最大流量,单位是 pcu/绿灯时间。
饱和流量用实测平均基本饱和流量乘以各类影响因素校正的方法估算。一条直行车道的基本饱和流量平均可取 1650pcu/h,左右转车道可取 1550pcu/h。
5. 配时参数计算
根据 3.2 节基本原理进行计算。
6. 信号交叉口的通行能力和饱和度
道路交通通行能力道路交通设施能够处理交通的能力。信号交叉口一条进口道的通行能力是此进口道上各条进口车道通行能力之和;一条进口道的通行能力是该车道饱和流量及其所属相位绿信比的乘积。
饱和度是各车道实际到达交通量与该车道通行能力之比。
7. 服务水平估计
信号交叉口设计与交通信号配时的服务水平,根据计算的平均信号控制延误确定。用作交叉口服务水平评价的延误是 15min 分析期间的平均每车信号控制延误。
信号控制延误是反映车辆在信号交叉口上受阻、行驶时间损失的评价指标。
延误的影响因素众多,涉及交叉口几何设计与信号配时的各个方面。
每车信控延误数值与信号交叉口服务水平的对应关系如下表所示。新建、改建交叉口设计服务水平宜取 B 级,治理交叉口宜取 C 级。

3.4 定时信号控制的改进方法
在 Webster 延误公式中,当饱和度趋于 1 时,计算出的延误会趋于无穷大,更无法计算超饱和交通情况下的延误。此外, TRRL 法主要针对机动车交通的信号配时,对于我国混合交通的特点也有其局限性。
基于延误优化
澳大利亚的 ARRB 法就是通过改进 Webster 延误公式得到的,它考虑了超饱和交通的情况。针对我国混合交通的情况,可以把非机动车流折合成机动车流,然后把折合后的车流量和机动车流量相加。
基于混合交通优化
当行人绿灯信号启亮,行人开始过街时,往往上一相位绿灯末期驶入的车辆还未通过该人行横道,造成不同交通流之间的冲突,影响交叉口的通行能力。
基于机非协调控制的改进
针对我国典型 4 相位(双向左转)信号交叉口,以往的研究表明:行人和非机动车交通流与机动车交通流相比,绿灯启亮后所保持的饱和状态时间较短,而绿灯时饱和状态出现的时刻较早,因而可以有效地运用包括早起、早断等控制方式在内的多相位控制交通。
基于行人的信号配时改进
1)交叉口行人信号灯设计
在信号交叉口配时设计中,一般来说,行人相位伴随机动车相位同时设置。我国目前行人相位普遍存在的问题是时间分配不合理,行人相位时间大部分为绿灯时间,行人闪(行人清空)时间只有 3s 左右。我国道路安全法规定:绿灯亮时,准许行人通过人行横道;红灯亮时,禁止行人进入人行横道,但是已经进入人行横道的,可以继续通过或者在道路中心线处停留等候。这就造成了在绿灯末尾进入人行横道的行人,因清空时间不足而不能安全通过人行横道,被“卡”在中间进退不得。
完整的行人相位包括行人绿灯、行人闪、行人红灯三部分。在行人绿灯时间里,行人按照指示的方向穿过道路;在行人闪时间里,没有进入人行横道的行人不允许再进入,已经进入的可以继续通过人行横道或者到达安全岛。显示红灯时,不允许任何人通行。
行人绿灯时间应该使得一个周期内所有等待的行人离开路缘石进入交叉口。行人闪起到清空行人的作用,使在行人绿灯时间末尾进入人行横道的行人在冲突车流获得绿灯前通过冲突点。
2)行人专用相位设定
