C#实现MODBUS RTU通信协议类库及测试程序
本文还有配套的精品资源,点击获取简介:MODBUS RTU协议作为工业自动化的重要组成部分,基于C#开发的MODBUS RTU类库能够帮助开发者与硬件设备进行交互。该类库提供了读写保持寄存器和线圈的功能,测试程序则便于验证类库功能和协议解析。核心组件包括MODBUS指令构建器、CRC校验、串口通信接口、事件驱动模型、异常处理及易用性API。通过解压文件,开发者能够进一步了...

简介:MODBUS RTU协议作为工业自动化的重要组成部分,基于C#开发的MODBUS RTU类库能够帮助开发者与硬件设备进行交互。该类库提供了读写保持寄存器和线圈的功能,测试程序则便于验证类库功能和协议解析。核心组件包括MODBUS指令构建器、CRC校验、串口通信接口、事件驱动模型、异常处理及易用性API。通过解压文件,开发者能够进一步了解和使用该类库。 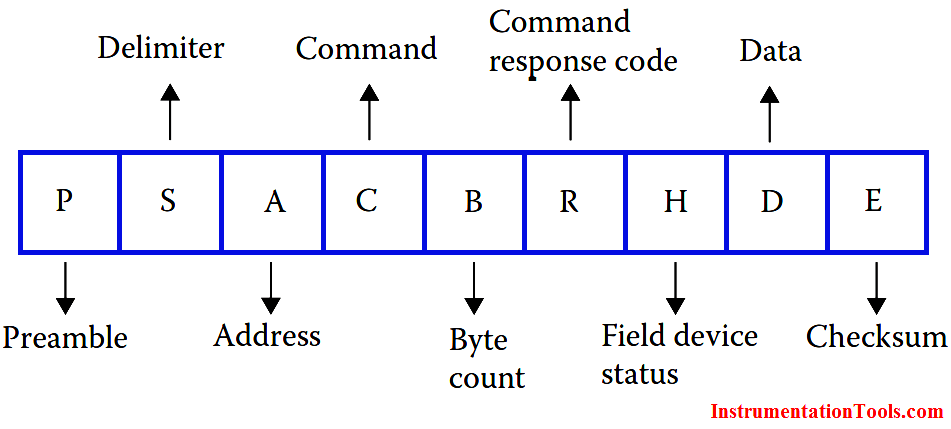
1. MODBUS RTU协议简介
MODBUS RTU协议概述
MODBUS RTU(Remote Terminal Unit)是一种在串行通信中广泛使用的协议,特别是在工业自动化领域。它基于主从架构,允许主机(Master)与多个从机(Slave)进行数据交换。RTU模式以其高效的数据传输和简单的实现特点而受到青睐。
MODBUS RTU帧结构
MODBUS RTU协议的数据帧格式如下:
| 设备地址 | 功能码 | 数据 | CRC校验 | |----------|--------|------|---------|
- 设备地址 :用于标识网络中的从机设备,每个从机都有唯一的地址。
- 功能码 :指示请求的操作类型,如读取寄存器、写入寄存器等。
- 数据 :根据功能码的不同,数据部分会包含不同的信息,如寄存器地址、寄存器数量等。
- CRC校验 :用于检测帧错误,确保数据的完整性。
MODBUS RTU的应用场景
MODBUS RTU协议因其简洁和高效,在很多工业控制场合被用作设备间的通信协议。例如,智能仪表、PLC(可编程逻辑控制器)、HMI(人机界面)等设备常常通过MODBUS RTU进行数据交换。它不仅能实现数据采集,还能控制设备状态,是工业4.0不可或缺的一部分。
持续性与可扩展性
在编写MODBUS RTU相关软件时,开发者需要考虑到程序的持续性与可扩展性。随着技术的发展,新功能的需求会不断出现,因此在设计类库时应预留接口和扩展点,以适应未来的需求变化。
结语
MODBUS RTU协议是工业通信中的重要组成部分,掌握其原理和实现方式对于工程师来说至关重要。接下来,我们将深入探讨如何使用C#语言实现MODBUS RTU协议,并提供一个功能强大且易于扩展的类库。
2. C#类库实现
2.1 MODBUS RTU协议的C#封装
2.1.1 C#中数据类型的处理
在C#中,处理MODBUS RTU协议时,我们首先需要定义一系列的数据类型以适应MODBUS数据帧的结构。MODBUS RTU协议的数据帧主要由地址、功能码、数据和校验四部分组成。在C#中,我们可以使用内置的 byte 数组来表示这些信息,因为MODBUS RTU协议本质上是基于字节流传输的。
public class ModbusFrame
{
public byte SlaveAddress { get; set; }
public byte FunctionCode { get; set; }
public byte[] Data { get; set; }
public ushort CRC { get; set; }
// 构造函数
public ModbusFrame(byte slaveAddress, byte functionCode, byte[] data)
{
SlaveAddress = slaveAddress;
FunctionCode = functionCode;
Data = data;
CRC = CalculateCRC(data);
}
// CRC校验计算
private ushort CalculateCRC(byte[] data)
{
ushort crc = 0xFFFF;
foreach (byte b in data)
{
crc ^= b;
for (int i = 0; i < 8; i++)
{
if ((crc & 0x0001) != 0)
crc >>= 1;
else
crc = (ushort)((crc >> 1) ^ 0xA001);
}
}
return crc;
}
}
在这个示例中,我们定义了一个 ModbusFrame 类来表示一个MODBUS数据帧。该类包含从站地址( SlaveAddress )、功能码( FunctionCode )、数据( Data )和CRC校验码( CRC )。我们还实现了一个 CalculateCRC 方法来计算数据的CRC校验码。
参数说明
-
SlaveAddress:从站地址,用于标识MODBUS设备。 -
FunctionCode:功能码,指示请求的操作类型。 -
Data:数据,包含具体的操作数据。 -
CRC:校验码,用于错误检测。
逻辑分析
