永磁同步电机高性能控制算法(9)—— 简单解析基于LESO的线性ADRC转速环为什么没有超调量
在往期内容中,已经公布了基于线性扩张状态观测器(LESO)的线性自抗扰(LADRC)转速环与传统PI转速环的对比。与转速环采用PI相比,基于LESO的线性ADRC转速环能够更快的达到给定转速,而且无超调量。
1.基于LESO的线性ADRC转速环与基于PI调节器的转速环的对比
在往期内容中,已经公布了基于线性扩张状态观测器(LESO)的线性自抗扰(LADRC)转速环与传统PI转速环的对比。
与转速环采用PI相比,基于LESO的线性ADRC转速环能够更快的达到给定转速,而且无超调量。






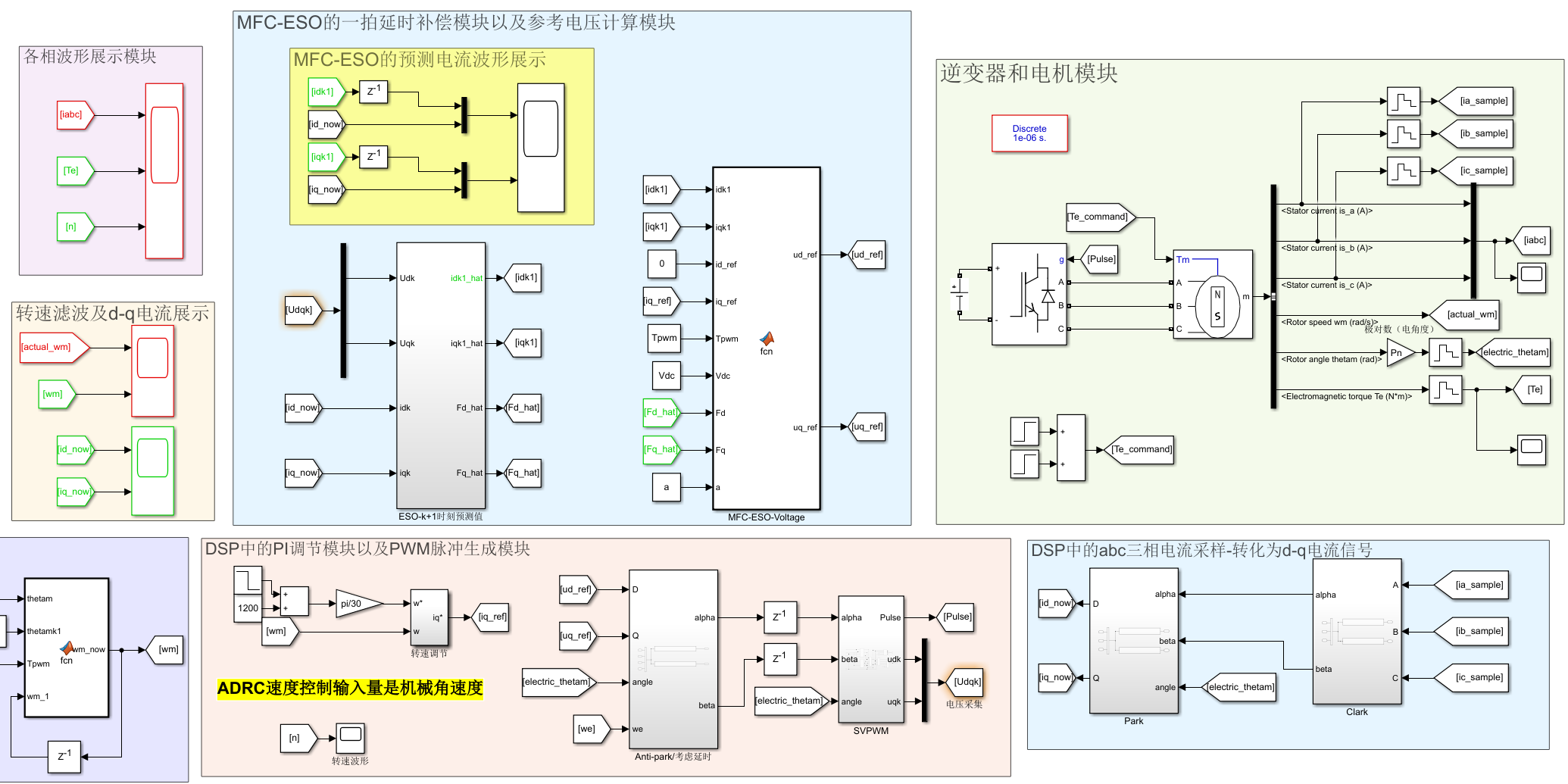
2.基于LESO的线性ADRC转速环的仿真搭建
参考文献(南航黄老师,在高性能控制方面的论文我感觉是写的很好的。论文质量要远远远远远高于那种通过靠更换观测器水出来的论文):

这篇论文讲的是高阶LESO,不过论文中把各阶LESO的表达式都列写出来了,而且也把框图画出来了,所以我当时就是照着这篇来搭建的。
先看看电机转速方程:

然后开始构造转速方程的超局部模型,就看完下面画的方框就行了。

我为什么把这个式子叫做转速方程的超局部模型?
在之前的电流环无模型算法中,用到电流环的超局部模型表达式如下:

对比一下看看,这两个式子的等式左边都是变化率(转速的变化率以及电流的变化率),等式的右边都是一个扰动量F、一个输入量(转速环的输入量是q轴电流,电流环的输入量是电压u)以及一个输入量的增益(转速环的输入量增益为b0=Ktn/Jn=1.5*Pn*flux/Jn,电流环的输入量增益为a=1/L)。这两个式子中,只有输入量的增益与系统参数有关。转速环的输入量增益与电机极对数Pn、磁链flux、转动惯量Jn有关,电流环的输入量增益与电感有关。
那当这些参数变化的时候,基于ESO的ADRC能否还能具有鲁棒性呢?当然是能的,因为当这些参数变化的时候,相当于把参数变化带来的误差看做一个新的扰动,又被归类到扰动量F去了。但是这些参数不能变化太大,变化个一两倍的话,系统的性能还是没问题的。
LESO的公式

文章这是给了多阶的ESO公式,按照他给的这个模板,直接把n=1带入,就可以得到最低阶数的LESO公式了。文章里面的公式看不懂的话可以看看这一篇知乎:
或者直接按照之前电流环的公式来搭建(两个公式就是符号换了而已,其他没有任何区别):

注意,把公式列写好之后,一定要离散化,一般就是用前向欧拉离散化,也还是在我电流环ESO的这篇论文里讲到了。
到这一步,我们相当于把观测器设计好了,但是还没有实行控制。
构建控制律
文章中构建的控制如下:

不要在论文中看的控制率就瞎用,我们要想为什么?我们把式子(11)带入式子(2)中可以得到如下的表达式。因为Z2就是Fw的估计量,ESO设计比较准确的话,那就会有Z2=Fw,进而将下式进一步化简。

从上式可以看的,在不考虑转速环输出饱和的话,参考转速与实际转速的差值越大或者Kp的值越大,那么电机加速度就越大,达到参考转速的时间就越短。
现在观测器有了,控制率也有了,就可以实现闭环控制了。控制框图如下,图里画的式高阶LESO,自己改成低阶的就行了。

这里值得注意的是,注意ESO中的估计值Z1、Z2、Z3、Z4,这些估计值都是通过串联积分的形式积分得到的。ESO就相当于一个积分器。
而控制率中还有一个比例环节Kp。因此,实际上的LADRC也就是等同于一个比例环节Kp+ESO(积分环节)。
对LADRC比较有兴趣的可以看看下面几篇知乎:
 https://zhuanlan.zhihu.com/p/677913331
https://zhuanlan.zhihu.com/p/677913331
3.LADRC为什么没有转速超调量?
根据上述观测器以及控制率搭建的仿真如下:(这里还有一点要注意的是,ADRC的公式中,转速环的输入都是机械角速度,而不是转速n了,所以转速环的时候,还要把原来的比例系数Kp给换算一下。)

仿真对比如下(更详细的仿真已经放在文章开头了。下文的积分器输出对比都是基于这两幅图的工况):


刚才前面也说了,LADRC就是等同于一个比例环节Kp+ESO(积分环节)。那为什么PI也是比例环节+积分环节,为什么PI的超调量那么大?(我就以我做电机控制的角度来看,本人控制理论水平较差。)
这是因为,ESO这个积分环节的输入量是转速估计值与实际值的差值,传统PI调节器的积分环节输入量是转速参考值与实际值的差值。
在没有达到转速参考值之前,传统PI调节器的积分环节输出会不断增大,直到限幅值为止,之后又从限幅值降下来。而对于ESO而言,即使没有达到转速参考值,但是转速估计值与实际值可能都已经完全相等了,所以ESO的积分输出不会再继续增大了,因此就不需要像传统的积分环节进行退饱和。
那我们来对比看看两者的积分项的输出变化:

可以看到,在启动过程中,ESO的积分输出很小,因此也不需要花时间进行退饱和。

可以看到,在启动过程中,PI调节器中的积分输出很大(达到了限幅值25A),因此需要花大量时间进行退饱和。
为什么ESO积分输出和PI调节器中的积分输出在0.2s之后都为10Nm?因为我在0.2s时突加了10Nm。由于两种控制策略都可以实现无差跟踪,所以转速环的Kp输出都为零,所以为了抵抗10Nm的负载,转速环积分输出都为10A。因为我的仿真模型中,1A电流对应1Nm负载,所以10Nm负载就是10A电流。
4.LADRC的鲁棒性
前面已经说到转速环的输入量增益为b0=Ktn/Jn=1.5*Pn*flux/Jn
即转速环的输入量增益与电机极对数Pn、磁链flux、转动惯量Jn有关。
仿真参数如下:
Tpwm = 1e-4;%开关周期
Tspeed = 1e-4;%转速采样周期
Pn = 4;%电机极对数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
J = 0.01;%转动惯量
Vdc = 311;%直流母线电压
iqmax = 25;%额定电流
fc = 300;%电流环带宽
Kt = 1.5*Pn*flux;
b = Kt/J;%这个b是完全准确的
%转速环ESO参数
c = 500;
c1 = 2*c;
c2 = c*c;
现在来看看b±变化50%的对比:



可以看的,b为标准值的150%时,转速虽然有点超调,但是这个超调量和调节时间还是明显优于PI调节器的;b为标准值的50%,转速上升的速度稍微有点慢,但是性能还是挺好的,转速也没有超调。



把转速环PI换成LADRC效果还是非常明显的,其实电流环也同理,换成LADRC之后,超调会消失(本文结论)。
从上述几幅图来看(启动过程),只有在转速LADRC,电流环MFPCC-ESO的情况下,转速和q轴电流都没有超调量(q轴电流正比于转矩,q轴电流有没有超调量可以从转矩波形中看出来。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 26
26 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)