【经典网络解析(七)】 ResNet | 残差模块,为什么残差模块有效,基本结构
ResNet残差模块全解析,为什么ResNet如此有效?
文章目录
1 设计初衷
我们之前讲了VGG等网络,在之前网络的研究中,研究者感觉
网络越深,分类准确率越高,但是随着网络的加深,科学家们发现分类准确率反而会下降,无论是在训练集上还是测试集上。
ResNet的作者团队发现了这种现象的真正原因是:
训练过程中网络的正、反向的信息流动不顺畅,网络没有被充分训练,他们称之为“退化”
2.网络结构
2.1 残差块
解决方式:
构建了残差模块,通过堆叠残差模块,可以构建任意深度的神经网络,而不会出现退化的现象
提出了批归一化对抗梯度消失,该方法降低了网络训练过程中对于权重初始化的依赖
H ( x ) = F ( x ) + x H(x)=F(x)+x H(x)=F(x)+x
我们网络要学习的是F(x)
F ( x ) = H ( x ) − x F(x)=H(x)-x F(x)=H(x)−x
F(x)实际上就是输出与输入的差异,所以叫做残差模块

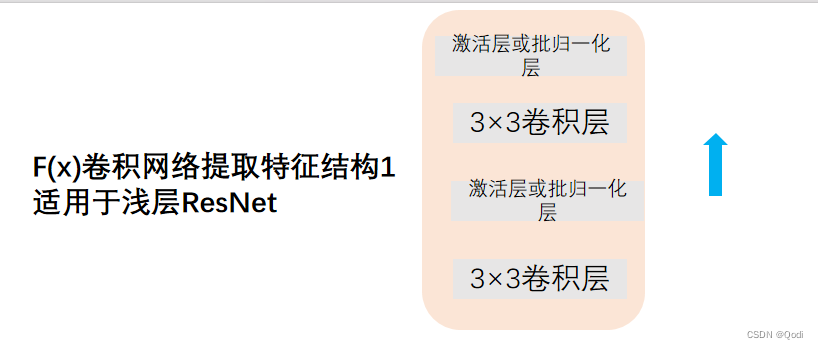
2.2 中间的卷积网络特征提取块
中间的块有两种可能
1 两层3×3卷积层

2 先1×1卷积层,再3×3卷积层,再3×3卷积层
第一个用了1×1把卷积通道降下去(减少运算量),第二个用了1×1把卷积通道再升上去(便于和输入x连接)

2.3 结构总览表格
表中展示了18层,34层,50层,101层,152层的ResNet的结构
[ ]方括号中即是我们上面讲的两个特征提取块,×几代表堆叠几个
最后经过一个全局平均池化,一个全连接层

3 为什么残差模块有效?
3.1 前向传播
1 前向传播过程中重要信息不消失
通过残差网络的设计,我们可以理解为原来的有机会信息可以维持不变,对分类有帮助的信息得到加强
能够避免卷积层堆叠存在的信息丢失
3.2 反向传播
2 反向传播中梯度可以控制不消失
在典型的残差模块中,输入数据被分为两部分,一部分通过一个或多个神经层进行变换,而另一部分直接传递给输出。这个直接传递的部分是输入数据的恒等映射,即没有变换。这意味着至少一部分的信息在经过神经网络之后保持不变。
当进行反向传播以更新神经网络参数时,梯度是根据损失函数计算的。在传统的深度神经网络中,由于多层的网络梯度相乘,梯度可以逐渐变小并导致梯度消失。但在残差模块中,由于存在恒等映射,至少一部分梯度可以直接通过跳过变换的路径传播,而不会受到变换的影响。
H ( x ) = F ( x ) + x H(x)=F(x)+x H(x)=F(x)+x
比如这个式子对x求偏导 ∂ F / ∂ x + 1 ∂F/∂x+1 ∂F/∂x+1
这时候保证了梯度至少会加1 不让梯度连乘逐渐变小
3.3 恒等映射
3,可以理解为当网络变深之后,非线性变得很强,网络很难学会简单的恒等映射,残差模块可以解决这个问题
3.4 集成模型
4 残差网络可以看做一种集成模型
可以看做很多简单或复杂的子网络的组合求和!!!

但是这样可能会造成冗余,因为其中还可能会有很多不需要的信息,这便是后来的DenseNet,会让速度提升
4.代码实现
实现的是
import torch
from torch import nn
from torch.nn import functional as F
class Residual_block(nn.Module):
def __init__(self,input_channels,output_channels,first=False):
super().__init__()
self.first=first
if first==True:
self.conv1=nn.Conv2d(input_channels,output_channels,stride=2,kernel_size=3,padding=1)
self.conv3=nn.Conv2d(input_channels,output_channels,kernel_size=1,stride=2)
else:
self.conv1=nn.Conv2d(output_channels,output_channels,kernel_size=3,padding=1)
self.bn1=nn.BatchNorm2d(output_channels)
self.conv2=nn.Conv2d(output_channels,output_channels,kernel_size=3,padding=1)
self.bn2=nn.BatchNorm2d(output_channels)
def forward(self,x):
Y=F.relu(self.bn1(self.conv1(x)))
Y=self.bn2(self.conv2(Y))
if self.first==True:
x=self.conv3(x)
Y=x+Y
return F.relu(Y)
def resnet_block(input_channels,output_channels,num_residual_block,special=False):
blk=[]
for i in range(num_residual_block):
if i==0 and special==True:
blk.append(Residual_block(input_channels,input_channels))
if i==0 and special==False:
blk.append(Residual_block(input_channels,output_channels,first=True))
else:
blk.append(Residual_block(output_channels,output_channels))
return blk
b1=nn.Sequential(
nn.Conv2d(kernel_size=7,in_channels=3,out_channels=64,stride=2,padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3,stride=2,padding=1),
)
R1=Residual_block(64,64)
x=torch.ones(1,3,224,224)
for layer in b1:
x=layer(x)
b18_2=nn.Sequential(*resnet_block(64,64,2,special=True))
b18_3=nn.Sequential(*resnet_block(64,128,2))
b18_4=nn.Sequential(*resnet_block(128,256,2))
b18_5=nn.Sequential(*resnet_block(256,512,2))
b34_2=nn.Sequential(*resnet_block(64,64,3,special=True))
b34_3=nn.Sequential(*resnet_block(64,128,4))
b34_4=nn.Sequential(*resnet_block(128,256,6))
b34_5=nn.Sequential(*resnet_block(256,512,3))
#Resnet-18
Resnet_18=nn.Sequential(b1,b18_2,b18_3,b18_4,b18_5,nn.AdaptiveAvgPool2d((1,1)),nn.Flatten(),nn.Linear(512,10))
#Resnet-34
Resnet_18=nn.Sequential(b1,b34_2,b34_3,b34_4,b34_5,nn.AdaptiveAvgPool2d((1,1)),nn.Flatten(),nn.Linear(512,10))

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐


 6
6 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)