
凸优化、共轭、对偶、对偶梯度下降、原始对偶
本文部分内容来自。
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家:点击跳转
目录
后来发现网友的内容似乎来自北大教材链接
一,仿射集、仿射包
1,仿射集(affine set)
满足如下条件的集合叫仿射集:

直线是仿射集,线段不是
2,仿射组合(affine combination)

3,仿射包(affine hull)

对任意集合 A,增加最少的元素使 A 变为仿射集 B ,则仿射集 B 是 A 的仿射包,即 B 是包含 A的最小仿射集。
线段的仿射包是包含这条线段的直线,平面多边形(三角形,正方形等)的仿射包是包含此多边形的整个平面。
仿射集的仿射包是它自身。
二,凸集、凸包
1,凸集

仿射集都是凸集,凸集不一定是仿射集,如线段、凸多边形。
2,凸组合

3,凸包(convex hull)

对任意集合 A,增加最少的元素使A 变为凸集B ,则凸集B 是 A 的凸包,即 B 是包含 A 的最小凸集。
凸集的凸包是其本身。
三,凸锥、锥包
1,凸锥(convex cone)
![]()
锥其实就是若干(有限或无限)条从原点出发的射线组成的。

设函数f是射线到角度的映射,角度范围是[0,2π),那么:
一个锥是凸锥 等价于 这个锥作为定义域时f的值域是凸集(即凸的线段)
除了单射线和平面点全集之外,其他凸锥的边界就是2条射线,所构成的夹角一定在(0,π]区间内。
2,锥组合

3,锥包(cone hull)

对任意集合 A,增加最少的元素使 A 变为凸锥 B ,则凸锥 B 是 A 的锥包,即 B 是包含 A 的最小凸锥。
四,极点、回收方向、回收锥、极向量、极方向
1,极点
凸集中不能表示成两个不同点的凸组合的点,叫做极点。
2,回收方向、回收锥

非空凸集的所有回收方向构成的凸锥(包括零向量),称为
的回收锥
如凸集{y>=x^2}的回收锥是{x=0, y>=0}, 凸集{y>=e^x}的回收锥是{x<=0,y>=0}
如有限凸集的回收锥一定是{x=0,y=0},即只有零向量这一个回收方向。
3,极向量、极方向
凸锥中不能表示成其他向量的锥组合的向量,称为极向量。
凸集的回收锥的极向量,称为该凸集的极方向。
如凸锥{x<=0,y>=0}的极向量的集合是{x=0,y>=0}∪{x<=0,y=0},凸集{y>=e^x}的极方向的集合也是它。
五,凸函数
1,凸函数

一般有3种说法:
(1)f1是凸函数,f2是凹函数
(2)f1是凹函数,f2是凸函数
(3)f1是下凸函数,f2是上凸函数,都是凸函数
都是一样的意思,仅仅叫法不同而已,不用太在意。
用(1)说法来定义凸函数:


我个人喜欢用(3)说法,因为他不参与(1)和(2)的争斗。
上凸函数中,点集{y<f2(x)}是凸集,下凸函数中,点集{y>f1(x)}是凸集。
2,一阶条件

3,二阶条件

如果是多元函数,它的二阶导数是Hessian矩阵。
4,示性函数

凸集的示性函数为凸函数。
六,共轭函数
1,共轭函数


sup是上确界,dom是定义域。
2,示例

3,共轭函数的性质
(1)函数的共轭函数是凸函数
(2)凸函数f的共轭函数的共轭函数是f本身
以一元可微凸函数为例,推导如下:

所以共轭函数的共轭函数的它本身。
其中,式(1)也叫勒让德变换。
我们说凸函数f的共轭函数的共轭函数是f本身,其实也就是说勒让德变换是自身的逆变换。
(3)共轭函数的导数和原函数的导数互为反函数
即上面的 式(2)。
(4)线性变换
推导:
七,对偶梯度下降
1,对偶问题
原始问题


对偶函数

对偶问题

2,KKT条件

对一般的原问题,KKT 条件是取到最优解的必要条件。
对原问题为凸问题, KKT 条件是取到最优解的充要条件。
3,弱对偶、强对偶
弱对偶:原问题最小值大于等于对偶问题最大值。弱对偶恒成立。
强对偶:原问题和对偶问题的最优值相等。强对偶并不恒成立。
4,SCQ条件

