ROS1可视化利器---Webviz
对于ROS1而言,rqt和plotjuggler是我们最常用的工具,这两个工具:rqt中嵌入了很多有用的小工具,但是它需要播放离线包,没有办法对离线包进行实时的分析。而plotjuggler支持对离线bag包进行分析,但是不支持可视化的工具,这两个各有千秋。而近年来,有更多的工作开始落实在可视化上。
0. 简介
对于ROS1而言,rqt和plotjuggler是我们最常用的工具,这两个工具:rqt中嵌入了很多有用的小工具,但是它需要播放离线包,没有办法对离线包进行实时的分析。而plotjuggler支持对离线bag包进行分析,但是不支持可视化的工具,这两个各有千秋。而近年来,有更多的工作开始落实在可视化上。
1. SLAMer常用的可视化开源库
- opengl:Open Graphics Library,译名:开放图形库或者“开放式图形库”。是用于渲染2D、3D矢量图形的跨语言、跨平台的应用程序编程接口(API)。即为可视化开发API,强项在于交互功能。
- Pangolin是SLAM常用的库之一,主要用于SLAM系统的可视化。它是基于OpenGL的,主要优势在于使用比OpenGL简单。
- PlotJuggler:时序数据可视化工具。
- Webviz:是由 cruise 开发的一个data replay工具。https://webviz.io/
- Foxglove:webviz开发人员从cruise 独立了出来开发了foxglove:https://foxglove.dev/
2. Webviz
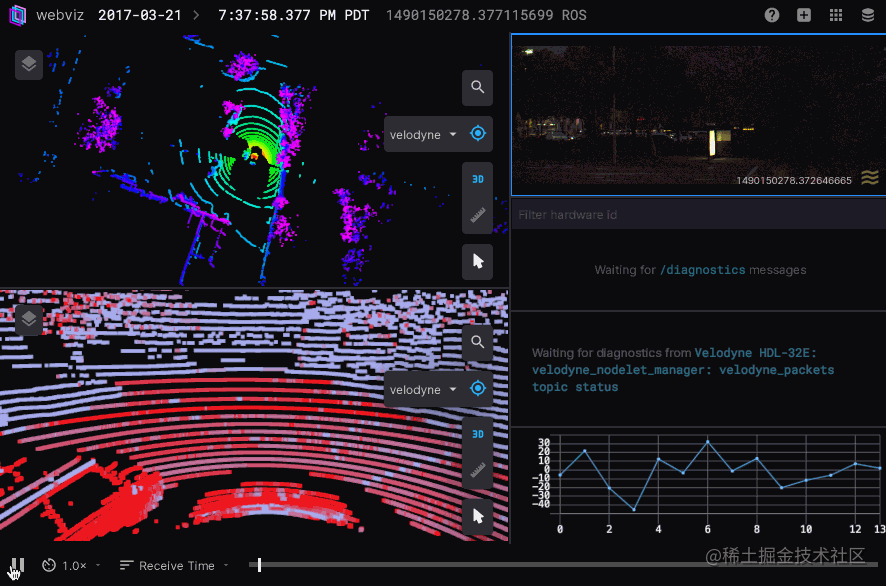
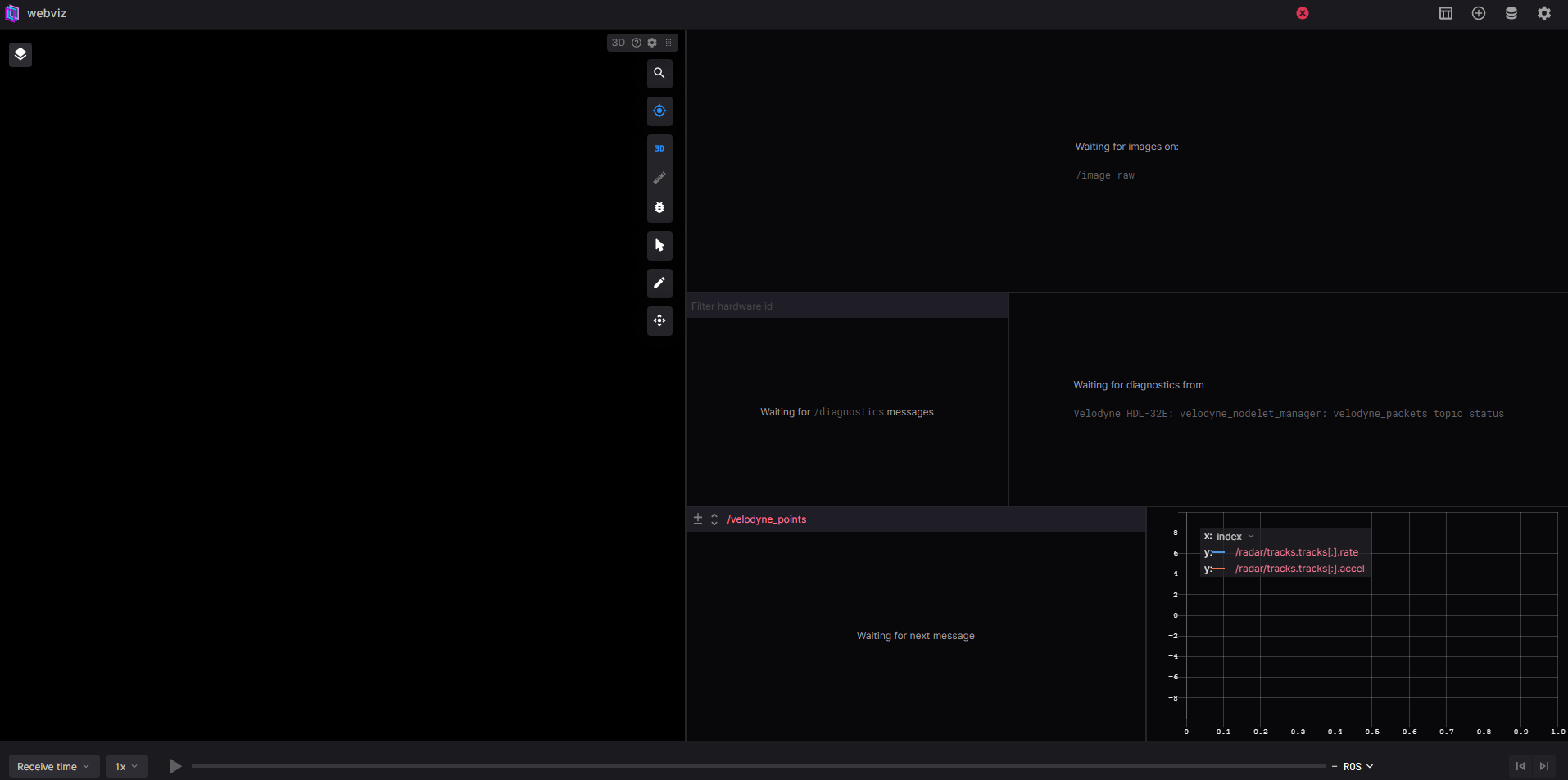
对于这一章讲的Webviz,我们知道rviz是ROS中最常用的可视化软件,作者将rviz的功能搬到了web页面上,可以通过浏览器完成数据的显示,称之为Webviz。同时Webviz还支持离线安装。并将程序运行在本地,直接将bag包拖到里面即可观察激光、视觉、以及各类信息。
