亲测可用!!CANalyst—Ⅱ 连通与手动收发测试、python收发测试、双向收发测试
一、设备连通步骤二、手动测试步骤三、python收发测试四、双向收发测试
目录
官网:珠海创芯科技有限公司 - 珠海创芯科技,可下载相应的驱动程序和说明文档
一、设备连通步骤
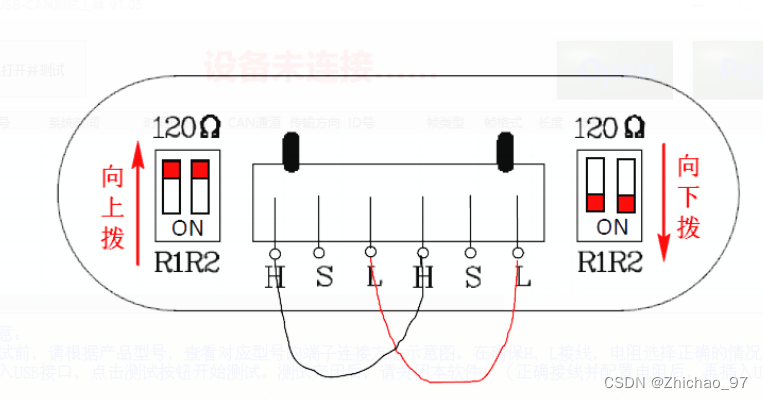
1. 将CANalyst—Ⅱ按照如下方式接线方式连接


实物图
2. USB一端连电脑,另一端连CANalyst—Ⅱ

3.安装USB-CAN Tool 调试软件
除了不想安装到C盘外,其它步骤一直点下一步就行
![]()
下载链接:
https://pan.baidu.com/s/1-_OvIwui0VXQS46-12sa6Q?pwd=o67h
提取码:o67h
安装完毕后:

4.运行USB-CAN Tool
4.1 USB-CAN Tool 界面菜单中,点击“设备操作-》USBCAN 测试工具”:


4.2 接好线,插入设备,点击左上角的“打开并测试”按钮,软件会自动测试(依次打开设备->初始化 CAN1/CAN2 两个通道->CAN1 发送一个序列、CAN2 接收并校验->CAN2发送一个序列、CAN1 接收并校验->关闭设备->结果显示):
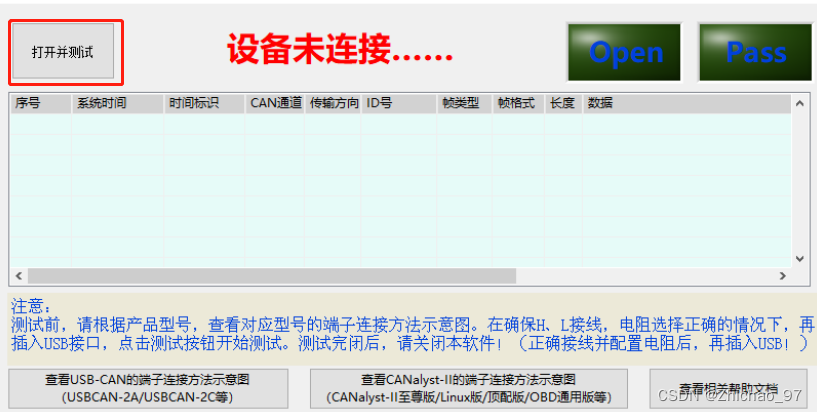
点击后:

此时CANalyst—Ⅱ会有灯光闪烁:

如果出现以下结果,请按提示检查接线、终端电阻配置,插拔 USB 重新测试:

二、手动测试步骤
1.在弹出的 USB-CAN Tool 界面菜单中,点击“设备操作-》启动设备”:


2.在接下来弹出的初始化参数对话框中,将 CAN1 通道和 CAN2 通道参数设置为相同波特率,这里将 CAN1 与 CAN2 的波特率配置为 500K,单击“确定”即可:



3.打开成功后,在界面上选择 CAN1 通道,点击“发送”按钮发送一帧数据,此时 CAN2 通道将接收一帧相同的数据,说明 CAN1 通道发送正常,CAN2 通道接收正常。

