【机器学习】高斯过程回归原理推导
1、前言高斯过程,是随机过程的一种。高斯过程回归,和线性回归有些相似,总之就是用数据去拟合出一条线,然后做预测。2、引入在了解高斯过程之前。我们得知道什么是高斯分布。高斯分布,在一维的时候,给定期望和方差,可以唯一确定一个概率分布。在期望为0,方差为1高斯分布,其密度函数为这是一维的情况,同理的还有多维高斯分布。所谓多维高斯分布,其实就是将原本一维的高斯分布在不同方位堆叠,如果维度之间存在关系,则
1、前言
高斯过程,是随机过程的一种。高斯过程回归,和线性回归有些相似,总之就是用数据去拟合出一条线,然后做预测。
数学基础:【概率论与数理统计知识复习-哔哩哔哩】
2、引入
在了解高斯过程之前。我们得知道什么是高斯分布。高斯分布,在一维的时候,给定期望和方差,可以唯一确定一个概率分布。在期望为0,方差为1高斯分布,其密度函数为

这是一维的情况,同理的还有多维高斯分布。所谓多维高斯分布,其实就是将原本一维的高斯分布在不同方位堆叠,如果维度之间存在关系,则会就不能简单堆叠。假如我们有p维的高斯分布,那么相应的就要给出p维的期望,而对应的方差就变成了 p × p p\times p p×p维协方差矩阵 刻画不同维度之间的关系 \boxed{刻画不同维度之间的关系} 刻画不同维度之间的关系。
那如果说我们的维度扩展到了无限维呢?当维度扩展到无限维,我们则称为高斯过程。相应的,既然是无限维, 那么理应我们就该用一个无限维的期望和协方差矩阵去表达 \boxed{那么理应我们就该用一个无限维的期望和协方差矩阵去表达} 那么理应我们就该用一个无限维的期望和协方差矩阵去表达。但是无限维怎么表达出来?没错!就是用函数。我们就要让期望遵循一个函数,协方差矩阵也同样遵循一个函数即可。
3、高斯过程
不严谨的来说,实际上就是定义在连续域上的随机变量的集合,这个连续域一般是空间或者时间。并且对任意一个(或多个)时间或者空间,其仍然服从高斯分布。其可表示为
f
(
x
)
∼
G
P
(
m
,
K
)
f(x)\sim GP(m,K)
f(x)∼GP(m,K)
即 f ( x ) 是服从高斯过程,其中 m 为均值函数, K 为协方差函数 \boxed{即f(x)是服从高斯过程,其中m为均值函数,K为协方差函数} 即f(x)是服从高斯过程,其中m为均值函数,K为协方差函数
4、高斯过程回归
首先什么是线性回归,所谓线性回归,就是用一条直线去拟合现有的数据,然后进行预测,即

但是说,假如我们的数据它的轨迹就不是线性的,而是这样呢?

一般情况下,面对这种问题,一种思路就是进行数据升维。一般情况下,我们认为高维空间比低维空间更加容易线性可分。
比如,我们有一个点
x
x
x,其有两个维度,将其表示成向量,则
x
=
(
x
1
x
2
)
T
x =\begin{pmatrix} x^1 &x^2 \end{pmatrix}^T
x=(x1x2)T
生成三维,第三个维度我们作
x
=
(
x
1
x
2
(
x
1
−
x
2
)
2
)
T
x =\begin{pmatrix} x^1 &x^2 &(x^1-x^2)^2 \end{pmatrix}^T
x=(x1x2(x1−x2)2)T
再来回顾一下我们的线性回归的直线方程
f
(
x
)
=
w
T
x
f(x)=w^Tx
f(x)=wTx