在 CalculateCRC 方法中,我们首先将 crc 变量初始化为 0xFFFF ,然后对数据数组中的每个字节进行遍历。对于每个字节,我们将其与 crc 异或,然后进行一系列的移位和判断操作来更新 crc 的值。最终,我们返回计算出的CRC校验码。
2.1.2 MODBUS RTU帧结构的定义
MODBUS RTU协议的帧结构非常简洁,包括从站地址、功能码、数据和CRC校验码。每个帧的起始和结束没有特殊的标志,因此接收端需要根据定时器来确定帧的边界。以下是MODBUS RTU帧的结构定义:
+--------+--------+----------+--------+--------+
| Slave | Function| Data | CRC |
| Address| Code | | Hi | Lo |
+--------+--------+----------+--------+--------+
2.1.3 C#类库的设计原则
在设计MODBUS RTU协议的C#类库时,我们应该遵循一些基本原则来确保类库的可用性和可维护性:
- 单一职责原则 :每个类应该只负责一项功能,例如,一个类专门用于处理MODBUS帧的构造和解析,另一个类专门用于处理通信。
- 可扩展性 :设计时应考虑未来可能的功能扩展,避免过度优化导致代码难以修改。
- 代码清晰性 :代码应该易于阅读和理解,使用清晰的命名约定和注释。
- 异常处理 :合理使用异常处理机制来处理可能出现的错误情况。
- 线程安全 :如果类库将被用于多线程环境,确保实现是线程安全的。
2.2 C#类库的核心功能实现
2.2.1 封装通信协议的细节
在C#类库中,我们需要封装MODBUS RTU协议的细节,使得用户不需要了解协议的具体实现即可使用。这通常包括以下几个步骤:
- 构建请求帧 :根据用户提供的信息构建MODBUS RTU请求帧。
- 发送请求 :将请求帧通过串口或其他通信方式发送给MODBUS设备。
- 接收响应 :从MODBUS设备接收响应帧。
- 解析响应 :解析响应帧并提取所需的数据。
- 异常处理 :处理可能发生的通信错误。
public class ModbusClient
{
private SerialPort _port;
public ModbusClient(string portName)
{
_port = new SerialPort(portName);
}
public byte[] ReadHoldingRegisters(byte slaveAddress, ushort startAddress, ushort numRegisters)
{
// 构建请求帧
var request = new ModbusFrame(slaveAddress, 0x03, // 功能码0x03代表读保持寄存器
BuildReadRegistersData(startAddress, numRegisters));
// 发送请求
_port.WriteLine(request.ToString());
// 接收响应
var responseBytes = _port.ReadExisting();
// 解析响应
return ParseReadRegistersResponse(responseBytes);
}
// 构建读寄存器数据的方法
private byte[] BuildReadRegistersData(ushort startAddress, ushort numRegisters)
{
// ... 实现构建数据部分的代码
}
// 解析读寄存器响应的方法
private byte[] ParseReadRegistersResponse(byte[] responseBytes)
{
// ... 实现解析响应的代码
}
}
参数说明
-
portName:串口名称,用于标识通信端口。
逻辑分析
在 ModbusClient 类中,我们定义了一个 ReadHoldingRegisters 方法来读取保持寄存器的值。该方法首先构建请求帧,然后发送请求,接收响应,并解析响应。这个方法封装了所有通信协议的细节,使得用户可以通过简单的调用来完成读取操作。
2.2.2 实现数据封装与解封装
数据的封装与解封装是MODBUS RTU协议实现中的关键部分。我们需要确保数据在发送前被正确地封装成MODBUS帧,并在接收到响应后能够正确地解析出所需的数据。
// 封装数据为MODBUS帧
public byte[] BuildModbusFrame(byte slaveAddress, byte functionCode, byte[] data)
{
return new ModbusFrame(slaveAddress, functionCode, data).ToByteArray();
}
// 解析MODBUS响应帧
public ModbusFrame ParseModbusFrame(byte[] frameBytes)
{
return new ModbusFrame(frameBytes);
}
2.2.3 错误处理和异常机制
在实现MODBUS RTU通信时,我们需要考虑可能出现的各种错误情况,并通过异常机制来处理这些错误。
public void SendRequest(ModbusFrame request)
{
try
{
// 发送请求帧
// ...
