python红绿灯检测opencv识别红绿灯信号灯检测
python红绿灯检测opencv识别红绿灯信号灯检测交通信号灯的检测与识别是无人驾驶与辅助驾驶必不可少的一部分,其识别精度直接关乎智能驾驶的安全。一般而言,在实际的道路场景中采集的交通信号灯图像具有复杂的背景,且感兴趣的信号灯区域只占很少的一部分。针对这些难点,国内外的众多研究者提出了相应的解决方案。总的来说,大多基于传统的图像处理方法;但目前也有用强学习能力的卷积神经网络去进行识别,但这类方法
python红绿灯检测opencv识别红绿灯信号灯检测
交通信号灯的检测与识别是无人驾驶与辅助驾驶必不可少的一部分,其识别精度直接关乎智能驾驶的安全。一般而言,在实际的道路场景中采集的交通信号灯图像具有复杂的背景,且感兴趣的信号灯区域只占很少的一部分。针对这些难点,国内外的众多研究者提出了相应的解决方案。总的来说,大多基于传统的图像处理方法;但目前也有用强学习能力的卷积神经网络去进行识别,但这类方法往往需要大量的训练样本避免过拟合的风险。截至目前的大多数方法都是在各种颜色空间中利用信号灯颜色的先验进行分割得到兴趣区域,然后再通过信号灯所特有的形状特征和角点特征等进行进一步的判定。比如,Masako Omachi等人提出在RGB色彩空间分割交通信号灯,使用HOUGH变换检测分割出的信号灯所在的圆形区域;徐成等提出在Lab色彩空间分割交通信号灯,使用模板匹配的方法识别交通信号灯的状态;谷明琴等则在HSV色彩空间中使用颜色直方图统计图像的H分量,确定交通信号灯的类型。本项目将基于传统的图像处理算法来进行交通信号灯的识别,重点介绍核心技术。
待检测图:

检测代码:
import cv2
import random
import numpy as np
from enum import Enum
from detectColor import detectColor
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
class TLState(Enum):
red = 1
yellow = 2
green = 3
red_yellowArrow = 4
red_greenArrow = 5
green_yellowArrow = 6
green_greenArrow = 7
redArrow = 8
yellowArrow = 9
greenArrow = 10
flashingYellowArrow = 11
class TLType(Enum):
regular = 0
five_lights = 1
four_lights = 2
def imgResize(image, height, inter = cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
r = height / float(h)
dim = (int(w * r), height)
# resize the image
resized = cv2.resize(image, dim, interpolation = inter)
# return the resized image
return resized
def detectState(image, TLType):
image = imgResize(image, 200)
(height, width) = image.shape[:2]
output = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 霍夫圆环检测
circles = cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,1,20,
param1=50,param2=30,minRadius=15,maxRadius=30)
overallState = 0
stateArrow = 0
stateSolid = 0
if circles is not None:
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
if i[1] < i[2]:
i[1] = i[2]
roi = image[(i[1]-i[2]):(i[1]+i[2]),(i[0]-i[2]):(i[0]+i[2])]
color = detectColor(roi)
if color > 0:
if TLType == 1 and i[0] < width/2 and i[1] > height/3:
stateArrow = color
elif TLType == 2:
stateArrow = color
if i[1] > height/2 and i[1] < height/4*3:
stateArrow = color + 2
else:
stateSolid = color
if TLType == 1:
overallState = stateArrow + stateSolid + 1
elif TLType == 2:
overallState = stateArrow + 7
else:
overallState = stateSolid
return overallState
def plot_light_result(images):
for i, image in enumerate(images):
plt.subplot(1, len(images), i+1)
lena = mpimg.imread(image)
label = TLState(detectState(cv2.imread(image),TLType.regular.value)).name
plt.title(label)
plt.imshow(lena)
plt.show()
light_path = ["images/red.jpg","images/green.png", "images/yellow.png"]
random.shuffle(light_path)
plot_light_result(light_path)
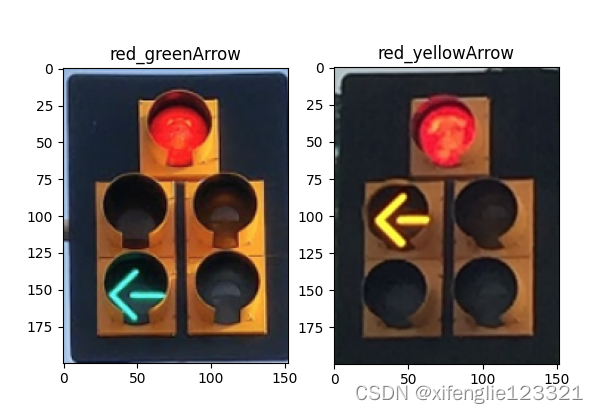
def plot_arrow_result(images):
for i, image in enumerate(images):
plt.subplot(1, len(images), i+1)
lena = mpimg.imread(image)
label = TLState(detectState(cv2.imread(image),TLType.five_lights.value)).name
plt.title(label)
plt.imshow(imgResize(lena, 200))
plt.show()
arrow_path = ["images/red_greenarrow.png", "images/red_yellowarrow.png"]
random.shuffle(arrow_path)
plot_arrow_result(arrow_path)
检测结果:


项目下载:
 https://download.csdn.net/download/xifenglie123321/85322824
https://download.csdn.net/download/xifenglie123321/85322824
开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 2
2 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)