模型预测控制:线性MPC
模型预测控制(Model Predictive Control, MPC)是一种广泛应用于工业过程控制和自动驾驶等领域的先进控制技术。MPC通过在线解决优化问题来计算控制输入,从而实现系统的最优控制。本文将介绍线性MPC的系统模型、优化问题、LMPC算法,以及单输入系统和多输入系统的具体应用
模型预测控制:线性MPC
模型预测控制(Model Predictive Control, MPC)是一种广泛应用于工业过程控制和自动驾驶等领域的先进控制技术。MPC通过在线解决优化问题来计算控制输入,从而实现系统的最优控制。本文将介绍线性MPC的系统模型、优化问题、LMPC算法,以及单输入系统和多输入系统的具体应用。
系统模型(离散时间线性时不变 (LTI) 系统)
在线性MPC中,系统模型通常假设为离散时间线性时不变(LTI)系统。LTI系统的状态空间模型可以表示为:
x k + 1 = A x k + B u k x_{k+1} = Ax_k + Bu_k xk+1=Axk+Buk
其中:
- x k x_k xk是时间步 k k k的系统状态向量
- u k u_k uk是时间步 k k k的控制输入向量
- A A A 是状态转移矩阵
- B B B 是输入矩阵
输出方程通常为:
y k = C x k + D u k y_k = Cx_k + Du_k yk=Cxk+Duk
其中:
- y k y_k yk 是时间步 k k k的输出向量
- C C C 是输出矩阵
- D D D 是直接传输矩阵
优化问题
在MPC中,控制输入是通过解决一个在线优化问题来确定的。优化问题的目标是最小化一个代价函数(通常是一个二次型函数),并满足系统的约束条件。典型的代价函数包括以下两部分:
- 状态跟踪误差:衡量实际状态与目标状态之间的差距。
- 控制输入:控制输入的大小,避免过大的控制动作。
代价函数通常可以表示为:
J = ∑ i = 0 N − 1 ( x k + i ∣ k T Q x k + i ∣ k + u k + i ∣ k T R u k + i ∣ k ) + x k + N ∣ k T P x k + N ∣ k J = \sum_{i=0}^{N-1} \left( x_{k+i|k}^T Q x_{k+i|k} + u_{k+i|k}^T R u_{k+i|k} \right) + x_{k+N|k}^T P x_{k+N|k} J=i=0∑N−1(xk+i∣kTQxk+i∣k+uk+i∣kTRuk+i∣k)+xk+N∣kTPxk+N∣k
其中:
- N N N是预测时域长度
- Q Q Q 是状态误差权重矩阵
- R R R 是控制输入权重矩阵
- P P P 是终端状态权重矩阵
优化问题需要满足系统的动态方程和控制输入的约束:
x k + i + 1 ∣ k = A x k + i ∣ k + B u k + i ∣ k ∀ i = 0 , … , N − 1 x m i n ≤ x k + i ∣ k ≤ x m a x ∀ i = 1 , … , N u m i n ≤ u k + i ∣ k ≤ u m a x ∀ i = 0 , … , N − 1 \begin{align*} x_{k+i+1|k} &= A x_{k+i|k} + B u_{k+i|k} \quad \forall i = 0, \ldots, N-1 \\ x_{min} &\leq x_{k+i|k} \leq x_{max} \quad \forall i = 1, \ldots, N \\ u_{min} &\leq u_{k+i|k} \leq u_{max} \quad \forall i = 0, \ldots, N-1 \end{align*} xk+i+1∣kxminumin=Axk+i∣k+Buk+i∣k∀i=0,…,N−1≤xk+i∣k≤xmax∀i=1,…,N≤uk+i∣k≤umax∀i=0,…,N−1
LMPC算法
线性模型预测控制(LMPC)算法的步骤如下:
- 状态估计:获取当前状态 x k x_k xk。
- 优化求解:解决当前时刻的优化问题,得到预测时域内的最优控制输入序列 { u k ∣ k , u k + 1 ∣ k , … , u k + N − 1 ∣ k } \{u_{k|k}, u_{k+1|k}, \ldots, u_{k+N-1|k}\} {uk∣k,uk+1∣k,…,uk+N−1∣k}。
- 应用控制:应用当前时刻的控制输入 u k = u k ∣ k u_k = u_{k|k} uk=uk∣k。
- 滚动优化:将预测时域向前推进一个时间步长,重复以上步骤。
单输入系统
对于单输入单输出(SISO)系统,模型和控制输入的表示会更加简单。假设系统状态向量 x k x_k xk为一维向量,控制输入 u k u_k uk也是一维标量。系统模型可以表示为:
x k + 1 = a x k + b u k x_{k+1} = ax_k + bu_k xk+1=axk+buk
输出方程为:
y k = c x k + d u k y_k = cx_k + du_k yk=cxk+duk
优化问题与多输入系统相同,只是矩阵 A A A、 B B B、 C C C、 D D D变成了标量。
多输入系统
对于多输入多输出(MIMO)系统,状态向量 x k x_k xk、控制输入向量 u k u_k uk和输出向量 y k y_k yk均为多维向量。系统模型可以表示为:
