SLAM从入门到精通(基于ros的反光柱定位)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】我们看论文或者看书的时候,讲的最多的一般就是基于自然环境的定位。不管是激光雷达,还是视觉,其实本身还有很多的不确定性。而对企业、工厂来说,大部分情况下没有办法容忍这种不确定性的。所以很多时候,企业里面用的定位技术往往不是那么高大上的技术,比如激光就用反光柱,视觉就用二维码等等。这里反光柱定位多用于
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
我们看论文或者看书的时候,讲的最多的一般就是基于自然环境的定位。不管是激光雷达,还是视觉,其实本身还有很多的不确定性。而对企业、工厂来说,大部分情况下没有办法容忍这种不确定性的。所以很多时候,企业里面用的定位技术往往不是那么高大上的技术,比如激光就用反光柱,视觉就用二维码等等。这里反光柱定位多用于大型物流设备,也算是用的比较多的一种定位方法。
ros上面其他slam算法很多,但是反光柱的算法没怎么提,这里面最大的原因可能是因为商业的考虑,当然也可能是不屑一顾。但反光柱本身如果做的好,其实是真的可以帮企业挣钱的。所以,我们如果想学习反光柱定位的话,可以找一些开源的博客来看下,csdn下面的这一个专栏就有很大的参考意义。
https://blog.csdn.net/weixin_48702107/category_11927168.html本身总共有12篇文章,我们可以简单梳理一下,挑出对自己最有价值的那个部分。当然,这些文章中的内容对于一个产品来说还是远远不够的,不过可以用它来进行反光柱入门。下面,我们一起来学习下。
1、查找反光柱最强点
反光柱有一个很大的特点,那就是对于激光的反射强度特别高,这是一个非常明显的特点。当然这也是反光柱本身区别于其他自然物最重要的特征。一般反光柱就是一个圆柱体,圆柱体之外包着一个反光贴,直径大约7-8cm左右。所以如果环境中只有一个反光柱的话,可以通过强度比较的方法,找出反光率最大的那个点,其实就知道了反光柱的大体位置了。
2、查找多个反光柱
前面只是讨论了一个反光柱的情形,但是如果是多个反光柱的话,简单通过最大值的方法,是没有办法找出反光柱的位置的。这个时候,就要通过适合的阈值,将雷达的离散点拆分成几个区域,每一个区域就代表着一个反光柱。找到这些区域之后,再根据中间点就可以找到反光柱的基本位置了。经过这一步,我们已经成功从识别单个反光柱,发展到识别多个反光柱。
3、反光柱rviz可视化
rviz本身不定义反光柱,所以可以通过Marker信息将反光柱绘制出来,这样也方便调试。相关内容,之前的文章也涉及过,
https://blog.csdn.net/feixiaoxing/article/details/133973755?spm=1001.2014.3001.55014、确定多反光柱的位置
和2不同的是,这里我们需要进一步确定反光柱中心的位置。假设某一个区域代表一个反光柱,它的起始角度和末尾角度的中间值就可以看成是圆心的入射角度。通过中值查找,找出它的r_laser和theta角度之后,我们就可以求解出对应的x和y,其中反光柱的半径假设为r_landmark,
x = (r_laser + r_landmark) * cos(theta)
y = (r_laser + r_landmark) * sin(theta)有了x和y,借助于rviz的可视化,就可以将反光柱绘制出来了。
5、三角函数法求解圆心
相比较4求解圆心的方法,三角函数是另外一种计算圆心的方法,有兴趣的同学可以继续看下。暂时没有时间了解的同学,可以先忽略一下。
https://blog.csdn.net/weixin_48702107/article/details/1259287586、对拟定圆心进行保存和读取
保存和读取本身就是一个文件的保存和访问操作,这个没有什么可说的。一般来说,对于圆心的保存可以看成反光柱地图的保存,而读取则可以看成是反光柱地图的加载。不过当前保存的信息还是基于lidar坐标系,后期需要更改成全局坐标系。
我们的机器人停在一个固定的地方,这个时候就可以通过反光柱扫描的方法生成一个反光柱地图。后期机器人移动的时候,就可以通过进一步反光柱匹配,经过计算得到当前机器人的位姿信息(x/y/theta)。
7、反光柱匹配
如果机器人处于静止状态,本身机器人的位置就可以看成是(0,0,90)。但是一旦机器人移动开来,那么这个时候,lidar看到的反光柱数量有可能会发生了改变。不仅如此,对于lidar坐标系来说,它所看到的反光柱坐标其实也发生了改变。但是,这个里面有一点没有发生改变的,那就是不同反光柱之间的距离其实是不变的。因此这个时候,我们就要根据距离对新扫描的反光柱和之前反光柱地图中的数据,进行一个距离匹配。