}
catch (TimeoutException)
{
throw new ModbusCommunicationException("发送请求超时。");
}
catch (Exception ex)
{
throw new ModbusCommunicationException("发生未知错误。", ex);
}
}
在 SendRequest 方法中,我们使用 try-catch 块来捕获可能发生的异常。如果出现超时,我们抛出一个自定义的 ModbusCommunicationException ,携带具体的错误信息。
2.3 C#类库的扩展性与维护
2.3.1 类库的版本控制和更新
为了保证类库的可维护性,我们需要对类库进行版本控制,并在每次更新时记录变更日志。这可以通过Git等版本控制系统来实现。
2.3.2 提供接口以支持自定义功能
为了提高类库的灵活性,我们应该提供一些接口供用户自定义功能。例如,用户可以实现自己的CRC校验方法或者自定义通信协议。
public interface IModbusFrame
{
byte[] ToByteArray();
byte[] FromByteArray(byte[] bytes);
}
public class CustomModbusFrame : ModbusFrame, IModbusFrame
{
// 自定义实现
}
2.3.3 代码的文档注释和示例代码
为了帮助用户更好地理解和使用类库,我们应该提供详细的文档注释和示例代码。
/// <summary>
/// MODBUS RTU帧的表示
/// </summary>
public class ModbusFrame
{
// ... 类成员和方法的详细说明
}
通过上述方法,我们确保了类库的可用性和可维护性,为用户提供了一个强大且灵活的MODBUS RTU通信解决方案。在后续的章节中,我们将进一步探讨如何实现读写保持寄存器和线圈的功能。
3. 读写保持寄存器功能
在本章节中,我们将深入探讨MODBUS RTU协议中保持寄存器的读写操作。保持寄存器通常用于存储需要长期保持的数据,例如配置参数或控制命令。我们将详细介绍如何通过C#类库实现这些操作,并展示如何进行测试与验证。
3.1 保持寄存器的读取操作
3.1.1 读取保持寄存器的命令结构
读取保持寄存器的操作是MODBUS RTU协议中最常见的操作之一。为了读取保持寄存器,我们需要构建一个特定格式的请求帧。该请求帧通常包含设备地址、功能码、起始地址、寄存器数量等信息。功能码0x03用于读取保持寄存器。
3.1.2 读取操作的流程控制
读取保持寄存器的操作流程可以分为以下步骤:
- 构建请求帧:根据MODBUS RTU协议的要求,构造包含必要信息的请求帧。
- 发送请求帧:通过串行通信接口发送请求帧到从设备。
- 接收响应帧:等待并接收从设备返回的响应帧。
- 解析响应帧:解析响应帧以提取寄存器的值。
3.1.3 C#类库中读取功能的实现
在C#类库中,我们可以定义一个方法来实现读取保持寄存器的功能。以下是一个示例代码:
public byte[] ReadHoldingRegisters(byte slaveAddress, ushort startAddress, ushort registerCount)
{
// 构建请求帧
byte[] requestFrame = new byte[8];
requestFrame[0] = slaveAddress;
requestFrame[1] = 0x03; // 功能码0x03
requestFrame[2] = (byte)(startAddress >> 8);
requestFrame[3] = (byte)startAddress;
requestFrame[4] = (byte)(registerCount >> 8);
requestFrame[5] = (byte)registerCount;
// 计算CRC校验码
ushort crc = Crc16.Calculate(requestFrame, 0, 6);
requestFrame[6] = (byte)(crc >> 8);
requestFrame[7] = (byte)crc;
// 发送请求帧
SendFrame(requestFrame);
// 接收响应帧
byte[] responseFrame = ReceiveFrame();
// 解析响应帧
if (responseFrame[0] != slaveAddress || responseFrame[1] != 0x03)
{
throw new Exception("Invalid response frame");
}
ushort crcResponse = (ushort)((responseFrame[2] << 8) | responseFrame[3]);
if (crc != crcResponse)
{
throw new Exception("CRC check failed");
}
ushort byteCount = responseFrame[4];
ushort[] registers = new ushort[byteCount / 2];