如果对数据x进行升维操作,升维之后的数据我们用
ϕ
(
x
)
\phi(x)
ϕ(x)表示,那么就得到
f
(
x
)
=
w
T
ϕ
(
x
)
f(x)=w^T\phi(x)
f(x)=wTϕ(x)
并且,我们可以认为此时
f
(
x
)
f(x)
f(x)就是一个服从高斯过程的函数,可以理解成每一个点的x轴就是对应高斯过程中的某个时间或者空间。
f
(
x
)
∼
G
P
(
m
,
K
)
f(x)\sim GP(m,K)
f(x)∼GP(m,K)
这里的
m
m
m就是
f
(
x
)
f(x)
f(x)的期望函数,而
K
K
K就是协方差函数。
其实也就是对于任意一个点 x ,它都有自己的一个属于期望和方差,也就是每个点都服从自己的一个高斯分布 \boxed{\mathbf{其实也就是对于任意一个点x,它都有自己的一个属于期望和方差,也就是每个点都服从自己的一个高斯分布}} 其实也就是对于任意一个点x,它都有自己的一个属于期望和方差,也就是每个点都服从自己的一个高斯分布。那么将所有的数据点联合起来,所有点的期望堆叠起来,就成了期望函数,所有点的方差(或协方差矩阵)堆叠起来,加上数据点之间是否存在关系,就成了协方差矩阵。
5、求解
我们先定义一些量
X
=
(
x
1
x
2
⋯
x
n
)
n
×
p
T
Y
=
(
y
1
y
2
⋯
y
n
)
n
×
1
T
X=\begin{pmatrix} x_1 & x_2 & \cdots & x_n \end{pmatrix}^T_{n\times p} \\Y=\begin{pmatrix} y_1 & y_2 & \cdots & y_n \end{pmatrix}^T_{n\times 1}
X=(x1x2⋯xn)n×pTY=(y1y2⋯yn)n×1T
我们知道,要去做预测每一个点对应的y值,都是要经过
f
(
x
i
)
=
w
T
x
i
y
i
=
f
(
x
i
)
+
ϵ
f(x_i)=w^Tx_i \\y_i=f(x_i)+\epsilon
f(xi)=wTxiyi=f(xi)+ϵ
其中
ϵ
∼
N
(
0
,
σ
2
)
\epsilon \sim N(0,\sigma^2)
ϵ∼N(0,σ2)的过程噪声。也就是,对于每一个样本的,他都是要先计算直线方程,然后再加上一个过程噪声。
在传统的贝叶斯线性回归中,我们认为权重 w w w是随机变量,即我们就是要先求出后验 P ( w ∣ X , Y ) P(w|X,Y) P(w∣X,Y)。
然后再计算出
f
(
x
)
f(x)
f(x),再到
y
y
y。即
P
(
y
∗
∣
X
,
Y
,
x
∗
)
=
∫
w
P
(
y
∗
∣
w
,
X
,
Y
,
x
∗
)
P
(
w
∣
X
,
Y
,
x
∗
)
d
w
=
∫
w
P
(
y
∗
∣
w
,
x
∗
)
P
(
w
∣
X
,
Y
)
d
w
P(y^*|X,Y,x^*)=\int_wP(y^*|w,X,Y,x^*)P(w|X,Y,x^*)dw=\int_wP(y^*|w,x^*)P(w|X,Y)dw
P(y∗∣X,Y,x∗)=∫wP(y∗∣w,X,Y,x∗)P(w∣X,Y,x∗)dw=∫wP(y∗∣w,x∗)P(w∣X,Y)dw
y
∗
,
x
∗
y^*,x^*
