一种基于YOLOv8改进的高精度表面缺陷检测网络, NEU-DET和GC10-DET涨点明显(原创自研)
创新点:1)DCNv4结合SPPF;2)C2f创新为CSPStage;3)三个检测头更新为四个检测头;
💡💡💡本文摘要:一种基于YOLOv8改进的高精度表面缺陷检测, 在NEU-DET和GC10-DET任务中涨点明显;
💡💡💡创新点:1)DCNv4结合SPPF;2)C2f创新为CSPStage;3)三个检测头更新为四个检测头;
原创组合创新,可直接使用至其他检测任务;
💡💡💡创新点:在NEU-DEU任务中mAP由原始的0.709 提升至0.737
博主简介
AI小怪兽,YOLO骨灰级玩家,1)YOLOv5、v7、v8、v9优化创新,轻松涨点和模型轻量化;2)目标检测、语义分割、OCR、分类等技术孵化,赋能智能制造,工业项目落地经验丰富;

原创自研系列, 2024年计算机视觉顶会创新点
23年最火系列,内涵80+优化改进篇,涨点小能手,助力科研,好评率极高
应用系列篇:
1.高精度的YOLOv8改进

1.1 DCNv4原理
原文链接:YOLOv8全网首发:新一代高效可形变卷积DCNv4如何做二次创新?高效结合SPPF_可形变卷积最新版-CSDN博客

论文: https://arxiv.org/pdf/2401.06197.pdf
摘要:我们介绍了可变形卷积v4 (DCNv4),这是一种高效的算子,专为广泛的视觉应用而设计。DCNv4通过两个关键增强解决了其前身DCNv3的局限性:去除空间聚合中的softmax归一化,增强空间聚合的动态性和表现力;优化内存访问以最小化冗余操作以提高速度。与DCNv3相比,这些改进显著加快了收敛速度,并大幅提高了处理速度,其中DCNv4的转发速度是DCNv3的三倍以上。DCNv4在各种任务中表现出卓越的性能,包括图像分类、实例和语义分割,尤其是图像生成。当在潜在扩散模型中与U-Net等生成模型集成时,DCNv4的性能优于其基线,强调了其增强生成模型的可能性。在实际应用中,将InternImage模型中的DCNv3替换为DCNv4来创建FlashInternImage,无需进一步修改即可使速度提高80%,并进一步提高性能。DCNv4在速度和效率方面的进步,以及它在不同视觉任务中的强大性能,显示了它作为未来视觉模型基础构建块的潜力。
图1所示。(a)我们以DCNv3为基准显示相对运行时间。DCNv4比DCNv3有明显的加速,并且超过了其他常见的视觉算子。(b)在相同的网络架构下,DCNv4收敛速度快于其他视觉算子,而DCNv3在初始训练阶段落后于视觉算子。

为了克服这些挑战,我们提出了可变形卷积v4 (DCNv4),这是一种创新的进步,用于优化稀疏DCN算子的实际效率。DCNv4具有更快的实现速度和改进的操作符设计,以增强其性能,我们将详细说明如下:
首先,我们对现有实现进行指令级内核分析,发现DCNv3已经是轻量级的。计算成本不到1%,而内存访问成本为99%。这促使我们重新审视运算符实现,并发现DCN转发过程中的许多内存访问是冗余的,因此可以进行优化,从而实现更快的DCNv4实现。
其次,从卷积的无界权值范围中得到启发,我们发现在DCNv3中,密集关注下的标准操作——空间聚合中的softmax归一化是不必要的,因为它不要求算子对每个位置都有专用的聚合窗口。直观地说,softmax将有界的0 ~ 1值范围放在权重上,并将限制聚合权重的表达能力。这一见解使我们消除了DCNv4中的softmax,增强了其动态特性并提高了其性能。
因此,DCNv4不仅收敛速度明显快于DCNv3,而且正向速度提高了3倍以上。这一改进使DCNv4能够充分利用其稀疏特性,成为最快的通用核心视觉算子之一。
我们进一步将InternImage中的DCNv3替换为DCNv4,创建FlashInternImage。值得注意的是,与InternImage相比,FlashInternImage在没有任何额外修改的情况下实现了50 ~ 80%的速度提升。这一增强定位FlashInternImage作为最快的现代视觉骨干网络之一,同时保持卓越的性能。在DCNv4的帮助下,FlashInternImage显著提高了ImageNet分类[10]和迁移学习设置的收敛速度,并进一步提高了下游任务的性能。
图2。(a)注意力(Attention)和(b) DCNv3使用有限的(范围从0 ~ 1)动态权值来聚合空间特征,而注意力的窗口(采样点集)是相同的,DCNv3为每个位置使用专用的窗口。(c)卷积对于聚合权值具有更灵活的无界值范围,并为每个位置使用专用滑动窗口,但窗口形状和聚合权值是与输入无关的。(d) DCNv4结合两者的优点,采用自适应聚合窗口和无界值范围的动态聚合权值。