for (int i = 0; i < byteCount / 2; i++)
{
registers[i] = (ushort)((responseFrame[5 + i * 2] << 8) | responseFrame[6 + i * 2]);
}
return responseFrame;
}
在这个方法中,我们首先构建请求帧,然后计算CRC校验码,并发送请求帧。之后,我们接收并解析响应帧,如果响应帧的有效性检查通过,我们将提取并返回寄存器的值。
3.2 保持寄存器的写入操作
3.2.1 写入保持寄存器的命令结构
写入保持寄存器的操作同样重要。功能码0x06用于写入单个保持寄存器,而功能码0x10用于写入多个保持寄存器。写入操作的请求帧包含设备地址、功能码、起始地址、寄存器值等信息。
3.2.2 写入操作的流程控制
写入保持寄存器的操作流程可以分为以下步骤:
- 构建请求帧:根据MODBUS RTU协议的要求,构造包含必要信息的请求帧。
- 发送请求帧:通过串行通信接口发送请求帧到从设备。
- 接收响应帧:等待并接收从设备返回的响应帧。
- 验证操作结果:解析响应帧以验证写入操作是否成功。
3.2.3 C#类库中写入功能的实现
在C#类库中,我们可以定义一个方法来实现写入保持寄存器的功能。以下是一个示例代码:
public bool WriteHoldingRegister(byte slaveAddress, ushort startAddress, ushort value)
{
// 构建请求帧
byte[] requestFrame = new byte[8];
requestFrame[0] = slaveAddress;
requestFrame[1] = 0x06; // 功能码0x06
requestFrame[2] = (byte)(startAddress >> 8);
requestFrame[3] = (byte)startAddress;
requestFrame[4] = (byte)(value >> 8);
requestFrame[5] = (byte)value;
// 计算CRC校验码
ushort crc = Crc16.Calculate(requestFrame, 0, 6);
requestFrame[6] = (byte)(crc >> 8);
requestFrame[7] = (byte)crc;
// 发送请求帧
SendFrame(requestFrame);
// 接收响应帧
byte[] responseFrame = ReceiveFrame();
// 验证操作结果
if (responseFrame[0] != slaveAddress || responseFrame[1] != 0x06)
{
throw new Exception("Invalid response frame");
}
ushort crcResponse = (ushort)((responseFrame[2] << 8) | responseFrame[3]);
if (crc != crcResponse)
{
throw new Exception("CRC check failed");
}
return true;
}
在这个方法中,我们首先构建请求帧,然后计算CRC校验码,并发送请求帧。之后,我们接收并验证响应帧,如果响应帧的有效性检查通过,我们返回true表示写入操作成功。
3.3 读写操作的测试与验证
3.3.1 测试环境的搭建
为了测试读写保持寄存器的功能,我们需要搭建一个测试环境。这通常包括一个MODBUS从设备模拟器和一个串行通信接口。我们可以使用串口调试助手或其他软件来模拟MODBUS从设备。
3.3.2 测试用例的设计与执行
设计测试用例时,我们需要考虑不同的情况,例如读取和写入不同的寄存器地址、处理响应超时等。执行测试用例时,我们需要记录操作结果,并验证它们是否符合预期。
3.3.3 性能评估与结果分析
在测试完成后,我们需要对测试结果进行性能评估。我们可以分析响应时间和成功率,以及在不同负载下的性能表现。此外,我们还可以通过性能评估来识别潜在的性能瓶颈,并提出相应的优化策略。
以上内容涵盖了保持寄存器的读取和写入操作的详细步骤,包括命令结构、流程控制以及C#类库的实现方式。同时,我们也讨论了测试与验证的流程,包括测试环境的搭建、测试用例的设计与执行,以及性能评估与结果分析。通过这些内容,读者应该能够理解和实现MODBUS RTU协议中的保持寄存器读写操作,并进行有效的测试与验证。
4. 读写线圈功能
4.1 线圈状态的读取操作
在本章节中,我们将深入探讨如何使用C#类库实现MODBUS RTU协议中的线圈状态读取操作。线圈通常用于表示离散的输出,如继电器的开启/关闭状态。MODBUS RTU协议提供了一种机制,允许主设备读取从设备中一组线圈的状态。我们将从命令结构开始,逐步分析如何在C#中封装这一功能,并实现流程控制。
4.1.1 读取线圈状态的命令结构
在MODBUS RTU协议中,读取线圈状态的操作通常使用功能码0x01来标识。请求帧结构如下:
