地球的正常重力场与相关公式
文章目录地球的正常重力场定义图解圆球假设下的地球重力旋转椭球假设下的地球重力历史上重要的正常重力模型重力与高度的关系实用公式PSINS中相关代码地球重力场的球谐函数模型地球的正常重力场定义在地球的大地水准体描述中,水准体表面是地球实际重力场的一个等位面,每一点的重力方向均与该点所在等位面相垂直,实际的重力方向一般称为天文垂线,或称真垂线。由于实际地球内部密度分布不均匀,并且表面凹凸不平,大地水准面
地球的正常重力场
定义
在地球的大地水准体描述中,水准体表面是地球实际重力场的一个等位面,每一点的重力方向均与该点所在等位面相垂直,实际的重力方向一般称为天文垂线,或称真垂线。由于实际地球内部密度分布不均匀,并且表面凹凸不平,大地水准面不规则﹐所以实际水准面上重力的大小和方向也不规则。与地球的几何形状描述类似,也希望使用一个简单的数学函数来拟合地球重力场,这个简单函数表示的重力场就称为正常重力场。
图解
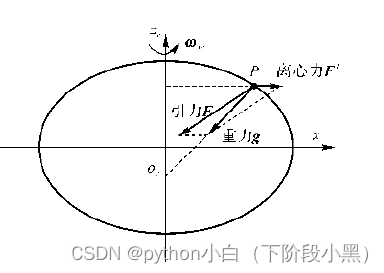
如下图所示,地球上某一点的重力是地球万有引力与离心力共同作用的结果

圆球假设下的地球重力
若将地球视为圆球体并且认为密度均匀分布﹐那么地球引力指向地心,可推导得公式:

旋转椭球假设下的地球重力
对于地球的旋转椭球体描述,假设在椭球表面上的重力矢量处处垂直于表面,也就是说,旋转椭球表面为重力的一个等位面
历史上重要的正常重力模型
(1)1901年,德国人赫尔默特(F.R. Helmert)根据当时波斯坦系统的几千个重力测量结果,给出正常重力公式为

(2)1909年,美国人海福特(J.F.Hayford)根据美国当时的大地测量结果给出了一个参考椭球,它的赤道半径为R=6378 388 m,几何扁率为f=1/297.0;1928年,芬兰人海斯卡宁(W. A. Heiskanen)根据当时的重力测量结果计算出正常地球模型在赤道上的重力为9.78049m/s2

1930年,国际大地测量与地球物理联合会(IUGG)将上式定为国际正常重力公式。
(3)利用现代卫星测量技术,IUGG于1979年通过了1980大地参考系﹐与其对应的正常重力公式为

(4)1987年,WGS-84(World Geodetic System 1984)大地坐标系给出的地球参数为


重力与高度的关系
在惯性导航系统中常涉及椭球高,海拔高和气压高等几种高度的测量和计算,它们之间存在一定的差别:
①椭球高度又叫大地高,指在一定的地球椭球模型下,被测点与其在椭球面上投影之间的距离,椭球高是一个纯粹的几何概念,选择的椭球模型不同高度也不一样;
②海拔高度也称绝对高度,它是被测点高出大地水准面的垂直距离;
③气压高度是通过测量大气压力而实现的,海拔高度上升,气压下降,通过测量被测点处的气压,再参考标准大气压模型而算得海拔高度值。
对于惯导系统而言,通常不需对椭球高与海拔高加以细致区分。
实用公式
地球表面附近正常重力随纬度和高度变化的实用计算公式如下:

PSINS中相关代码
在严老师的源码中,也给出了这项的代码
eth.g = eth.g0*(1+5.27094e-3*eth.sl2+2.32718e-5*sl4)-3.086e-6*pos(3); % grs80
地球重力场的球谐函数模型
正常重力场描述的是规则地球假设下产生的重力场,但实际地球并不规则。正常重力场只是实际重力场的一个较好的近似,为了更加细致地刻画实际地球的重力场,需引入球谐函数和重力位等概念,这在高精度惯性导航系统的重力场建模和补偿中十分有用。据统计,与正常重力相比,应用高精度的重力场模型可提升约0.1 n mile/h(1 n mile=1.852 km)的惯性导航精度。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 2
2 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)