惯性导航原理(五)-IMU误差分类(上)
文章目录传感器误差类型静态误差(加性误差)动态误差(乘性误差)传感器误差的成分基本的误差成分确定性和随机性静态误差动态误差噪声(Noise )噪声白噪声模型参数传感器误差类型静态误差(加性误差)静止不动时就表现出来,输出的误差;零偏Bias(加速度计和陀螺的零位偏置),噪声Noise动态误差(乘性误差)运动起来才表现出来的误差:比例因子误差Scale factor包含非线性non-linearit
·
传感器误差类型
静态误差(加性误差)
静止不动时就表现出来,输出的误差;零偏Bias(加速度计和陀螺的零位偏置),噪声Noise
动态误差(乘性误差)
运动起来才表现出来的误差:
比例因子误差Scale factor
包含非线性non-linearity
轴偏移/轴交叉/交轴耦合(Axes misalignment / cross-axis)
上述三个类型写成误差表达式的时候,是与真实输入相乘,才能得到误差的数值,也就是它们只是一个系数

上图中,横轴为理想输入(真实输入),纵轴是传感器输出;理想情况下是过原点的直线,斜率为1的;但实际上不过原点(零偏),斜率不为1(比例因子误差),也不可能是直线(非线性误差);比如是x方向的输出,只与x方向的输入有关,但是其他轴有输入时,x轴可能还有输出(这就是交轴耦合)
传感器误差的成分
基本的误差成分
- 常值误差(
Constant error),即静止不动的时候,就有的一个误差,也就是零偏误差,其中包含不变的部分,就是常值误差。 - 重复性(
Repeatability)-- multiple runs,指的是每次上电,零偏误差的差异,就是零偏的重复性误差,或叫逐次上电重复性误差 - 稳定性(
Stability)-- within one run,本次上电稳定了,热平衡了,但是使用过程中,零偏还是有起伏,所以就是零偏的稳定性 - 噪声和带宽(
Noise&Band width),噪声即为快速变化的,高频的误差成分 - 热敏感度(
Thermal sensitivity,温漂)
确定性和随机性
一般情况,常值误差为确定性误差
稳定性、噪声、重复性为随机性误差
静态误差
以零偏为例来理解不同的误差成分
- 常值零偏
- 零偏稳定性,噪声

动态误差
比例因子:
- 输出被测量的信号/输入物理量
非线性:
- 随输入信号变化的比例因子
轴偏移/轴交叉:
- 每个轴的输出受到其它两个轴的输入的影响

噪声(Noise )
噪声
- 高频误差,完全随机(相邻历元不相关)
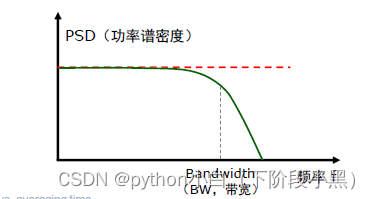
- 白噪声模型:功率谱密度在整个频域内均匀分布的噪声
- 实际白噪声的带宽
- 别名:
angular random walk(ARW,角度随机游走,陀螺角速率白噪声积分的随机游走) &velocity random walk(VRW,速度随机游走)

对于上图的功率谱密度(单位频率上的功率),白噪声随着频率或频点的变化,其功率谱密度不变,即图中红色虚线部分;总功率是将单位频点上的功率积分得到的;但现实中并没有这种理想的白噪声(实际中可能是绿色曲线),因为频率不可能是无穷频率;这时候,只需要我们传感器的感知带宽覆盖被测信号的带宽,那么对于被测信号来说,它经历的就是白噪声了,这样用白噪声对加速度计或陀螺传感器进行建模就没有任何问题了。
白噪声模型参数
功率谱密度(PSD): (信号单位)2/Hz
- 常用PSD单位开根号来表示: (信号单位)/sqrt(Hz)
谱密度单位
- 角速度:rad/s/sqrt(Hz), deg/s/sqrt(Hz), deg/sqrt(hr)
- 加速度:m/s2/sqrt(Hz), m/s/sqrt(hr), mGal/sqrt(Hz)

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 5
5 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)