| 设备地址 | 功能码 | 起始地址高字节 | 起始地址低字节 | 数量高字节 | 数量低字节 | CRC校验 | |----------|--------|----------------|----------------|------------|------------|---------|
4.1.2 读取操作的流程控制
读取线圈状态的操作流程可以分为以下几个步骤:
- 构造请求帧:根据命令结构,将设备地址、功能码、起始地址、数量以及CRC校验组装成一个完整的请求帧。
- 发送请求帧:通过串口或其他通信接口发送请求帧到MODBUS从设备。
- 接收响应帧:从设备接收到请求后,会返回一个响应帧,其中包含了所请求线圈状态的信息。
- 解析响应帧:解析响应帧中的数据,提取出线圈状态。
- 异常处理:如果在通信过程中出现任何异常,比如CRC校验失败或响应超时,则需要进行相应的异常处理。
4.1.3 C#类库中读取功能的实现
在C#类库中,我们可以创建一个名为 ModbusMaster 的类,其中包含一个名为 ReadCoils 的方法来实现读取线圈状态的功能。以下是该方法的一个简化的实现示例:
public class ModbusMaster
{
// 省略其他成员和方法...
public bool[] ReadCoils(byte deviceAddress, ushort startAddress, ushort coilCount)
{
// 构造请求帧
byte[] requestFrame = BuildReadCoilsRequestFrame(deviceAddress, startAddress, coilCount);
// 发送请求帧
byte[] responseFrame = SendRequestFrame(requestFrame);
// 解析响应帧
return ParseReadCoilsResponse(responseFrame);
}
private byte[] BuildReadCoilsRequestFrame(byte deviceAddress, ushort startAddress, ushort coilCount)
{
// 省略具体实现...
}
private byte[] SendRequestFrame(byte[] requestFrame)
{
// 省略具体实现...
}
private bool[] ParseReadCoilsResponse(byte[] responseFrame)
{
// 省略具体实现...
}
}
代码逻辑解读分析
-
ReadCoils方法接收三个参数:设备地址、起始地址和数量。 -
BuildReadCoilsRequestFrame方法根据请求参数构造请求帧。 -
SendRequestFrame方法发送请求帧,并接收响应帧。 -
ParseReadCoilsResponse方法解析响应帧,并返回线圈状态数组。
参数说明
-
deviceAddress: 从设备的地址。 -
startAddress: 起始线圈的地址。 -
coilCount: 要读取的线圈数量。
4.2 线圈状态的写入操作
4.2.1 写入线圈状态的命令结构
写入线圈状态的操作使用功能码0x05来标识。请求帧结构如下:
| 设备地址 | 功能码 | 起始地址高字节 | 起始地址低字节 | 状态字节高字节 | 状态字节低字节 | CRC校验 | |----------|--------|----------------|----------------|----------------|----------------|---------|
4.2.2 写入操作的流程控制
写入线圈状态的操作流程类似于读取操作,但是响应帧的结构不同。请求帧中包含了要写入的状态信息,响应帧通常是确认信息,表示写入成功或失败。
4.2.3 C#类库中写入功能的实现
在C#类库中,我们可以创建一个名为 ModbusMaster 的类,其中包含一个名为 WriteCoils 的方法来实现写入线圈状态的功能。以下是该方法的一个简化的实现示例:
public class ModbusMaster
{
// 省略其他成员和方法...
public bool WriteCoils(byte deviceAddress, ushort startAddress, bool[] coilStates)
{
// 构造请求帧
byte[] requestFrame = BuildWriteCoilsRequestFrame(deviceAddress, startAddress, coilStates);
// 发送请求帧
byte[] responseFrame = SendRequestFrame(requestFrame);
// 解析响应帧
return ParseWriteCoilsResponse(responseFrame);
}
private byte[] BuildWriteCoilsRequestFrame(byte deviceAddress, ushort startAddress, bool[] coilStates)
{
// 省略具体实现...
