深度优先搜索遍历与广度优先搜索遍历
从某个顶点V出发,访问该顶点的所有邻接点V1,V2..VN,从邻接点V1,V2...VN出发,再访问他们各自的所有邻接点,重复上述步骤,直到所有的顶点都被访问过。•用邻接表来表示图,虽然有2e个表结点,但只需扫描e个结点即可完成遍历,加上访问n个头结点的实践,时间复杂度为O(n+e)•如果使用邻接矩阵,则BFS对于每一个被访问到的顶点,都要循环检测矩阵中的整整一行,(4)到5后,没有可访问的点,返
目录
一.深度优先搜索遍历
1.深度优先遍历的方法
从图中一个未访问的顶点V开始,沿着一条路一直走到底,如果到达这条路尽头的节点 ,则回退到上一个节点,再从另一条路开始走到底…,不断递归重复此过程,直到所有的顶点都遍历完成。
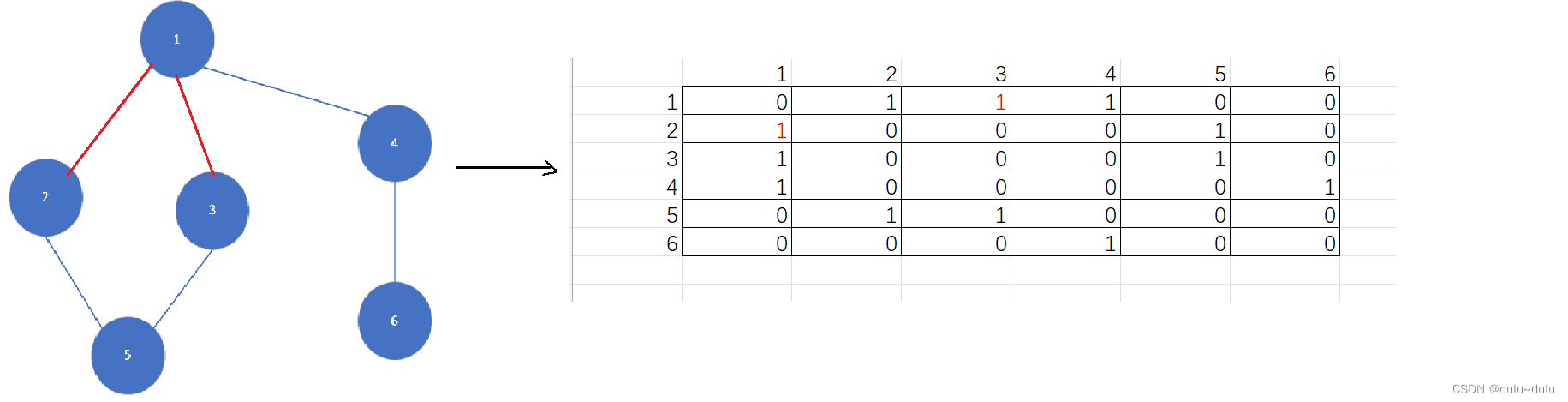
以下面无向图为例,2为起点

(1)以2为起点访问1

(2)以1为起点,因为“1”和“2”之间的边已经走过,所以走3

(3) 同理,以3为起点访问5

(4)到5后,没有可访问的点,返回3,3也没有可访问的点,到1后,可访问之前没有访问过的4

(5)4访问6,至此,遍历完所有的点,DFS(深度优先搜索遍历):2->1->3->5->4->6

2.采用邻接矩阵表示图的深度优先搜索遍历
#define MAX_VERTEX_NUM 100
typedef struct {
// 定义图的相关信息
int vexnum; // 顶点数
int arcs[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; // 邻接矩阵
// 其他成员...
} AMSGraph;
bool visited[MAX_VERTEX_NUM]; // 记录顶点是否被访问过
void DFS(AMSGraph G, int v)
{
cout << v;
visited[v] = true;
for (int w = 0; w < G.vexnum; w++) {
if (G.arcs[v][w] == 1 && !visited[w]) {
DFS(G, w);
}
}
}之前的一篇文章已经详细说明了邻接矩阵和邻接表的区别,这里同理
1.用邻接矩阵表示图,遍历图中每一个顶点都要从头扫描该顶点所在行,时间复杂度O(
)
2.用邻接表表示图,虽然有2e个表结点,但只需扫描e个结点即可完成遍历,加上访问n个头结点的时间,时间复杂度为O(n+e)
•稠密图适于在邻接矩阵上进行深度遍历;
•稀疏图适于在邻接表上进行深度遍历。
3.非连通图的遍历
左边的连通分量进行深度优先搜索遍历,再在b,g之中选择一个点进行深度优先搜索遍历
其中一种合理的顶点访问次序为:
a,c,h,d,f,k,e,b,g