日本有一种混合交通相位设计,为一般的四相位机动车配时加上一个行人专用相位,在这个行人专用相位里,行人可以随意在交叉口内走动,而在其他相位里只允许机动车的运行。这种方法适用于行人流量大,机动车流量适中,自行车流量小的路口。
四、感应信号控制
上一节介绍的定时控制方法(包括多段式控制)是目前使用最广泛的一种控制方式,其配时方案是根据交通调查所得到的历史数据制定的,而且已经确定,即维持不变,直到下次重新进行交通调查。
这种方式不能适应交通流的随机变化,有时会出现这样的现象:亮绿灯的车道没有车辆通行,而亮红灯的车道上有车辆排队。这是开环控制带来的结果。为了克服这种现象,就必须采用闭环控制,即首先检测某车道是否有车辆到达,然后再决定是否给该车道开绿灯。这就是感应控制的基本原理。
由百度百科的定义,开环控制是指无反馈信息的系统控制方式,闭环控制是根据控制对象输出反馈来进行校正的控制方式。
4.1 感应信号控制的原理
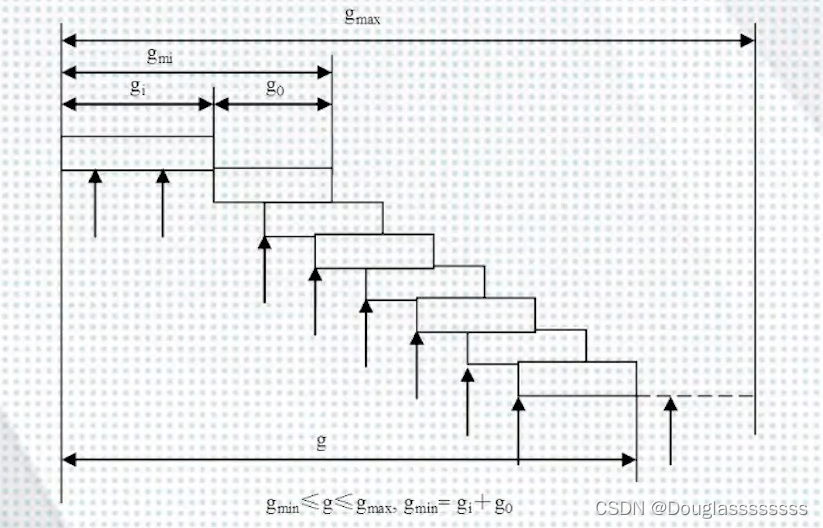
有一种感应信号的基本工作原理如下图(图片来源: B 站视频 ) 所示。一相位起始绿灯,感应信号控制器内预设有一个“初期绿灯时间 g i g_i gi”,到初期绿灯结束时,如在一个预置的时间间隔内(称之为“单位绿灯延长时间 g 0 g_0 g0”),无后续车辆到达,则可更换相位。
这个初期绿灯时间 g i g_i gi 加上单位绿灯延长时间 g 0 g_0 g0 就是最短绿灯时间 g min g_{\min} gmin。如检测器检测到有后续车辆到达,则每测得一辆车,就延长一个 g 0 g_0 g0。如果在延长的时间里未检测到有后来车,即切换相位;如果连续有车,则绿灯连续延长。不过它不会一直延长,当达到一个预置的“极限延长时间 g max g_{\max} gmax”时,即使检测到后面仍然有来车,也要切换相位。

1. 初期绿灯时间 g i g_i gi
给每个相位初期预先设置一段绿灯时间。不管本相位或其他相位是否有车,对本相位必须保证放完这段绿灯时间。这段时间的长度,取决于检测器的位置,以及检测器到停车线之间可以停放的车辆数。设置初期绿灯时间需要考虑以下几个因素:
- 保证停在检测器和停止线之间的车辆,全部驶出停止线所需的最短时间。初期绿灯时间应等于这段最短绿灯时间减去一段单位绿灯延长时间。
实际上可以通行的绿灯时间是包括初期和单位延长时间的。可以想象,在红灯时,排队末尾的车辆停在检测器上(它不被判定为后续来车,不会延长绿灯时间),如果初期绿灯时间小于第一条所述的时间,绿灯亮了,末尾那辆车是无法通过停车线的,导致二次排队。
- 保证行人安全过街所需的时间。
- 我国还需保证非机动车安全过街的时间。
排队等待车辆平均车头距离为 6m 时,美国推荐的随检测器位置而定的初期绿灯时间如下表所示。
 2. 单位延长时间
g
0
g_0
g0
2. 单位延长时间
g
0
g_0
g0
单位绿灯延长时间是初期绿灯时间结束后,在一定的时间间隔内,测得有后续车辆到达时所延长的绿灯时间。如果在这段时间内,没有测得来车,即被判定为交通中断而可结束绿灯。单位绿灯延长时间对于感应信号控制的效率起决定作用。确定单位绿灯延长时间时,应该考虑以下几个因素。
- 单位绿灯延长时间的长短必须能使车辆从检测器位置开出停车线。