5,对偶问题的例子
在原问题比较简单的情况下,可以把对偶问题的具体表达式推导出来。
(1)单个函数+线性约束

D的推导:
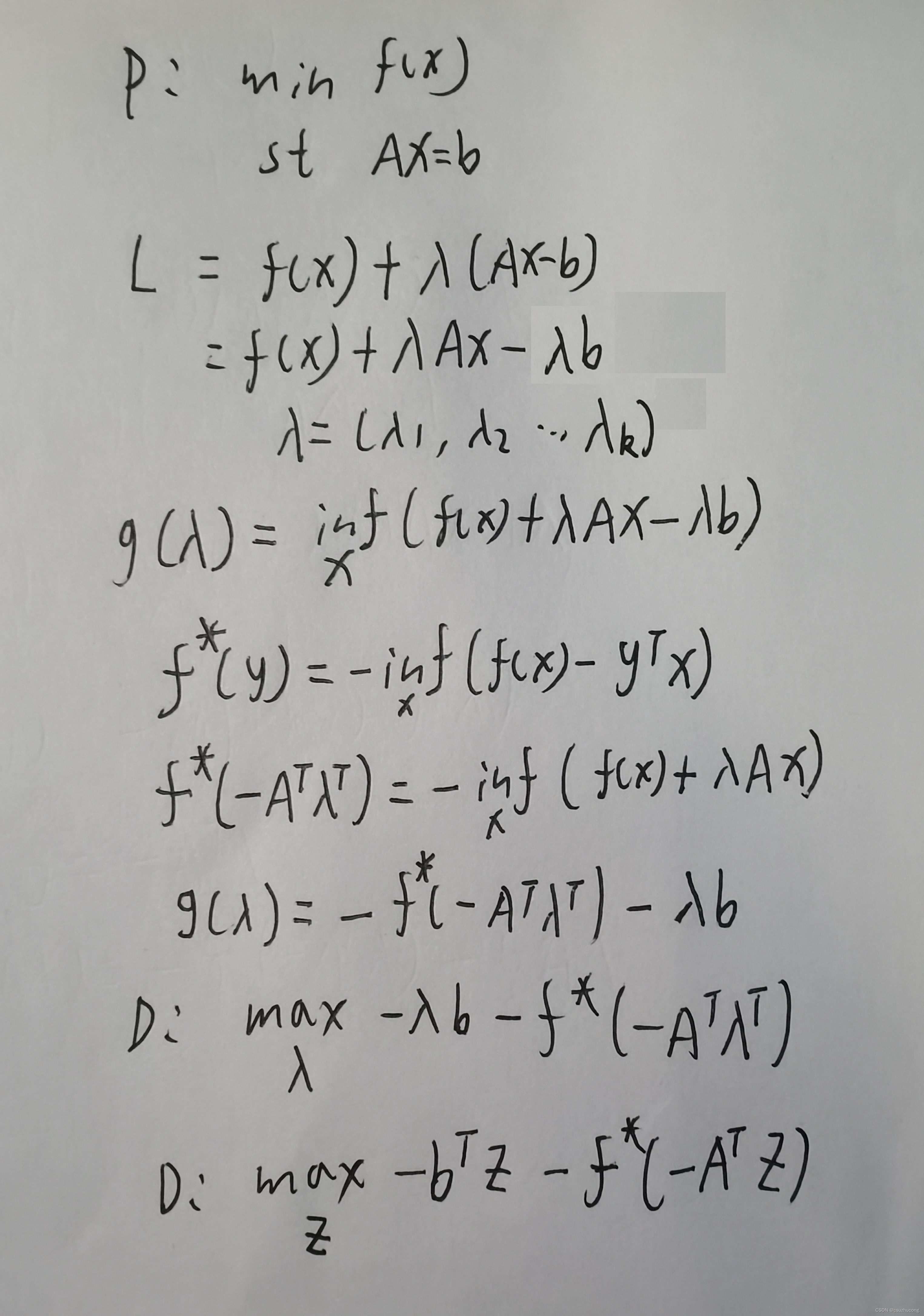
(2)函数+函数+线性约束
P:

D:

(3)函数+复合函数
D的推导:

(4)函数+复合线性函数 h(x) = Ax

6,对偶梯度下降、对偶分解
把原问题,转化成对偶问题,并用梯度或次梯度做梯度下降的迭代算法。
(1)单个函数+线性约束

这个例子中,原问题求f(x)的最小值,和次梯度中求x其实差不多,看不出对偶的效果。
(2)函数+函数+线性约束
P:
D:
次梯度下降:

相比求f1+f2的最小值,对偶问题的次梯度是把f1和f2完全分开计算的,这就是对偶分解的优势所在。
7,对偶近端梯度下降
对偶近端梯度下降就是把有问题P转化成对偶问题D,再用近端梯度下降。
示例:

其中f和g 是凸函数。
如果对P用近端梯度下降,则需要求G(x)=g(Ax)这个复合函数的近端映射函数。
而如果转化成D,那么就只需要求g*的近端映射函数即可。
根据近端梯度下降公式变换得到:对偶近端梯度下降公式:

根据前面的“共轭函数的次梯度计算”,这个公式可以表示成2步:

即,原问题P化为2个小问题,一是只含f的最优值计算,二是g*的近端映射函数。
再根据广义Moreau 分解可以把g*的近端映射函数化成g的近端映射函数,从而把迭代公式表示成3步:


八,一阶原始对偶
本章示例:
P:min f(x) + g(Ax),其中f和g 是凸函数。
1,部分拉格朗日函数
拉格朗日函数:
部分拉格朗日函数:
2,一阶原始对偶
由于h既含有f的原函数,又含有g的共轭函数,所以我们把关于h的优化问题称为一阶原始对偶。
3,对偶混合梯度下降 (PDHG)
KKT条件:
本例中,KKT条件化简成:
∂L/∂x = 0 (1)
∂L/∂y = 0 (2)
y=Ax (3)
λ>=0 (4)
其中(1)可以化成: (5)
(2)可以化成即
即
(6)
联合(3)(6)消掉y得到:
(7)
而(5)(7)联合起来,等价于寻找h的鞍点,即调整x使得h最小,调整λ使得h最大。
在近端梯度下降 和 对偶近端梯度下降中,优化目标的2个部分都是同一个自变量,所以不能很好的解耦。
而在一阶原始对偶h(x,z)中,x和z是完全解耦的,所以迭代过程很直观,就是交替对x和z做近端映射即可,我们称之为对偶混合梯度下降。
4,部分拉格朗日函数的近端映射
以x为例,把h看做关于x的函数,h是在f的基础上,加了常量-g^*(z),再加了线性函数z^TAx
那么根据近端映射的运算法则:
同理,
这样就得到了PDHG的迭代公式:
这2步交替进行,不断刷新x和z的值即可。
5,Chambolle-Pock、C++实现
Chambolle-Pock和PDHG非常像,加了一个外推操作,感觉就是做了简单的加速,提高了步长。
PS:近端映射函数中的t涉及到最终是否收敛,所以取值受限于一个范围,并不是只要调整t就能加速。
Chambolle-Pock的迭代公式:
一般取=1
下面是我实现的ChambollePock算法,没有支持每次迭代都使用不同的t和a。
vector<float> add(const vector<float>&x1, const vector<float>&x2)
{
vector<float>ans(x1.size(), 0);
for (int i = 0; i < x1.size(); i++)ans[i] = x1[i] + x2[i];
return ans;
}
vector<float> multi(float t, const vector<float>&x)
{
vector<float>ans(x.size(), 0);
for (int i = 0; i < x.size(); i++)ans[i] = x[i];
return ans;
}
vector<float> multi(const vector<vector<float>>&A, const vector<float>&x)
{
vector<float>ans(x.size(), 0);
for (int i = 0; i < x.size(); i++) {
for (int j = 0; j < x.size(); j++)ans[i] += A[i][j] * x[j];
}
return ans;
}
vector<vector<float>> T(const vector<vector<float>>&A)
{
vector<vector<float>>ans = A;
for (int i = 0; i < A.size(); i++) {
for (int j = 0; j < A.size(); j++) {
ans[i][j] = A[j][i];
}
}
return ans;
}
vector<float> prox_f(float t, vector<float>x)
{
return x; //自定义
}
vector<float> prox_g_conjugate(float t, vector<float>z)
{
return z;//自定义
}
// solve min h(x) max h(z) , which h(x,z)=f(x)-g_conjugate(z)+z^T * A * x
void ChambollePock(vector<float> &x,vector<float>&z, const vector<vector<float>>&A,int t, int a, int learningTimes, int theta = 1) //x and z is both input and output
{
vector<float>y = x;
auto AT = T(A);
for (int i = 0; i < learningTimes; i++) {
z = prox_g_conjugate(t, add(z, multi(t, multi(A, y))));
y = multi(-theta, x);
x = prox_f(a, add(x, multi(-a, multi(AT, z))));
y = add(multi(theta + 1, x), y);
}
}只需要根据实际情况提供2个prox函数即可调用。
6,随机PDHG算法(SPDHG)
在Chambolle-Pock的基础上,把当成一个对角矩阵,其中对角线上每个分量随机取0或者1
即x不一定各个方向都往外推,可能只是一部分方向往外推。
7,python odl源码
在stochastic_primal_dual_hybrid_gradient.py中有spdhg的接口:
def spdhg_generic(x, f, g, A, tau, sigma, niter, **kwargs):
r"""Computes a saddle point with a stochastic PDHG.
This means, a solution (x*, y*), y* = (y*_1, ..., y*_n) such that
(x*, y*) in arg min_x max_y sum_i=1^n <y_i, A_i> - f*[i](y_i) + g(x)
where g : X -> IR_infty and f[i] : Y[i] -> IR_infty are convex, l.s.c. and
proper functionals. For this algorithm, they all may be non-smooth and no
strong convexity is assumed.
Parameters
----------
x : primal variable
This variable is both input and output of the method.
f : functions
Functionals Y[i] -> IR_infty that all have a convex conjugate with a
proximal operator, i.e.
f[i].convex_conj.proximal(sigma[i]) : Y[i] -> Y[i].
g : function
Functional X -> IR_infty that has a proximal operator, i.e.
g.proximal(tau) : X -> X.
A : functions
Operators A[i] : X -> Y[i] that possess adjoints: A[i].adjoint
tau : scalar / vector / matrix
Step size for primal variable. Note that the proximal operator of g
has to be well-defined for this input.
sigma : scalar
Scalar / vector / matrix used as step size for dual variable. Note that
the proximal operator related to f (see above) has to be well-defined
for this input.
niter : int