Webviz-本地运行视频](https://player.bilibili.com/player.html?aid=455309080)(image-https://i-blog.csdnimg.cn/blog_migrate/1d579192f493a402f15e9fc06700d6e8.jpeg)(title-Webviz-%E6%9C%AC%E5%9C%B0%E8%BF%90%E8%A1%8C%E8%A7%86%E9%A2%91)
2.1 Webviz安装
作者建议使用托管版本的Webviz,它可以连接到您的rosbridge_server或从您的S3/GCS bucket流式传输bag数据。这样,您将始终使用最新版本的Webviz。
然而,有时托管版本很不方便,因为在国内访问该网站较慢,不太建议直接使用官网的web机器人流式传输数据。下面我们来看下怎么在本地部署。
2.1.1 安装rosbridge_suite
Webviz和ROS之间是通过rosbridge_suite进行数据传递,如果要实时显示(不是用bag),则必须安装。
sudo apt-get install ros-<rosdistro>-rosbridge-suite
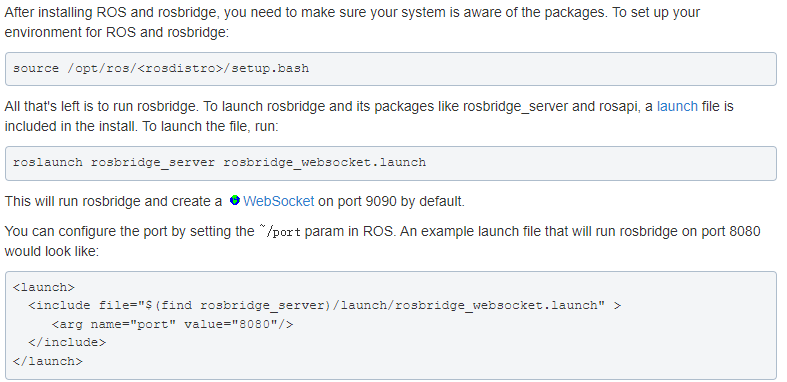
运行,launch中默认的websocket端口为9090,不用去更改,因为目前Webviz连接默认的端口就是9090。
roslaunch rosbridge_server rosbridge_websocket.launch
2.1.2 安装 nvm
nvm 是nodejs的版本管理器,类似 Anaconda(python的版本管理器)
#预备工作
sudo apt-get update
sudo apt-get install build-essential libssl-dev
#获取脚本并安装
#方法一
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
#方法二
wget -qO- https://raw.githubusercontent.com/nvm-sh/nvm/v0.35.3/install.sh | bash
#更换源为淘宝镜像
#方法一(临时)
NVM_NODEJS_ORG_MIRROR=https://npm.taobao.org/mirrors/node
#方法二(永久)
#在 ~/.bashrc 中添加下列语句
