电机FOC控制
由于电机工作的电流一般很大,所以采样电阻的阻值非常小,甚至和导线的电阻接近了,因而实际的采样电路PCB设计的时候还有一些讲究,比如使用开尔文接法,正点原子的电流采样电阻只有20毫欧。同步电机的转速等于定子旋转磁场的转速,而异步电机的转速落后于定子旋转磁场的转速。简单地说,BLDC由于反电动势接近梯形波,所以肯定是会有上面说的抖动问题的,但是转一圈抖6下太明显了,如果我增加电机槽、极对数(也就是磁铁
【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术 - 知乎 (zhihu.com)
无刷电机其实可以分为无刷直流电机(BLDC,我们航模上都是用这种)和永磁同步电机(PMSM),结构大同小异,主要区别在于制造方式(线圈绕组方式)不同导致的一些特性差异(比如反电动势的波形)。
PMSM是交流永磁伺服电动机的一种,其转子使用永久磁铁代替绕线。其特点是效率高、功率因数高等,且结构简单。在中小容量高精度传动领域,广泛采用永磁同步伺服电机。
FOC,直译是磁场定向控制,也被称作矢量控制,是目前无刷直流电机(BLDC)和永磁同步电机(PMSM)高效控制的最优方法之一。
普通电调都只能控制电机转速,而FOC可以进行电流(力矩)、速度、位置三个闭环控制
FOC驱动器的噪音会比电调小很多,原因是普通电调采用方波驱动,而FOC是正弦波
电调驱动不同的BLDC不需要进行参数整定,而FOC需要。FOC相比于普通的电调,可以做到电机在低速状态下的精准控制,而电调低速下会有明显的抖动。
无刷电机的电压和KV值决定了电机转速,而电机的转速就决定了换向的频率
简单地说,BLDC由于反电动势接近梯形波,所以肯定是会有上面说的抖动问题的,但是转一圈抖6下太明显了,如果我增加电机槽、极对数(也就是磁铁对数),那以前是360度里面抖6下,现在变成120度里面抖6下,甚至更小,这样“颗粒感”不就变得更小了
由于PMSM的反电动势被设计为正弦波的形状,我们用软件和算法结合PWM技术将方波转变成等效的SPWM正弦波或者SVPWM马鞍波,再来驱动电机
无刷电机的驱动电路主要使用三相逆变电路来实现,所谓逆变电路,即把直流电变换为交流电。半桥电路其实很简单,就是两个MOS管组成的上桥臂和下桥臂,中间引出一条输出线
实际上半桥驱动电路的实现会比上面的分析要复杂一些,比如需要考虑开关管的开关频率、开启和关断时间不对称、死区问题等等,实际设计的FOC驱动使用的是专用的半桥MOS栅极驱动IC来实现的
拿到这样一个电机,手动匀速转动它的转子,然后用示波器观察它的三相输出电压(也就是反电动势产生的电压),会看到什么波形呢?其实很自然可以想到,我们会得到3根正弦曲线,而且三根曲线两两相位差为120°
发电机反过来就是电动机啦,所以假如反过来我们在三相无刷电机的三相线圈上输入上述三相正弦电压,那么就可以驱动无刷电机平稳高效地旋转了。而这也是FOC驱动无刷电机的基本手段,即通过计算所需电压矢量,使用 SVPWM 技术产生调试信号,驱动三相逆变电路,合成出等效的三相正弦电压驱动电机。
电机始终产生一个恒定的力矩(也就是恒定的电流,因为力矩和电流成正比),转速和电压成正比

图中的速度位置反馈可以采用编码器,或者霍尔传感器等能感应转子位置的传感器。这种算是有感的FOC控制方法,其实FOC可以做到无感控制(也就是不需要编码器等额外的传感器),当然控制算法也会更加复杂,需要引入前馈控制、观测器等概念,无感的好处就是结构安装更简单,可以避免位置传感器失效的风险等等