匹配之后,我们拿到了之前反光柱中圆心的位置,也就可以计算出小车的位姿信息了。
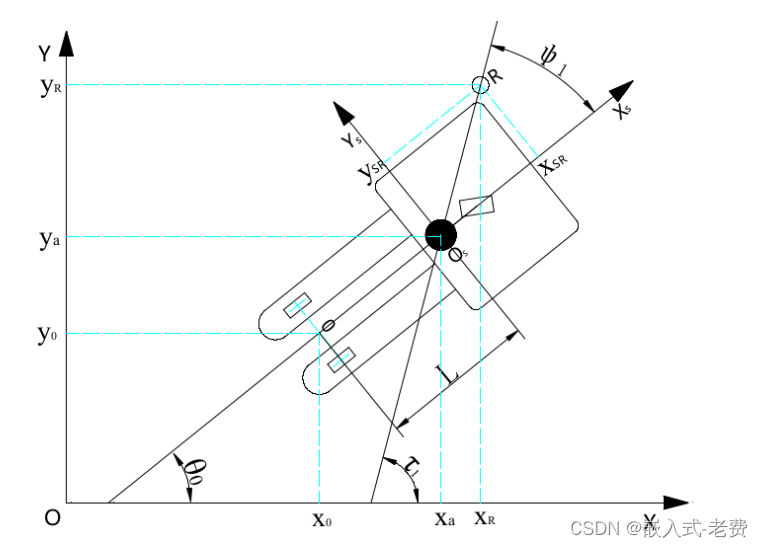
8、坐标转换

这里的坐标系转换,主要就是将lidar坐标系转成世界坐标系。现在假设机器人的坐标是(x0/y0/theta0),机器人lidar位于后轮法线的正前方,距离是l,那么这个时候lidar的全局位姿就是,
xa = x0 + l * cos(theta0)
ya = y0 + l * sin(theta0)而lidar的扫描点坐标假设为(xr/yr),其中xr和yr可以依赖于lidar的r、angle来进行计算,那么扫描点在全局坐标下的位置为,
x_glb = xa + xr * cos(theta0) - yr * sin(theta0)
y_glb = ya + xr * sin(theta0) + yr * cos(theta0)将上面的xa和ya结论带入,
x_glb = x0 + l * cos(theta0) + xr * cos(theta0) - yr * sin(theta0)
y_glb = y0 + l * sin(theta0) + xr * sin(theta0) + yr * cos(theta0)这个时候我们假设小车最初的位置是(0/0/90),这样就可以计算出全局坐标下的反光柱位置,有兴趣一点的话,可以把周围场景的轮廓也记录一下。
9、初步定位
初步定位的方法主要还是基于三边测量的原理。这里初步定位只是计算了x和y,没有计算机器人的theta角。有兴趣的同学可以看一下初步定位的计算流程,
https://blog.csdn.net/weixin_48702107/article/details/126075770希望手动推一下计算过程的同学,可以直接看这个图尝试一下,

10、动态记录
所谓的动态记录,就是运动过程中如果发现新的反光柱,也进行保存处理。当新反光柱加进来之后,这样新反光柱就变成了旧反光柱,用这个刚加进来的旧反光柱计算位姿后,去发掘更多的新反光柱。
11、动态匹配定位
和动态记录一样,主要是优化6的流程,将保存的反光柱地图从lidar坐标系一步升级为全局坐标系的数据。之前是先求解lidar的全局位置,而后转化成机器人的全局位置,这里做了一步到位。优化之后,小车也可以动态计算出位置信息了。
https://blog.csdn.net/weixin_48702107/article/details/12612916612、位姿发布
在第9步过程中当时只是求解出了lidar的xa和ya,其实根据8中的公式,找一个反光柱,就可以分别求出cos(theta0)和sin(theta0)的数值。借助于cos(theta0)和sin(theta0)就可以知道机器人的角度。讲究一点的话,可以找三根反光柱,做一个平均值计算。这样,有了x/y/theta之后,小车本身的位姿信息其实就算被求解出来了,当然也就可以发布了。
x_glb = xa + xr * cos(theta0) - yr * sin(theta0)
y_glb = ya + xr * sin(theta0) + yr * cos(theta0)x_glb和y_glb是识别到的反光柱全局位置,xa和ya是三角定位法计算出来的lidar坐标。这样就可以求解出cos(theta0)、sin(theta0),也就求解出来了theta0角度。
不想手动算的话,就用矩阵算一下,即
有了theta0,我们也就知道了小车的全局坐标x和y了。
x0 = xa - l * cos(theta0)
y0 = ya - l * sin(theta0)13、总结
至此反光柱定位的方法已经被总结出来了,但目前为止,这个流程最多算一个demo,离实际产品还有一定距离,需要我们不断迭代和完善才行。最后还是非常感谢这位实习同学的专栏,它可以帮助很多同学了解一下反光柱定位究竟是怎么做的。
理论上反光柱定位也可以做成slam定位的形式。即,一开始扫描到几个反光柱,后续通过这几个反光柱获得新的反光柱位置,并且加入到地图当中,这就是典型的slam形式,最终留下来的反光柱全局位置就是反光柱地图。当然,保守一点,我们先用gmapping和amcl构建一个栅格地图,借助于栅格地图和雷达扫描来构建、优化反光柱地图,这些都是可以的。具体怎么做,还是看不同厂家自己的做法。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 0
0 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)