然后切换发送通道为CAN2 通道,点击“发送”按钮发送一帧数据,此时 CAN1 通道将接收一帧相同的数据,说明 CAN2 通道发送正常,CAN1 通道接收正常。

三、python收发测试
共7步:
1.读取动态链接库
2.VCI_OpenDevice 打开设备
3.VCI_InitCAN 初始化指定CAN通道
4.VCI_StartCAN 打开指定CAN通道
5.VCI_Transmit 发送数据
6.VCI_Receive 接收数据
7.VCI_CloseDevice 关闭设备
完整代码:
from ctypes import *
STATUS_OK = 1
RESERVED = 0 # 保留字段
"""1.读取动态链接库"""
# 依赖的DLL文件(存放在根目录下)
CAN_DLL_PATH = './ControlCAN.dll'
# 读取DLL文件
Can_DLL = windll.LoadLibrary(CAN_DLL_PATH)
"""2.VCI_OpenDevice 打开设备"""
# 打开设备, 一个设备只能打开一次
# return: 1=OK 0=ERROR
def connect(VCI_USB_CAN_2, DEV_INDEX):
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# RESERVED: 保留参数
ret = Can_DLL.VCI_OpenDevice(VCI_USB_CAN_2, DEV_INDEX, RESERVED)
if ret == STATUS_OK:
print('VCI_OpenDevice: 设备开启成功')
else:
print('VCI_OpenDevice: 设备开启失败')
return ret
"""3.VCI_InitCAN 初始化指定CAN通道"""
# 通道初始化参数结构
# AccCode: 过滤验收码
# AccMask: 过滤屏蔽码
# Reserved: 保留字段
# Filter: 滤波模式 0/1=接收所有类型 2=只接收标准帧 3=只接收扩展帧
# Timing0: 波特率 T0
# Timing1: 波特率 T1
# Mode: 工作模式 0=正常工作 1=仅监听模式 2=自发自收测试模式
class VCI_CAN_INIT_CONFIG(Structure):
_fields_ = [
("AccCode", c_uint),
("AccMask", c_uint),
("Reserved", c_uint),
("Filter", c_ubyte),
("Timing0", c_ubyte),
("Timing1", c_ubyte),
("Mode", c_ubyte)
]
# 过滤验收码
ACC_CODE = 0x80000000
# 过滤屏蔽码
ACC_MASK = 0xFFFFFFFF
# 滤波模式 0/1=接收所有类型
FILTER = 0
# 波特率 T0
TIMING_0 = 0x03
# 波特率 T1
TIMING_1 = 0x1C
# 工作模式 0=正常工作
MODE = 0
# 初始化通道
# return: 1=OK 0=ERROR
def init(VCI_USB_CAN_2, DEV_INDEX, can_index):
init_config = VCI_CAN_INIT_CONFIG(ACC_CODE, ACC_MASK, RESERVED, FILTER, TIMING_0, TIMING_1, MODE)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# init_config: 请求参数体
ret = Can_DLL.VCI_InitCAN(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(init_config))
if ret == STATUS_OK:
print('VCI_InitCAN: 通道 ' + str(can_index + 1) + ' 初始化成功')
else:
print('VCI_InitCAN: 通道 ' + str(can_index + 1) + ' 初始化失败')
return ret
"""4.VCI_StartCAN 打开指定CAN通道"""
# 打开通道
# return: 1=OK 0=ERROR
def start(VCI_USB_CAN_2, DEV_INDEX, can_index):
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
ret = Can_DLL.VCI_StartCAN(VCI_USB_CAN_2, DEV_INDEX, can_index)
if ret == STATUS_OK:
print('VCI_StartCAN: 通道 ' + str(can_index + 1) + ' 打开成功')
else:
print('VCI_StartCAN: 通道 ' + str(can_index + 1) + ' 打开失败')
return ret
"""5.VCI_Transmit 发送数据"""
# CAN帧结构体
# ID: 帧ID, 32位变量, 数据格式为靠右对齐
# TimeStamp: 设备接收到某一帧的时间标识, 时间标示从CAN卡上电开始计时, 计时单位为0.1ms
# TimeFlag: 是否使用时间标识, 为1时TimeStamp有效, TimeFlag和TimeStamp只在此帧为接收帧时才有意义
# SendType: 发送帧类型 0=正常发送(发送失败会自动重发, 重发时间为4秒, 4秒内没有发出则取消) 1=单次发送(只发送一次, 发送失败不会自动重发, 总线只产生一帧数据)[二次开发, 建议1, 提高发送的响应速度]
# RemoteFlag: 是否是远程帧 0=数据帧 1=远程帧(数据段空)
# ExternFlag: 是否是扩展帧 0=标准帧(11位ID) 1=扩展帧(29位ID)
# DataLen: 数据长度DLC(<=8), 即CAN帧Data有几个字节, 约束了后面Data[8]中的有效字节
# Data: CAN帧的数据, 由于CAN规定了最大是8个字节, 所以这里预留了8个字节的空间, 受DataLen约束, 如DataLen定义为3, 即Data[0]、Data[1]、Data[2]是有效的
# Reserved: 保留字段
class VCI_CAN_OBJ(Structure):
_fields_ = [
("ID", c_uint),
("TimeStamp", c_uint),
("TimeFlag", c_ubyte),
("SendType", c_ubyte),
("RemoteFlag", c_ubyte),
("ExternFlag", c_ubyte),
("DataLen", c_ubyte),
("Data", c_ubyte * 8),
("Reserved", c_ubyte * 3)
]
# 发送帧ID
TRANSMIT_ID = 0x1
# 接收帧ID
RECEIVE_ID = 0x0
# 时间标识
TIME_STAMP = 0
# 是否使用时间标识
TIME_FLAG = 0
# 发送帧类型
TRANSMIT_SEND_TYPE = 1
# 接收帧类型
RECEIVE_SEND_TYPE = 0
# 是否是远程帧
REMOTE_FLAG = 0
# 是否是扩展帧
EXTERN_FLAG = 0
# 数据长度DLC
DATA_LEN = 8
# 用来接收的帧结构体数组的长度, 适配器中为每个通道设置了2000帧左右的接收缓存区
RECEIVE_LEN = 2500