}
private byte[] SendRequestFrame(byte[] requestFrame)
{
// 省略具体实现...
}
private bool ParseWriteCoilsResponse(byte[] responseFrame)
{
// 省略具体实现...
}
}
代码逻辑解读分析
-
WriteCoils方法接收三个参数:设备地址、起始地址和线圈状态数组。 -
BuildWriteCoilsRequestFrame方法根据请求参数构造请求帧。 -
SendRequestFrame方法发送请求帧,并接收响应帧。 -
ParseWriteCoilsResponse方法解析响应帧,并返回写入成功或失败的布尔值。
参数说明
-
deviceAddress: 从设备的地址。 -
startAddress: 起始线圈的地址。 -
coilStates: 要写入的线圈状态数组。
4.3 读写操作的案例分析
4.3.1 实际应用场景的案例描述
在实际应用中,例如在一个工业控制系统中,我们可能需要远程控制一组继电器。这些继电器的状态可以通过MODBUS RTU协议的线圈状态读写功能来控制。例如,我们可以读取某个区域的温度传感器状态,并根据温度值控制加热器的开关。
4.3.2 读写操作的实现细节
以下是一个简化的示例,展示了如何使用我们之前定义的 ModbusMaster 类来读取和写入线圈状态:
ModbusMaster modbusMaster = new ModbusMaster();
// 读取线圈状态
ushort startAddress = 0x0000;
ushort coilCount = 10;
bool[] coilStatus = modbusMaster.ReadCoils(deviceAddress, startAddress, coilCount);
// 写入线圈状态
ushort startAddressToWrite = 0x0005;
bool[] newCoilStates = new bool[10] { true, false, true, true, false, true, true, false, false, true };
bool writeSuccess = modbusMaster.WriteCoils(deviceAddress, startAddressToWrite, newCoilStates);
// 输出结果
Console.WriteLine($"Read Coil Status: {string.Join(", ", coilStatus)}");
Console.WriteLine($"Write Coil Status: {writeSuccess}");
4.3.3 案例效果的评估与总结
在这个案例中,我们通过 ModbusMaster 类的 ReadCoils 和 WriteCoils 方法实现了对线圈状态的读取和写入操作。通过控制台输出,我们可以看到读取到的线圈状态和写入操作是否成功。这种方法可以用于更复杂的工业控制场景,例如,根据传感器数据自动调节生产线上的机器设备。
通过本章节的介绍,我们了解了如何在C#中封装和实现MODBUS RTU协议的读写线圈功能。我们深入探讨了命令结构、流程控制以及C#类库的具体实现。最后,通过一个实际应用场景的案例分析,我们展示了如何将这些功能应用于实际问题的解决中。
5. 测试程序作用
5.1 测试程序的设计目标
在软件开发过程中,测试程序是确保产品质量和功能正确性的重要环节。本章节将详细介绍测试程序的设计目标、功能需求分析,以及如何通过测试框架的选择与搭建来实现这些目标。
5.1.1 测试程序的目的和作用
测试程序的主要目的是验证软件的功能是否符合预期,确保在各种使用场景下都能稳定运行。它帮助开发者发现问题、评估风险,并提供改进软件的机会。此外,测试程序还能够提供性能基准,为未来的优化提供参考。
5.1.2 测试程序的功能需求分析
为了实现上述目标,测试程序需要满足以下功能需求:
- 自动化测试 :自动化执行测试用例,提高测试效率和覆盖率。
- 结果记录 :记录测试结果,包括成功、失败的用例和性能数据。
- 错误定位 :快速定位失败用例的错误原因,便于调试和修正。
- 报告生成 :生成详细的测试报告,包括测试覆盖率、性能指标等。
5.2 测试程序的实现细节
为了实现上述功能需求,测试程序需要进行精心的设计与实现。本节将介绍测试框架的选择与搭建、测试用例的编写与执行、以及测试结果的记录与分析。
5.2.1 测试框架的选择与搭建
在众多测试框架中,选择一个适合自己项目的框架至关重要。常见的.NET测试框架有NUnit、xUnit和MSTest等。在本章节中,我们选择NUnit作为例子来展示如何搭建测试框架。
[TestFixture]
public class ModbusTest
{
// 测试方法
[Test]
public void TestReadHoldingRegisters()
{
// 测试逻辑
}
}
- 代码逻辑 :上述代码展示了如何使用NUnit框架定义一个测试类
ModbusTest和一个测试方法TestReadHoldingRegisters。 - 参数说明 :
[TestFixture]标记是一个属性,它告诉NUnit这个类包含测试。 - 扩展性说明 :通过定义更多的测试方法,可以对不同的功能点进行测试。