- 单位绿灯延长时间的切当长度,应尽可能不产生绿灯时间损失。由于只要检测到的车辆间隔短于这个绿灯延长时间,绿灯总保留在这个相位上,为了提高通车效益,这段时间应该按实际需要定得尽可能短,应使单位绿灯延长时间尽可能只满足实际交通所需的长度,而不应等待不紧跟的车辆。合理的单位绿灯延长时间可以消除为等待少数车辆而浪费的绿灯时间,使绿灯延长时间高效运行。
- 在确定单位绿灯延长时间时,必须注意被检测的车道数。由于在一个相位的所有单个检测器通常都是连在一起的,因此,控制机所接收到的车辆间隔远比实际地车辆间隔要小得多。
3. 最短绿灯时间 g min g_{\min} gmin
最短绿灯时间是任一信号相位放行车辆的最短时间。为保证初期绿灯时间结束时后续又到达的车辆能安全通过,需要再预置一个“单位绿灯延长时间”,因此,最短绿灯时间实际上是初期绿灯时间与单位绿灯延长时间之和。
实际情况表明,因为初期绿灯时间已经保证了在检测器和停止线之间的所有车辆能够过交叉口,如果初期绿灯时间结束时后续没有车辆到达,其后再预置一个单位绿灯延长时间就浪费掉了。
因此,国外已经有将最短绿灯时间设置为小于初期绿灯时间与单位绿灯延长时间之和的做法,即在初期绿灯时间还没有结束时就开始单位绿灯延时时间。该做法的好处是能够保证行车安全,又不浪费时间。但是,在初期绿灯时间结束多久就开始绿灯延长时间,这是需要研究得。
4. 绿灯极限延长时间
绿灯极限延长时间是为了保持最佳绿信比而对各相位规定的绿灯时间的延长限度。信号到达绿灯极限延长时,强制绿灯结束并改换相位。但这时控制机应注意,最后一辆车因时间不够而未能通过停车线,尽量以最快的可能返回绿灯。
绿灯极限延长时间,实际上就是按定时信号最佳周期时长及绿信比分配到各个相位的绿灯时间,绿灯极限时间一般在 30~60s。有些感应控制机每个相位有两个绿灯极限时间,较长的一个在高峰时段大流量时使用。
绿灯极限延长时间确定以后,会使在此时间后紧接的后续车辆突然遇到黄灯而被迫紧急制动。改进的感应信号,采用可变绿灯极限时间。如果绿灯极限时间末尾的流量超过一个预置的临界值时,可使绿灯再延长;而这个预置临界值是在不断提高的,直到测得流量小于临界值时,结束绿灯并换相。
正确配时的感应信号(绿灯延长时间适当短),在运行中,不应经常出现绿灯极限时间,除非交叉口交通量超载。当交叉口超载而各相位经常出现绿灯极限时,感应控制机实际上是在按定时信号机操作。
4.2 传统的感应控制方法
传统的感应控制方法在实施的方式上可以分为两种:半感应和全感应控制。
所谓的半感应控制指的是在部分进口道上设置检测器的感应控制。如一些交叉口由主干路和次干道交汇而成,主干道流量大且较稳定,而次干道的交通量波动很大,这时在次干道安装检测器来控制次干道上信号。
半感应控制在工作时,主干道信号灯总是维持绿灯信号,次干道总是红灯,只有次干道能检测到车辆到来时,其灯色才可能转换为绿灯。根据检测器安装位置的不同,又可以分为两类。
1. 检测器设置在次要道路上
这种感应控制平时主路总是绿灯,对次路预置最短绿灯时间。但次路上检测到有车时,立即改变相位,次路为绿灯,后续无车时,相位返回到主路;否则到达最短绿灯时,强制改换相位。这种感应控制的运行流程如下图(图片来源:https://github.com/ImLaoBJie/ActuatedSignalControl,同主路半感应控制图)所示。