y∗,x∗为我们要预测的点。具体可以看【机器学习】贝叶斯线性回归
在高斯过程回归中,从函数的角度去理解的话,实际上我们就不管那个后验w了,而是从函数 f ( x ) f(x) f(x)出发。
什么意思呢?比如,现在我们作预测,预测值标记为 y ∗ , x ∗ y^*,x^* y∗,x∗。
那么就会有
f
(
x
∗
)
=
w
T
x
∗
y
∗
=
f
(
x
∗
)
+
ϵ
f(x^*)=w^Tx^*\\ y^*=f(x^*)+\epsilon
f(x∗)=wTx∗y∗=f(x∗)+ϵ
按照正常的思路,对这个预测问题,里面的权重w必然是后验,我们可以任意取设定。
但是在如果是从 f ( x ) 的角度去看的话,却不是这样,里面的 w 是先验 \boxed{\mathbf{但是在如果是从f(x)的角度去看的话,却不是这样,里面的w是先验}} 但是在如果是从f(x)的角度去看的话,却不是这样,里面的w是先验
对于我们的训练数据集也是如此
f
(
x
)
=
w
T
x
y
=
f
(
x
)
+
ϵ
(1.1)
f(x)=w^Tx\\ y=f(x)+\epsilon\tag{1.1}
f(x)=wTxy=f(x)+ϵ(1.1)
最终我们要求出的是
y
∗
y^*
y∗,所以我们可以这样
P
(
y
∗
∣
X
,
Y
,
x
∗
)
=
P
(
y
∗
∣
y
,
x
∗
)
(1.2)
P(y^*|X,Y,x^*)=P(y^*|y,x^*)\tag{1.2}
P(y∗∣X,Y,x∗)=P(y∗∣y,x∗)(1.2)
其中
y
y
y来自式(1.1),根据式(1.1),
y
y
y已经充分代表了
X
,
Y
X,Y
X,Y这些数据点,故可直接用
y
y
y去代表。
或者我们不妨去假设的通俗一些,将式(1.1)中 y y y当作是先验(因为它的w)是先验。而 y ∗ ∣ y , x ∗ y^*|y,x^* y∗∣y,x∗自然就是由先验到了后验的过程。
如果还是有点迷糊,看一下接下来的流程估计就懂了。
6、流程
首先,要先求出先验 f ( X ) f(X) f(X)。不是 f ( x ) f(x) f(x)吗?怎么变成这玩意儿了?呃,主要前面符号没对齐,懒得改了。我们前面说过,高斯过程回归是要我们所有的点联合组成的期望和协方差函数。而我们前面用 X X X表示了数据集的横坐标,那自然就是要求的是 f ( X ) f(X) f(X),所以请不要感到疑惑( f ( X ) f(X) f(X)代表全部的训练数据)
我们之前说过,要对x升维,
假设从
p
维升成
q
维
\boxed{\mathbf{假设从p维升成q维}}
假设从p维升成q维,得到的结果我们同样表示为
Φ
=
(
ϕ
(
x
1
)
ϕ
(
x
1
)
⋯
ϕ
(
x
n
)
)
n
×
q
T
\Phi=\begin{pmatrix} \phi(x_1) & \phi(x_1) & \cdots & \phi(x_n) \end{pmatrix}^T_{n\times q}
Φ=(ϕ(x1)ϕ(x1)⋯ϕ(xn))n×qT
所以由
f
(
X
)
=
w
T
Φ
=
Φ
T
w
f(X)=w^T\Phi=\Phi^Tw
f(X)=wTΦ=ΦTw
我们前面说过,此时的w是先验,是我们任意假设的,我们假设它
w
∼
N
(
0
,
Σ
)
w \sim N(0,\Sigma)