5.2.2 测试用例的编写与执行
测试用例是测试程序的基础,它们需要详细、准确地描述测试步骤和预期结果。在本章节中,我们将编写一个测试用例来验证读取保持寄存器的功能。
[Test]
public void TestReadHoldingRegisters()
{
// 初始化测试环境
var client = new ModbusClient();
client.Connect("COM1", 9600, parity: Parity.None, stopBits: StopBits.One, dataBits: 8);
// 执行测试操作
var registers = client.ReadHoldingRegisters(1, 2);
// 验证结果
Assert.AreEqual(2, registers.Length);
Assert.AreEqual(0x00, registers[0]);
Assert.AreEqual(0x01, registers[1]);
// 清理测试环境
client.Disconnect();
}
- 代码逻辑 :该测试用例首先初始化一个Modbus客户端,并连接到指定的串行端口。然后,它执行读取操作,并验证返回的寄存器值是否符合预期。
- 参数说明 :
Assert.AreEqual用于验证两个值是否相等。 - 扩展性说明 :通过编写更多的测试用例,可以覆盖更多的功能点和边界条件。
5.2.3 测试结果的记录与分析
测试结果的记录和分析对于理解软件的行为和性能至关重要。NUnit提供了丰富的功能来记录和展示测试结果。
[TestFixture]
public class ModbusTest
{
[Test]
public void TestReadHoldingRegisters()
{
// 测试逻辑
}
[OneTimeSetUp]
public void Setup()
{
// 在所有测试之前执行一次
}
[OneTimeTearDown]
public void Teardown()
{
// 在所有测试之后执行一次
}
}
- 代码逻辑 :
[OneTimeSetUp]和[OneTimeTearDown]属性分别定义了在所有测试之前和之后执行的逻辑。 - 参数说明 :这些属性可以帮助记录测试的开始和结束时间,以及进行任何必要的环境设置或清理工作。
- 扩展性说明 :通过记录详细的日志和性能数据,可以帮助分析测试结果并识别性能瓶颈。
5.3 测试程序的优化与完善
随着项目的进展,测试程序可能需要进行优化和完善。本节将介绍测试过程中的性能瓶颈、测试程序的优化策略,以及测试程序的完善方向。
5.3.1 测试过程中的性能瓶颈
在执行大量的测试用例时,测试程序可能会遇到性能瓶颈。例如,网络延迟、磁盘I/O、或者内存使用过高都可能影响测试效率。
5.3.2 测试程序的优化策略
为了提高测试程序的性能,可以采取以下策略:
- 并行测试 :利用多线程或分布式测试来并行执行测试用例。
- 缓存结果 :缓存重复使用的数据,减少不必要的计算和I/O操作。
- 资源管理 :优化资源的分配和回收,避免内存泄漏和资源竞争。
5.3.3 测试程序的完善方向
测试程序的完善方向包括但不限于:
- 持续集成 :集成到CI/CD流程中,确保每次提交都能自动执行测试。
- 代码覆盖率 :增加代码覆盖率的监控,确保测试用例覆盖所有的代码路径。
- 反馈机制 :建立用户反馈机制,收集测试中的问题并及时解决。
在本章节中,我们通过详细介绍测试程序的设计目标、实现细节以及优化策略,展示了如何构建一个有效、高效的测试程序。通过实际的代码示例和分析,我们深入了解了如何使用NUnit测试框架来执行自动化测试、记录测试结果,并通过优化策略提高测试性能。这些内容不仅对IT行业的从业者具有指导意义,也为相关领域的专业人士提供了宝贵的参考。
6. 核心组件功能
6.1 核心组件的设计思路
核心组件在软件开发中扮演着至关重要的角色。它们通常负责数据处理、通信协议适配、异常处理等功能,是整个应用稳定运行的基础。在本章节中,我们将深入探讨核心组件的设计思路。
6.1.1 核心组件的作用与职责
核心组件的作用主要是对业务逻辑的抽象和封装,它将业务中的通用部分独立出来,形成可复用的组件。在MODBUS RTU协议的应用中,核心组件通常包括以下职责:
- 数据处理与转换 :负责对从设备读取的数据进行解析,并将命令数据转换成适合发送的格式。
- 通信协议的适配与封装 :封装MODBUS RTU协议的细节,提供统一的接口供上层调用。
- 异常处理与日志记录 :捕获通信过程中的异常,并记录相关日志信息,以便于问题追踪和调试。
6.1.2 核心组件的设计原则
核心组件的设计应遵循以下原则:
- 高内聚低耦合 :组件内部实现细节对外部透明,减少组件间的依赖关系。
- 可扩展性 :在设计时考虑未来可能的功能扩展,使得核心组件能够适应新的需求。
- 重用性 :组件设计应保证其在不同项目中的可重用性,避免重复造轮子。
6.2 核心组件的功能实现
核心组件的具体实现将直接影响整个系统的性能和稳定性。以下将详细介绍核心组件的几个关键功能。
6.2.1 数据处理与转换
在MODBUS RTU协议中,数据处理与转换是一个关键步骤。例如,当需要读取保持寄存器时,需要将功能码、起始地址和数量等信息转换成符合协议的数据格式。