x k + 1 = A x k + B u k x_{k+1} = A x_k + B u_k xk+1=Axk+Buk
输出方程为:
y k = C x k + D u k y_k = C x_k + D u_k yk=Cxk+Duk
MIMO系统的优化问题和单输入系统类似,只是需要处理更高维度的矩阵。
代码示例
以下是一个简单的Python代码示例,展示如何实现单输入单输出系统的线性MPC:
import numpy as np
from scipy.linalg import solve_discrete_are
import matplotlib.pyplot as plt
# 定义系统模型
A = np.array([[1.0]]) # 状态转移矩阵
B = np.array([[1.0]]) # 控制输入矩阵
C = np.array([[1.0]]) # 输出矩阵
D = np.array([[0.0]]) # 直通项矩阵
# 定义MPC参数
Q = np.array([[1.0]]) # 状态权重矩阵
R = np.array([[1.0]]) # 控制权重矩阵
N = 10 # 预测时域长度
# 离散时间代数Riccati方程求解P矩阵
P = solve_discrete_are(A, B, Q, R)
# 计算K矩阵
K = np.linalg.inv(B.T @ P @ B + R) @ (B.T @ P @ A)
# 目标设置
x_target = np.array([[5]]) # 目标状态
u_target = 0 # 目标控制输入
# 初始化状态
x = np.array([[0.0]]) # 初始状态
# 仿真时间
T = 50
x_trajectory = []
u_trajectory = []
for t in range(T):
# 计算控制输入
u = -K @ (x - x_target) + u_target
# 应用控制输入并更新状态
x = A @ x + B @ u
# 记录状态和控制输入
x_trajectory.append(x.item())
u_trajectory.append(u.item())
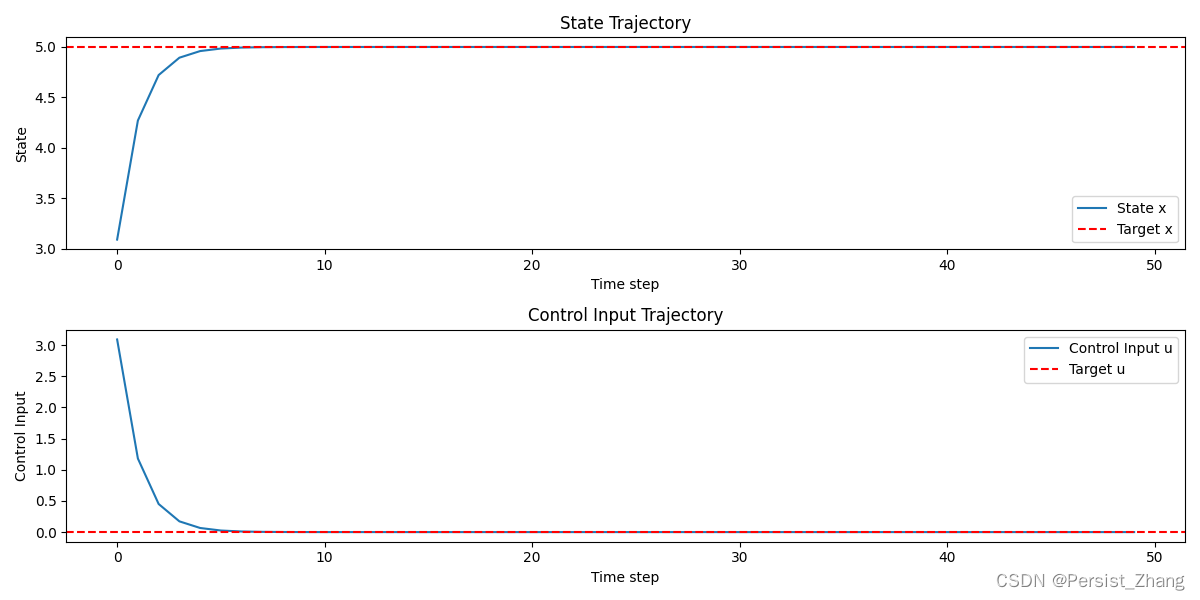
# 绘制结果
plt.figure(figsize=(12, 6))
plt.subplot(2, 1, 1)
plt.plot(x_trajectory, label='State x')
plt.axhline(y=x_target.item(), color='r', linestyle='--', label='Target x')
plt.title('State Trajectory')
plt.xlabel('Time step')
plt.ylabel('State')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(u_trajectory, label='Control Input u')
plt.axhline(y=u_target, color='r', linestyle='--', label='Target u')
plt.title('Control Input Trajectory')
plt.xlabel('Time step')
plt.ylabel('Control Input')
plt.legend()
plt.tight_layout()
plt.show()

代码说明:
-
系统模型定义:
A、B、C、D分别为状态转移矩阵、控制输入矩阵、输出矩阵和直通项矩阵。- 对于SISO系统,所有矩阵都是1x1的。
-
MPC参数:
Q和R是权重矩阵,用于调整状态和控制输入在优化中的重要性。N是预测时域的长度,决定了MPC预测未来多少步。
-
离散时间代数Riccati方程求解:
- 使用
scipy.linalg.solve_discrete_are函数求解P矩阵。 - 计算反馈增益矩阵
K。
- 使用
-
目标设置:
x_target是目标状态。u_target是目标控制输入。
-
初始化状态:
x是初始状态。
-
仿真循环:
- 在每个时间步
t,计算控制输入u,更新状态x,并记录状态和控制输入的轨迹。
- 在每个时间步
-
结果绘制:
- 使用
matplotlib库绘制状态和控制输入的轨迹。
- 使用
该代码实现了一个简单的MPC控制器,能根据给定的线性系统模型和MPC参数在预测时域内优化控制输入,以使系统状态逼近目标状态。
该代码定义了一个简单的SISO系统,并实现了线性MPC算法,最终绘制了系统状态随时间变化的图。
结论
线性MPC是一种强大的控制技术,能够处理复杂的控制问题,尤其是在存在约束和不确定性的情况下。通过在线解决优化问题,MPC可以实现系统状态的最优控制。本文介绍了线性MPC的基本概念、系统模型、优化问题、算法步骤,以及单输入和多输入系统的具体应用,并提供了一个简单的Python代码示例。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 34
34 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)