Number of iterations
Other Parameters
----------------
y : dual variable, optional
Dual variable is part of a product space. By default equals 0.
z : variable, optional
Adjoint of dual variable, z = A^* y. By default equals 0 if y = 0.
mu_g : scalar
Strong convexity constant of g.
theta : scalar
Global extrapolation factor.
extra: list
List of local extrapolation paramters for every index i. By default
extra_i = 1.
fun_select : function
Function that selects blocks at every iteration IN -> {1,...,n}. By
default this is serial uniform sampling, fun_select(k) selects an index
i \in {1,...,n} with probability 1/n.
callback : callable, optional
Function called with the current iterate after each iteration.
References
----------
[CERS2017] A. Chambolle, M. J. Ehrhardt, P. Richtarik and C.-B. Schoenlieb,
*Stochastic Primal-Dual Hybrid Gradient Algorithm with Arbitrary Sampling
and Imaging Applications*. ArXiv: http://arxiv.org/abs/1706.04957 (2017).
[E+2017] M. J. Ehrhardt, P. J. Markiewicz, P. Richtarik, J. Schott,
A. Chambolle and C.-B. Schoenlieb, *Faster PET reconstruction with a
stochastic primal-dual hybrid gradient method*. Wavelets and Sparsity XVII,
58 (2017) http://doi.org/10.1117/12.2272946.
"""
# Callback object
callback = kwargs.pop('callback', None)
if callback is not None and not callable(callback):
raise TypeError('`callback` {} is not callable'
''.format(callback))
# Dual variable
y = kwargs.pop('y', None)
if y is None:
y = A.range.zero()
# Adjoint of dual variable
z = kwargs.pop('z', None)
if z is None:
if y.norm() == 0:
z = A.domain.zero()
else:
z = A.adjoint(y)
# Strong convexity of g
mu_g = kwargs.pop('mu_g', None)
if mu_g is None:
update_proximal_primal = False
else:
update_proximal_primal = True
# Global extrapolation factor theta
theta = kwargs.pop('theta', 1)
# Second extrapolation factor
extra = kwargs.pop('extra', None)
if extra is None:
extra = [1] * len(sigma)
# Selection function
fun_select = kwargs.pop('fun_select', None)
if fun_select is None:
def fun_select(x):
return [int(np.random.choice(len(A), 1, p=1 / len(A)))]
# Initialize variables
z_relax = z.copy()
dz = A.domain.element()
y_old = A.range.element()
# Save proximal operators
proximal_dual_sigma = [fi.convex_conj.proximal(si)
for fi, si in zip(f, sigma)]
proximal_primal_tau = g.proximal(tau)
# run the iterations
for k in range(niter):
# select block
selected = fun_select(k)
# update primal variable
# tmp = x - tau * z_relax; z_relax used as tmp variable
z_relax.lincomb(1, x, -tau, z_relax)
# x = prox(tmp)
proximal_primal_tau(z_relax, out=x)
# update extrapolation parameter theta
if update_proximal_primal:
theta = float(1 / np.sqrt(1 + 2 * mu_g * tau))
# update dual variable and z, z_relax
z_relax.assign(z)
for i in selected:
# save old yi
y_old[i].assign(y[i])
# tmp = Ai(x)
A[i](x, out=y[i])
# tmp = y_old + sigma_i * Ai(x)
y[i].lincomb(1, y_old[i], sigma[i], y[i])
# y[i]= prox(tmp)
proximal_dual_sigma[i](y[i], out=y[i])
# update adjoint of dual variable
y_old[i].lincomb(-1, y_old[i], 1, y[i])
A[i].adjoint(y_old[i], out=dz)
z += dz
# compute extrapolation
z_relax.lincomb(1, z_relax, 1 + theta * extra[i], dz)
# update the step sizes tau and sigma for acceleration
if update_proximal_primal:
for i in range(len(sigma)):
sigma[i] /= theta
tau *= theta
proximal_dual_sigma = [fi.convex_conj.proximal(si)
for fi, si in zip(f, sigma)]
proximal_primal_tau = g.proximal(tau)
if callback is not None:
callback([x, y])
开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 6
6 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)