w∼N(0,Σ)(这里好多人都对这个有问题,我个人认为这个初始化成期望为0,纯粹就是为了简单,并且在很多情况下,我们都会对数据进行均值化,所以设成0。但都说它是先验了,既然是先验,如果我们有先验知识,知道它可能期望为1,那么我们就设为1。如果我们不知道它的期望为多少,就设为0。后面加入数据之后,自然会修正先验的值,但这并不是说先验对结果就没有影响,有是一定有的,但是远远没有我们想的那么重要(预测点距离训练集越近,则先验越不重要。反之则更重要)。
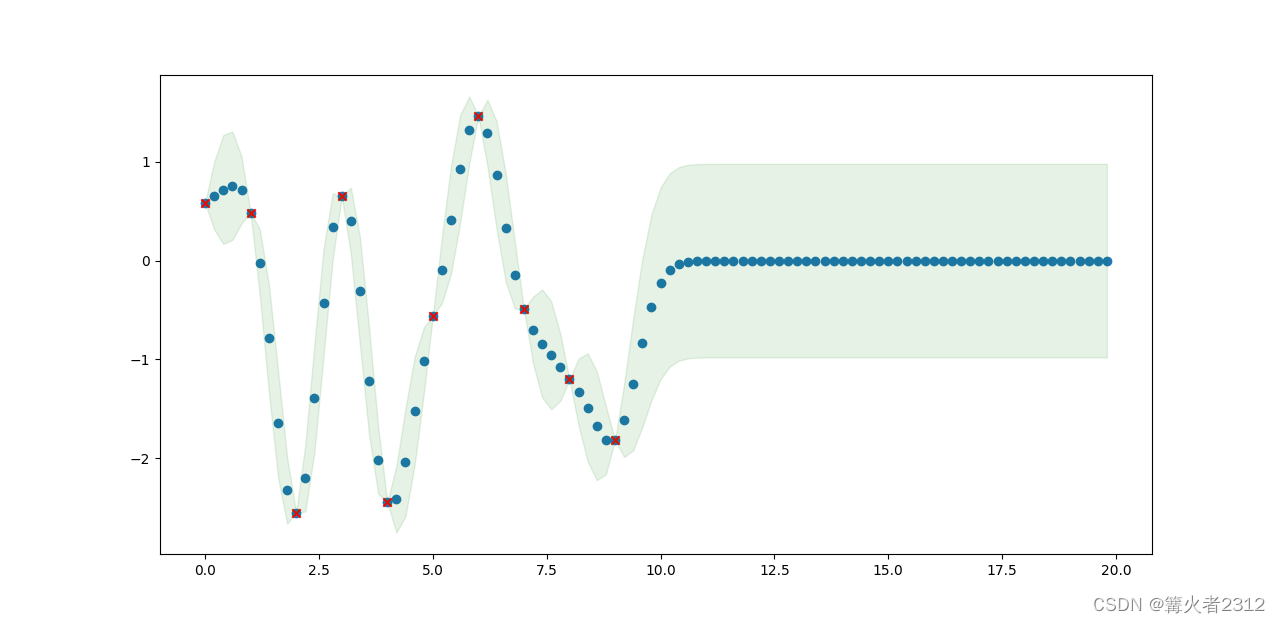
如果你还是不理解这句话,我们可以看看下面的例子(先验均值设为0)

在上面,红色的点是我们的训练集,绿色的点是预测值。阴影部分是每个预测点的置信区间。可以看到,我们的训练集是从0到10,预测值是0到20。在0到10,预测值很正常,置信区间也很小。但超过10以后,预测值就趋近于0。然后置信区间很大。
我们再来看先验均值为1的

看到没有,远离训练集的测试集(10到20)那部分,此时的均值都是为1。
言归正传,我们说过要将
f
(
X
)
f(X)
f(X)当作是一个高斯过程。那就是要求出它的期望函数和协方差函数。我们不妨设为
μ
p
,
Σ
p
\mu_p,\Sigma_p
μp,Σp
μ
k
=
E
[
f
(
X
)
]
=
E
[
Φ
T
w
]
=
Φ
T
E
(
w
)
=
Φ
T
∗
0
=
0
\mu_k=\mathbb{E}[f(X)]=\mathbb{E}[\Phi^Tw]=\Phi^T\mathbb{E}(w)=\Phi^T*0=0
μk=E[f(X)]=E[ΦTw]=ΦTE(w)=ΦT∗0=0
Σ k = E [ ( f ( X ) − μ k ) ( f ( X ) − μ k ) T ] = E [ f ( X ) f ( X ) T ] = E [ Φ T w w T Φ ] = Φ T E [ w w T ] Φ = Φ T Σ Φ (2.1) \begin{equation}\begin{aligned} \Sigma_k=&\mathbb{E}\left[(f(X)-\mu_k)(f(X)-\mu_k)^T\right] \\=&\mathbb{E}\left[f(X)f(X)^T\right] \\=&\mathbb{E}\left[\Phi^Tww^T\Phi\right] \\=&\Phi^T\mathbb{E}\left[ww^T\right]\Phi \\=&\Phi^T\Sigma\Phi \end{aligned}\end{equation}\tag{2.1} Σk=====E[(f(X)−μk)(f(X)−μk)T]E[f(X)f(X)T]E[ΦTwwTΦ]ΦTE[wwT]ΦΦTΣΦ(2.1)
6.1、核函数
我们仔细看里面的 Φ \Phi Φ,这个东西是数据x进行高维映射之后得到的。我们上面提到的是从二维上升到了三维。但假如在实践中,我们要将其升维到的维度很高,难道我们每一次都要去计算出升维后的对应的 ϕ ( x ) \phi(x) ϕ(x)吗?这无疑会大大增加我们的计算量。
那有没有一种方法,能够不计算出 ϕ ( x ) \phi(x) ϕ(x),又能够计算出 Φ T Σ Φ \Phi^T\Sigma\Phi ΦTΣΦ?