二.广度优先搜索遍历
1.广度优先搜索遍历的方法
从某个顶点V出发,访问该顶点的所有邻接点V1,V2..VN,从邻接点V1,V2...VN出发,再访问他们各自的所有邻接点,重复上述步骤,直到所有的顶点都被访问过
以如下图为例,起点为V1

一层一层进行访问,广度优先搜索遍历的结果为:V1->C2->V3->V4->V5->V6->V7->V8

2.非连通图的广度遍历
与连通图类似,在b,g中任意选择一个点开始
合理的顶点访问次序为:a->c->d->e->f->h->k->b->g
3.广度优先搜索遍历的实现
广度优先搜索遍历的实现,与树的层次遍历很像,可以用队列进行实现(出队一个结点,将他的邻接结点入队)
以下动图来自爱编程的西瓜,方便大家理解遍历过程

4.按广度优先非递归遍历连通图
#include <iostream>
using namespace std;
const int MAX_SIZE = 100; // 队列的最大容量
const int MAX_VERTICES = 100; // 图的最大顶点数
struct Queue {
int data[MAX_SIZE];
int front; // 队头指针
int rear; // 队尾指针
};
struct Graph { // 定义图
bool edges[MAX_VERTICES][MAX_VERTICES]; // 邻接矩阵
int numVertices; // 实际顶点数
};
void InitQueue(Queue& Q) {
Q.front = 0;
Q.rear = -1;
}
bool EnQueue(Queue& Q, int x) {
if (Q.rear == MAX_SIZE - 1) {
// 队列已满,无法插入
return false;
}
Q.data[++Q.rear] = x;
return true;
}
bool DeQueue(Queue& Q, int& x) {
if (Q.front > Q.rear) {
// 队列为空,无法出队
return false;
}
x = Q.data[Q.front++];
return true;
}
bool QueueEmpty(Queue& Q) {
return Q.front > Q.rear;
}
// 找到顶点u的第一个邻接点并返回
int FirstAdjVex(Graph& G, int u) {
for (int v = 0; v < G.numVertices; ++v) {
if (G.edges[u][v]) {
return v;
}
}
return -1; // 或者返回一个特殊的值表示找不到邻接点
}
// 找到图 G 中顶点 u 相对于顶点 w 的下一个邻接点并返回
int NextAdjVex(Graph& G, int u, int w) {
for (int v = w + 1; v < G.numVertices; ++v) {
if (G.edges[u][v]) {
return v;
}
}
return -1; // 或者返回一个特殊的值表示找不到下一个邻接点
}
void BFS(Graph G, int v) {
cout << v;
bool visited[MAX_VERTICES] = { false };
visited[v] = true; // 访问第v个顶点
Queue Q;
InitQueue(Q);
EnQueue(Q, v); // v进队
while (!QueueEmpty(Q)) {
int u;
DeQueue(Q, u); // 队头元素出队并置为u
for (int w = FirstAdjVex(G, u); w >= 0; w = NextAdjVex(G, u, w)) {
if (!visited[w]) { // w为u的尚未访问的邻接点
cout << w;
visited[w] = true;
EnQueue(Q, w); // w进队(将访问的每一个邻接点入队)
}
}
}
}
广度优先搜索遍历算法的效率
1.如果使用邻接矩阵,则BFS对于每一个被访问到的顶点,都要循环检测矩阵中的整整一行,时间复杂度为O()
2.用邻接表来表示图,虽然有2e个表结点,但只需扫描e个结点即可完成遍历,加上访问n个头结点的实践,时间复杂度为O(n+e)
深度优先搜索遍历(DFS)与广度优先搜索遍历(BFS)算法的效率
1.空间复杂度相同,都是O(n)(借用了堆栈或队列)
2.时间复杂度只与存储结构(邻接矩阵【O()】或邻接表【O(n+e)】)有关,而与搜索路径无关

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 5
5 0
0- 0



 已为社区贡献114条内容
已为社区贡献114条内容

所有评论(0)