export NVM_NODEJS_ORG_MIRROR=https://npm.taobao.org/mirrors/node
2.1.3 安装nodejs
直接使用nvm进行node安装和版本控制,Webviz项目暂时仅支持 node10 和 node11,高版本的 node 会出现编译错误。
#查看可安装的node版本
nvm ls-remote
#安装指定版本的node
nvm install 10.19.0
#查看当前的node版本
nvm current
#查看已安装的node版本
nvm list
#选择需要的node版本
nvm use 10.19.0
2.1.4 换源加速
#更换npm源为淘宝的源
npm config set registry https://registry.npm.taobao.org
#检查是否配置成功
npm config get registry
2.1.5 编译代码
git clone https://github.com/cruise-automation/webviz.git
cd webviz/
#建议先手动安装node-sass
npm config set sass_binary_site https://npm.taobao.org/mirrors/node-sass/
npm install node-sass
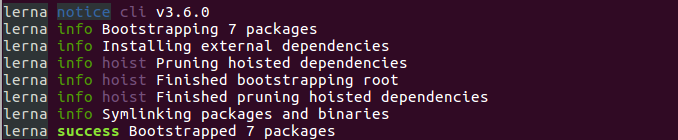
#执行脚本安装项目依赖
npm run bootstrap
2.1.6 编译项目
npm run build

2.2 使用Webviz
-
运行rosbridge_websocket
roslaunch rosbridge_server rosbridge_websocket.launch -
在webviz根目录执行启动
npm run docs -
打开谷歌浏览器,登录地址可以访问多个
127.0.0.1:8080
3. 参考文献
https://github.com/cruise-automation/webviz
https://www.cnblogs.com/FUJI-Mount/p/12695792.html
…详情请参照古月居

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)