这种感应控制实质上是次路优先,只要次路有车到达就会打断主路车流。当次路车辆很少时,次路非机动车往往要等很长时间,等到有机动车到达时,才可一同通过交叉口。所以,这种半感应控制只是在某些特殊需要的地方,如消防队、救护车等重要机关出入口等才适用。
2. 检测器设置在主要道路上
这是上海市设计的一种半感应控制方式。这种感应控制方式平时主路总是绿灯,当检测器在一段时间内检测不到主路有车辆时,才换相位给次路通车;主路上检测到车辆到达时,通车相位返回主路。这种感应控制的流程如下图所示。这种控制方式可避免主路车流被次路车流打断,且有利于次路上自行车的通行。

所谓的全感应控制是指进口道上都设置检测器的感应控制,适用于相交道路等级相当、交通量相仿且变化较大的交叉口上。我国自行设计并制造了几种全感应信号控制机。
1)基本全感应控制
这种感应控制的控制机理是:当交叉口没有机动车到达时,信号机以定周期方式按最小周期运行。当某一方向来车时,则对来车方向放绿灯;以后就按感应信号的基本机理运行。
2)特殊感应控制
特殊感应控制,可在一般感应控制上,按特殊需要,增加特殊的感应装置,执行特殊需要感应控制功能。如公共交通优先感应控制,消防、警卫等特种车辆优先感应控制等。
4.3 改进的感应控制方法
感应控制中最重要的参数就是绿延时。在传统的感应控制中,绿时特别是绿延时往往不能被充分利用,因此又出现了许多基于全感应控制的改进方法。这些方法都是针对绿延时不能被充分利用而提出的,它们能更加有效地利用绿延时。
- 流量-密度控制
- 具有抢要功能的全感应控制
- 基于绿时有效利用率的感应控制
- 基于模糊控制和绿时有效利用率的全感应控制
- 基于流量—占有率模型的全感应控制
- 具有跳相功能的全感应控制
- 具有相序的全感应控制
- 优化感应控制
4.4 定时控制与感应控制比较
感应控制虽然更加地智能化,但是在实际运用中必须根据交叉口的具体情况来选择交通信号控制的方式。
1. 定时信号的优点
- 定时控制,因信号启动时间可取得一致而有利于同相邻交通信号的协调,特别是要联结几个相邻交通信号或一个信号网络系统时;
- 定时控制的正常工作,不必通过检测器对车辆的检测,因此,不存在路边停车及其他影响车辆检测的缺点;
- 定时控制比感应控制更适用于大量、均匀的行人交通的地方;
- 定时信号设施价格低于感应信号设施,且安装、维护方便。
2. 感应控制的优点
- 在交通量变化大且不规则、难以用定时控制处置的交叉口,以及在必须降低对主要干道干扰的交叉口上,用感应控制收益更大;
- 不适宜处于联动定时系统的交叉口,宜用感应控制;
- 感应控制特别适用于只在一天的部分时间里需要交通信号控制的地方;
- 感应控制在轻交通交叉口有优越性,不致使主要道路的交通产生不必要的延误;
- 感应控制,在有几个流向的交通流量时有时无或多变化的复杂交叉口上,可得到最大效益;
- 半感应信号通常适用于主次道路相交以及只在次路有车辆和行人时才中断主路车流的交叉口上。
五、单点交叉口的智能控制
在各种智能控制方法中,模糊控制与神经网络控制占据着主导地位。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐


 23
23 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)