“矢量控制”其实就是在做解耦,确实很有道理!
如果要平稳地驱动三相电机转动,我们就需要生成三个相位相差120度的正弦波,但是我们最终的控制对象是MOS管的开通和关断,只有电压最大值和0值两个状态啊,怎么去生成连续变化的正弦波呢?对了,用前面提到的PWM技术就可以做到,所谓SPWM就是这么干的PWM的占空比变化规律,这样合成的PWM波,经过低通滤波器之后,其实就等效为了一个正弦波!所以SPWM就是在PWM的基础上用正弦波来调制合成的具有正弦波规律变化的方波。不过SPWM调试方式在FOC实现中并不常用,原因是SPWM要比后面要说的SVPWM的母线电压利用率要低15%
对电机的三个相电流进行采样,这一步会使用串联的采样电阻(Shunt)进行电流采样。由于电机工作的电流一般很大,所以采样电阻的阻值非常小,甚至和导线的电阻接近了,因而实际的采样电路PCB设计的时候还有一些讲究,比如使用开尔文接法,正点原子的电流采样电阻只有20毫欧。但是我们实际电路设计时可以不使用三个采样器(实际有单采样电阻、双采样电阻和三采样电阻接法),只需要两个就够了。因为由基尔霍夫电流定律(KCL),在任一时刻,流入节点的电流之和等于流出节点的电流之和,也就是说只需要知道其中两个就可以计算出第三个了。

CLARKE:三相变两相,两个波仍是正弦波,变换的原理是电流产生的磁场相等,满足矢量变换法则,PACK:线性化,将两个正弦波变换为线性变量

在FOC控制中主要用到三个PID环,从内环到外环依次是:电流环、速度环、位置环。
SVPWM:由6个MOS组成的三相全桥电路,SVPWM算法本质是计算6个MOS何时导通关闭,共8中组合,6中非零矢量,2中零矢量(全是1或全是0)

举例b与c并联再和a串联,一共可以组成8种电压组合

反PACK变换:即将PID输出的Ud和Uq的期望值重新转换为α和β坐标
一系列操作的目的就是为了解耦,将三相波转化为可以控制的D和Q的值
异步电机和同步电机的区别:
同步电机的转速等于定子旋转磁场的转速,而异步电机的转速落后于定子旋转磁场的转速。同步单机的定子电枢绕组需要交流电,转子励磁绕组要直流电供电;异步电机的定子绕组由交流电源供电,转子不需要电。同步电机以同步速度运行与负载无关,rpm=120f/p;异步电机的速度取决于它的负载,随负载增加而降低,且总是小于同步速度。 rpm=120f/p-s,s代表滑差。同步电机的转子结构相对复杂,有直流励磁绕组,因此需要外加励磁电源,通过滑环引入电流;因此同步电机的结构相对比较复杂,造价、维修费用也相对较高。
//
RM的无刷:
GM6020是一款内部集成驱动器的高可靠性直流无刷电机,可为低转速、大扭矩直接驱动应用提供高性能的解决方案。驱动器采用磁场定向控制(FOC)算法,配合高精度的角度传感器,能实现精确的力矩和位置控制。电机具备异常提示和保护功能;支持多种通信方式,方便控制和升级。
M3508减速电机套装为高性能机器人平台而生,小巧的体积提供强劲动力与丰富的智能保护。电机与减速器完美匹配,配备定制FOC电调,适用于10-50Kg重量级的机器人移动平台和执行机构。搭配C620电调使用时,具有位置反馈、温度检测和信息存储的功能。RoboMaster M2006动力系统由RoboMaster M2006 P36直流无刷减速电机和RoboMaster C610无刷电机调速器组成,具有控制精度高,输出功率大,体积小等特性。相比于RoboMaster M3508动力系统,转速接近,体积和重量大幅下降,故应用场景更为广泛。电调采用合封单片机技术,电源主控驱动一体化。