一般情况下,我们就是利用核函数,即当有两个点时,令 k ( x 1 , x 2 ) = < ϕ ( x 1 ) , ϕ ( x 2 ) > k(x_1,x_2)=<\phi(x_1),\phi(x_2)> k(x1,x2)=<ϕ(x1),ϕ(x2)>, < > <> <>表示内积。所以对于 Φ T Σ Φ \Phi^T\Sigma\Phi ΦTΣΦ,我们令 k ( x 1 , x 2 ) = < Σ 1 2 ϕ ( x 1 ) , Σ 1 2 ϕ ( x 2 ) > k(x_1,x_2)=<\Sigma^{\frac{1}{2}}\phi(x_1),\Sigma^{\frac{1}{2}}\phi(x_2)> k(x1,x2)=<Σ21ϕ(x1),Σ21ϕ(x2)>。
最后,我们对所有的点都进行转化,此时我们用大写的
K
(
X
,
X
)
K(X,X)
K(X,X)表示,所以
Σ
k
=
K
(
X
,
X
)
\Sigma_k=K(X,X)
Σk=K(X,X)
在这里就仅仅作一点简单的介绍了,具体有哪些核函数,怎么推导的,在这里不作介绍,感兴趣的可自行百度。
得到了高斯过程 f ( x ) f(x) f(x)的参数。那么对于 Y ∼ N ( 0 , K ( X , X ) + σ 2 I ) Y \sim N(0,K(X,X)+\sigma^2\mathbb{I}) Y∼N(0,K(X,X)+σ2I)。 I \mathbb{I} I为单位矩阵。这个不懂的可以看线性动态系统中的概率求解
6.2、问题
所以,假设我们要求解的是 Y ∗ = ( y 1 ∗ y 2 ∗ ⋯ y n ∗ ) Y^*=\begin{pmatrix}y_1^* & y_2^* & \cdots & y_n^*\end{pmatrix} Y∗=(y1∗y2∗⋯yn∗)。为了避免混乱,我们不妨先求出 f ( X ∗ ) = ( x 1 ∗ x 2 ∗ ⋯ x n ∗ ) f(X^*)=\begin{pmatrix}x_1^* & x_2^* & \cdots & x_n^*\end{pmatrix} f(X∗)=(x1∗x2∗⋯xn∗)
那么如何求出 P ( f ( X ∗ ) ∣ Y , X ∗ ) P(f(X^*)|Y,X^*) P(f(X∗)∣Y,X∗)呢?
6.3、定理
给定
x
,
y
∼
N
(
(
μ
x
μ
y
)
,
(
Σ
x
x
Σ
x
y
Σ
y
x
Σ
y
y
)
)
(2.2)
x,y \sim N\begin{pmatrix} \begin{pmatrix} \mu_x \\ \mu_y \end{pmatrix}, \begin{pmatrix} \Sigma_{xx} &\Sigma_{xy} \\ \Sigma_{yx} & \Sigma_{yy} \end{pmatrix} \end{pmatrix}\tag{2.2}
x,y∼N((μxμy),(ΣxxΣyxΣxyΣyy))(2.2)
则
P
(
x
∣
y
)
∼
N
(
x
∣
μ
k
+
Σ
x
y
Σ
y
y
−
1
y
,
Σ
k
)
P(x|y) \sim N(x|\mu_k+\Sigma_{xy}\Sigma_{yy}^{-1}y,\Sigma_k)
P(x∣y)∼N(x∣μk+ΣxyΣyy−1y,Σk)
其中 μ k = μ x − Σ x y Σ y y − 1 μ y \mu_k=\mu_x-\Sigma_{xy}\Sigma_{yy}^{-1}\mu_y μk=μx−ΣxyΣyy−1μy, Σ k = Σ x x − Σ x y Σ y y − 1 Σ y x \Sigma_k=\Sigma_{xx}-\Sigma_{xy}\Sigma_{yy}^{-1}\Sigma_{yx} Σk=Σxx−ΣxyΣyy−1Σyx。对推导过程感兴趣的可以看一下线性动态系统中的概率求解
为什么要引入这个东西呢?我们如果我们将
f
(
X
∗
)
,
Y
f(X^*),Y
f(X∗),Y当作是上面式(2.1)中的x,y呢?这不就行了吗?