1.2 CSPStage介绍

论文:https://arxiv.org/abs/2202.04256
原文链接:
本文是阿里巴巴在目标检测领域的工作(已被ICLR2022接收),提出了一种新颖的类“长颈鹿”的GiraffeDet架构,它采用了轻骨干、重Neck的架构设计范式。所提GiraffeDet在COCO数据集上取得了比常规CNN骨干更优异的性能,取得了54.1%mAP指标,具有更优异的处理目标大尺度变化问题的能力。

本文提出了GiraffeDet用于高效目标检测,giraffe包含轻量space-to-depth chain、Generalized-FPN以及预测网络

FPN旨在对CNN骨干网络提取的不同分辨率的多尺度特征进行融合。上图给出了FPN的进化,从最初的FPN到PANet再到BiFPN。我们注意到:这些FPN架构仅聚焦于特征融合,缺少了块内连接。因此,我们设计了一种新的路径融合GFPN:包含跳层与跨尺度连接,见上图d。
2.实验结果分析
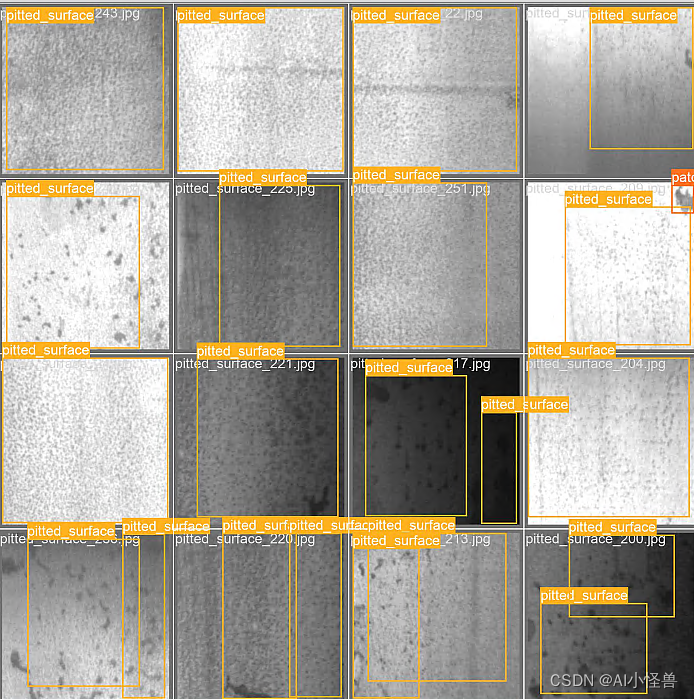
我们的方法在NEU-DET和GC10-DET上取得了更好的性能。
在NEU-DEU任务中mAP由原始的0.709 提升至0.737

原始yolov8n

高精度的YOLOv8改进

3.源码获取
关注下方名片点击关注,即可源码获取途径。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 33
33 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)