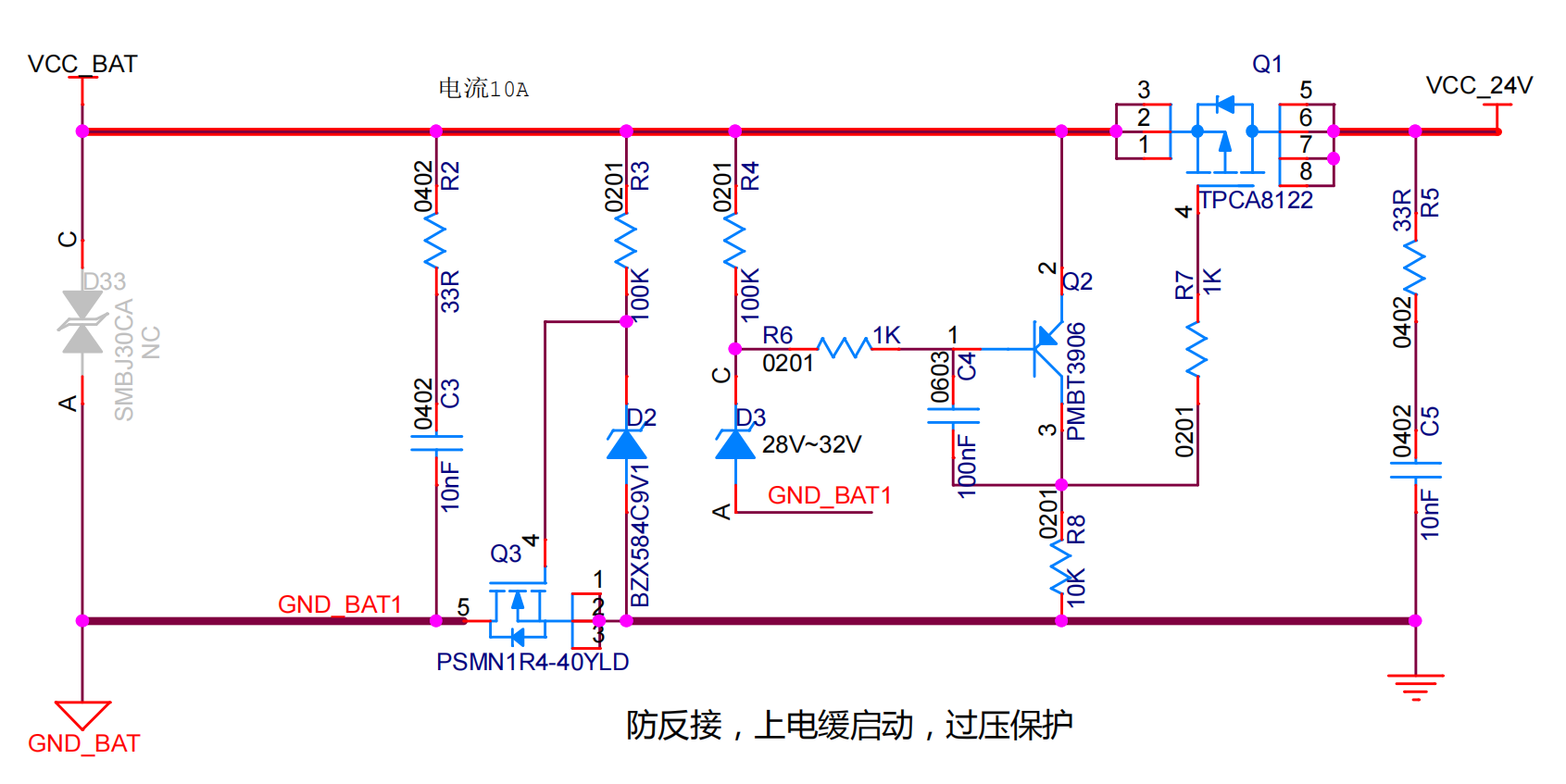
一款优秀的单片机系统系统基本的保护(大疆方案):


CAN_TX/RX转换到CAN_H/L的过程:

通信连接插头参考:1.25T-7-2AW
交互式BOM:(DIY时很方便)

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 14
14 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)