f
(
X
∗
)
,
Y
∼
N
(
(
μ
f
μ
Y
)
,
(
Σ
f
f
Σ
f
Y
Σ
Y
f
Σ
Y
Y
)
)
f(X^*),Y \sim N\begin{pmatrix} \begin{pmatrix} \mu_{f} \\ \mu_{Y} \end{pmatrix}, \begin{pmatrix} \Sigma_{ff} &\Sigma_{fY} \\ \Sigma_{Yf} & \Sigma_{YY} \end{pmatrix} \end{pmatrix}
f(X∗),Y∼N((μfμY),(ΣffΣYfΣfYΣYY))
将协方差矩阵转化成核函数,自然得到(
Σ
Y
f
\Sigma_{Yf}
ΣYf推导过程和式(2.1)一致,此处不作推导)。
f
(
X
∗
)
,
Y
∼
N
(
(
μ
f
μ
Y
)
,
(
K
(
X
∗
,
X
∗
)
K
(
X
∗
,
X
)
K
(
X
,
X
∗
)
K
(
X
,
X
)
+
σ
2
I
)
)
f(X^*),Y \sim N\begin{pmatrix} \begin{pmatrix} \mu_{f} \\ \mu_{Y} \end{pmatrix}, \begin{pmatrix} K(X^*,X^*) &K(X^*,X) \\ K(X,X^*) & K(X,X)+\sigma^2\mathbb{I} \end{pmatrix} \end{pmatrix}
f(X∗),Y∼N((μfμY),(K(X∗,X∗)K(X,X∗)K(X∗,X)K(X,X)+σ2I))
我们要求的曾在式(1.2)中提到,转化成比较宽泛的表达就是
P
(
f
(
X
∗
)
∣
Y
,
X
∗
)
=
P
(
f
(
X
∗
)
∣
Y
)
P(f(X^*)|Y,X^*)=P(f(X^*)|Y)
P(f(X∗)∣Y,X∗)=P(f(X∗)∣Y)
原因是
f
(
X
∗
)
f(X^*)
f(X∗)中,根据式(1.1)可知其已经包含了
X
∗
X^*
X∗,所以后面条件中的
X
∗
X^*
X∗可有可无。
所以我们就是要求 P ( f ( X ∗ ) ∣ Y ) P(f(X^*)|Y) P(f(X∗)∣Y)。我们直接套公式就可以了,设其期望为 μ r \mu_r μr,协方差矩阵为 Σ r \Sigma_r Σr。
所以
μ
r
=
μ
f
−
K
(
X
∗
,
X
)
[
K
(
X
,
X
)
+
σ
2
I
]
−
1
μ
Y
+
K
(
X
∗
,
X
)
[
K
(
X
,
X
)
+
σ
2
I
]
−
1
Y
;
Σ
r
=
K
(
X
∗
,
X
∗
)
−
K
(
X
∗
,
X
)
[
K
(
X
,
X
)
+
σ
2
I
]
−
1
K
(
X
,
X
∗
)
;
\mu_r=\mu_{{f}}-K(X^*,X)\left[K(X,X)+\sigma^2\mathbb{I}\right]^{-1}\mu_Y+K(X^*,X)\left[K(X,X)+\sigma^2\mathbb{I}\right]^{-1}Y; \\\Sigma_r=K(X^*,X^*)-K(X^*,X)\left[K(X,X)+\sigma^2\mathbb{I}\right]^{-1}K(X,X^*);
μr=μf−K(X∗,X)[K(X,X)+σ2I]−1μY+K(X∗,X)[K(X,X)+σ2I]−1Y;Σr=K(X∗,X∗)−K(X∗,X)[K(X,X)+σ2I]−1K(X,X∗);
得到
f
(
X
∗
)
f(X^*)
f(X∗)的参数,那么由式(1.1),再简单整理一下,自然可得
Y
∗
∣
f
(
X
∗
)
Y^*|f(X^*)
Y∗∣f(X∗)
Y
∗
∣
f
(
X
∗
)
∼
N
(
μ
f
+
K
(
X
∗
,
X
)
[
K
(
X
,
X
)
+
σ
2
I
]
−
1
(
Y
−
μ
Y
)
,
K
(
X
∗
,
X
∗
)
−
K
(
X
∗
,
X
)
[
K
(
X
,
X
)
+
σ
2
I
]
−
1
K
(
X
,
X
∗
)
+
σ
2
I
)
Y^*|f(X^*) \sim N(\mu_{f}+K(X^*,X)\left[K(X,X)+\sigma^2\mathbb{I}\right]^{-1}(Y-\mu_Y),\\ K(X^*,X^*)-K(X^*,X)\left[K(X,X)+\sigma^2\mathbb{I}\right]^{-1}K(X,X^*)+\sigma^2\mathbb{I})
Y∗∣f(X∗)∼N(μf+K(X∗,X)[K(X,X)+σ2I]−1(Y−μY),K(X∗,X∗)−K(X∗,X)[K(X,X)+σ2I]−1K(X,X∗)+σ2I)
7、结束
以上,便是高斯过程回归的全部内容了,推导过程并不严谨。如有问题,还望指出,阿里嘎多。


开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 8
8 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)