public byte[] BuildReadHoldingRegistersCommand(byte slaveId, ushort startAddress, ushort numRegisters)
{
byte[] command = new byte[8];
command[0] = slaveId; // Slave Address
command[1] = 0x03; // Function Code
command[2] = (byte)(startAddress >> 8); // Starting Address High
command[3] = (byte)(startAddress & 0xFF); // Starting Address Low
command[4] = (byte)(numRegisters >> 8); // Quantity of Registers High
command[5] = (byte)(numRegisters & 0xFF); // Quantity of Registers Low
command[6] = CalculateCRC(command, 4); // CRC
return command;
}
6.2.2 通信协议的适配与封装
核心组件需要适配MODBUS RTU协议,提供统一的接口供其他部分调用。以下是一个简单的接口定义示例:
public interface IModbusClient
{
byte SlaveId { get; set; }
void Connect();
byte[] ReadHoldingRegisters(ushort startAddress, ushort numRegisters);
void WriteHoldingRegisters(ushort startAddress, ushort[] registers);
}
6.2.3 异常处理与日志记录
在通信过程中,可能会遇到各种异常情况,如超时、CRC校验错误等。核心组件应当捕获这些异常,并记录相应的日志信息。
try
{
// 通信逻辑
}
catch (ModbusException ex)
{
_logger.Error(ex, "Error occurred during MODBUS communication.");
}
catch (Exception ex)
{
_logger.Error(ex, "Unexpected error occurred.");
}
6.3 核心组件的集成与测试
核心组件的集成和测试是确保其稳定运行的关键步骤。以下将介绍核心组件的集成方案和功能测试。
6.3.1 核心组件的集成方案
核心组件可以通过依赖注入的方式集成到主应用程序中。例如,使用构造函数注入的方式:
public class ModbusService
{
private readonly IModbusClient _modbusClient;
public ModbusService(IModbusClient modbusClient)
{
_modbusClient = modbusClient;
}
public void ReadHoldingRegisters()
{
// 调用核心组件读取寄存器
}
}
6.3.2 集成后的功能测试
集成后,需要对核心组件进行功能测试,确保其按预期工作。可以编写测试用例来验证读写操作:
[Test]
public void TestReadHoldingRegisters()
{
// Arrange
var mockClient = Substitute.For<IModbusClient>();
mockClient.ReadHoldingRegisters(Arg.Any<ushort>(), Arg.Any<ushort>()).Returns(new byte[]{ /* Mocked response */ });
var modbusService = new ModbusService(mockClient);
// Act
modbusService.ReadHoldingRegisters();
// Assert
// Check if the response is as expected
}
6.3.3 集成测试中的问题与解决
在集成测试过程中可能会遇到一些问题,例如依赖注入容器配置错误、模拟对象设置不正确等。解决这些问题需要详细检查测试环境的搭建和配置。
通过以上步骤,我们可以确保核心组件的功能得到充分的实现和验证。在下一章节中,我们将深入探讨类库文件的结构解析与使用,为开发者提供更详细的使用指南和维护策略。
简介:MODBUS RTU协议作为工业自动化的重要组成部分,基于C#开发的MODBUS RTU类库能够帮助开发者与硬件设备进行交互。该类库提供了读写保持寄存器和线圈的功能,测试程序则便于验证类库功能和协议解析。核心组件包括MODBUS指令构建器、CRC校验、串口通信接口、事件驱动模型、异常处理及易用性API。通过解压文件,开发者能够进一步了解和使用该类库。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 32
32 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)