# 接收保留字段
WAIT_TIME = 0
# 要发送的帧结构体数组的长度(发送的帧数量), 最大为1000, 建议设为1, 每次发送单帧, 以提高发送效率
TRANSMIT_LEN = 1
# 发送数据
# return: 1=OK 0=ERROR
def transmit(VCI_USB_CAN_2, DEV_INDEX, can_index, TRANSMIT_DATA01, TRANSMIT_DATA02, TRANSMIT_DATA03, TRANSMIT_DATA04, TRANSMIT_DATA05, TRANSMIT_DATA06, TRANSMIT_DATA07, TRANSMIT_DATA08): # TRANSMIT_DATA01~TRANSMIT_DATA08为要发送的8个字节的数据
ubyte_array_8 = c_ubyte * 8
DATA = ubyte_array_8(TRANSMIT_DATA01, TRANSMIT_DATA02, TRANSMIT_DATA03, TRANSMIT_DATA04, TRANSMIT_DATA05, TRANSMIT_DATA06, TRANSMIT_DATA07, TRANSMIT_DATA08)
ubyte_array_3 = c_ubyte * 3
RESERVED_3 = ubyte_array_3(RESERVED, RESERVED, RESERVED)
can_obj = VCI_CAN_OBJ(TRANSMIT_ID, TIME_STAMP, TIME_FLAG, TRANSMIT_SEND_TYPE, REMOTE_FLAG, EXTERN_FLAG, DATA_LEN, DATA, RESERVED_3)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# can_obj: 请求参数体
# TRANSMIT_LEN: 发送的帧数量
ret = Can_DLL.VCI_Transmit(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), TRANSMIT_LEN)
if ret == STATUS_OK:
print('VCI_Transmit: 通道 ' + str(can_index + 1) + ' 发送数据成功')
else:
print('VCI_Transmit: 通道 ' + str(can_index + 1) + ' 发送数据成功')
"""6.VCI_Receive 接收数据"""
# 接收数据
# return: 1=OK 0=ERROR
def receive(VCI_USB_CAN_2, DEV_INDEX, can_index):
ubyte_array_8 = c_ubyte * 8
DATA = ubyte_array_8(RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED, RESERVED)
ubyte_array_3 = c_ubyte * 3
RESERVED_3 = ubyte_array_3(RESERVED, RESERVED, RESERVED)
# 参数结构参考122行
can_obj = VCI_CAN_OBJ(RECEIVE_ID, TIME_STAMP, TIME_FLAG, RECEIVE_SEND_TYPE, REMOTE_FLAG, EXTERN_FLAG, DATA_LEN, DATA, RESERVED_3)
# VCI_USB_CAN_2: 设备类型
# DEV_INDEX: 设备索引
# can_index: CAN通道索引
# can_obj: 请求参数体
# RECEIVE_LEN: 用来接收帧结构体数组的长度
# WAIT_TIME: 保留参数
ret = Can_DLL.VCI_Receive(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), RECEIVE_LEN, WAIT_TIME)
while ret != STATUS_OK:
print('VCI_Receive: 通道 ' + str(can_index + 1) + ' 接收数据失败, 正在重试')
ret = Can_DLL.VCI_Receive(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(can_obj), RECEIVE_LEN, WAIT_TIME)
else:
print('VCI_Receive: 通道 ' + str(can_index + 1) + ' 接收数据成功')
print('ID: ', can_obj.ID)
print('DataLen: ', can_obj.DataLen)
print('Data: ', list(can_obj.Data))
return ret
"""7.关闭已打开的USB-CAN适配器"""
def close(VCI_USB_CAN_2, DEV_INDEX):
Can_DLL.VCI_CloseDevice(VCI_USB_CAN_2, DEV_INDEX)
print("VCI_CloseDevice: 设备关闭成功")
if __name__ == '__main__':
# CAN卡类别为 USBCAN-2A, USBCAN-2C, CANalyst-II
VCI_USB_CAN_2 = 4
# CAN卡下标索引, 比如当只有一个USB-CAN适配器时, 索引号为0, 这时再插入一个USB-CAN适配器那么后面插入的这个设备索引号就是1, 以此类推
DEV_INDEX = 0
CAN_INDEX_1 = 0
CAN_INDEX_2 = 1
connect(VCI_USB_CAN_2, DEV_INDEX)
# 初始化CAN1
init(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1)
# 启动CAN1
start(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1)
# 初始化CAN2
init(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# 启动CAN2
start(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# CAN1发送数据
transmit(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1, 0x01, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18)
transmit(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_1, 0x03, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18)
# CAN2接收数据
receive(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
receive(VCI_USB_CAN_2, DEV_INDEX, CAN_INDEX_2)
# 关闭设备
close(VCI_USB_CAN_2, DEV_INDEX)
ControlCAN.dll文件下载地址:
ControlCAN.dll(64位)-Python文档类资源-CSDN下载
运行结果:

更具体python代码请参考这篇大佬博客:(完整版)Python读取CANalyst-II分析仪(创芯科技)接口函数_蜡笔小新历险记的博客-CSDN博客_canalyst
四、双向收发测试
如下图,我用两个CAN盒分别连接两台电脑,一台电脑用python程序发数据,另一台用USB_CAN TOOL这个软件收


(踩坑) 注意!!波特率一定要设置对!不然无法通信

波特率参数对照表如下所示:

如下图,如果收发成功,两个CAN盒的CAN1通道的灯都会亮起

五、接收复帧
将第三节中的python代码的receive方法改为如下所示,如果用继续用之前的可能会丢帧,原因是发送方发送的数据很快,导致来不及接收。
def receive(VCI_USB_CAN_2, DEV_INDEX, can_index):
receive_len = 2500
vci_can_array = VCI_CAN_OBJ * receive_len
vci_can_obj = vci_can_array(VCI_CAN_OBJ())
while True:
while Can_DLL.VCI_GetReceiveNum(VCI_USB_CAN_2, DEV_INDEX, can_index) == 0:
continue
receive_res = Can_DLL.VCI_Receive(VCI_USB_CAN_2, DEV_INDEX, can_index, byref(vci_can_obj), RECEIVE_LEN, WAIT_TIME)
# print("receive_res",receive_res)
if receive_res > 0:
for i in range(receive_res):
# print(hex(vci_can_obj[i].ID))
# print(list(vci_can_obj[i].Data))
yield hex(vci_can_obj[i].ID), list(vci_can_obj[i].Data)
else:
print("接收区缓存区为空")
开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐


 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)