PolSARpro v6.0之Sentinel-1A Wishart与SVM监督分类
这里写自定义目录标题前言数据源感兴趣区的提取合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入前言距离上次PolSARpro处理..
PolSARpro v6.0之Sentinel-1A Wishart与SVM监督分类
(原创文章,转载请注明来源,谢谢!)
前言
(前方多图高能预警,万字长文,希望你能耐心看完!)
首先告诉大家一个好消息。Eric Pottier教授的PolSARpro已更新到V6.0版本,各位可以到网址( https://www.ietr.fr/polsarpro-bio/ )自行下载。但是该版本仍在开发中,经过本人的测试,存在不少bug(例如没有帮助文档),各位根据实际情况使用。该版本较V5版本的重大改进是在生物量估算模块方面,该版本的简单介绍文档见百度云盘链接:链接:https://pan.baidu.com/s/1FJkhxkhkwtiEoICDRD19-A
提取码:h9b1 。感谢Eric Pottier教授,也希望该版本在后面能逐步完善。
距离上次PolSARpro处理Sentinel 1A的文章已近三月,期间许多人问我相关的问题,其中问得较多的是感兴趣区域的提取(或者说是掩膜提取),本文将对该操作进行介绍,并介绍PolSARpro中的Wishart监督和SVM监督分类过程(上次因为时间原因,没有详细介绍监督分类步骤,这次补上),希望可以给PolSAR相关研究者带来帮助。根据我的经验,SVM监督分类是PolSARpro中监督分类效果比较好的一种,也是目前遥感图像分类中常用成熟、稳定的算法。这个分类PolSARpro V5.1.3版本也能做,但是两个版本都有点bug,都不完美。
两个版本的PolSARpro可以共存,像博主两个版本都在使用,推荐保留两个版本,因为两个版本都有一些bug,协同使用可以对比一下。
后面,博主打算介绍欧空局SNAP处理软件以及SNAP1
的Python模块------snappy处理,以促进该开源处理遥感处理平台的推广使用及开发。
博主创建了一个关于欧空局SNAP处理交流的QQ群:欧空局SNAP处理交流群:665903216(这个群已满人),欧空SNAP处理交流群(二):1102493346。欢迎感兴趣者加入,共同交流,共同进步!
数据源
本次使用的数据与我本人的第一篇博客数据是相同的,链接网址:https://blog.csdn.net/lidahuilidahui/article/details/86485372
你可以选用你自己的数据。
数据预处理
利用桌面的PolSARproV6.0快捷方式启动PolSARproV6.0:


点击Enter,再点击OK,进入模块选择界面:

点击Sentinel-1A/B mission(哨兵1A/1B卫星)模块(PolSARpro Bio模块也是可以的)点击Enter,即可进入以往的PolSARpro V5.1.3类似的界面(只是界面变成了灰色色调了而已,看到这个界面,竟想起许嵩的歌曲《灰色头像》):


数据读入、多视与地理编码
请参照我的第一篇博客(https://blog.csdn.net/lidahuilidahui/article/details/86485372 )完成数据读入、多视以及地理编码(含地理编码)操作,经过我的测试,如果感兴趣区(Region of Interest, ROI)提取操作早于地理编码前,后续将无法做地理编码,因为元数据文件metadata.xml文件(该文件含有控制点参数)会丢失。因此,感兴趣区的提取操作应在地理编码之后进行。这里选择的感兴趣区为上海市崇明区长兴岛和横沙岛,Swath带为IW2。在这个过程请保持耐心。地理编码成功后的界面如下(注意观察博主红色框标注部分):

叠加到Google Earth
上次这个操作没有演示,这次展示一下,以后你可以用于PPT展示(It’s your show time! Wonderful!)。
关闭GIMP弹出的两个图片,查看生成的文件夹目录:

其中,config_acquisition.txt和GEARTH_POLY.kml是叠加至Google Earth所必需的文件,丢失了这两个文件将无法叠加至Google Earth。提取感兴趣区操作这两个文件会丢失,因此,博主在感兴趣区的提取步骤前展示这个叠加效果。
进入C2文件夹,看到的文件应该是这样的:

(如果你的界面中Display等菜单图标没有点亮,请退出后重新设置目录环境后进入,这时Display等菜单图标会点亮。估计是有点bug的缘故。)
选择Display—>Create KML File:

input BMP File框中,选择:

input GEARTH_POLY File框中,选择:

(Reduction Factor:衰减因子,Transparency:透明度,保持默认设置即可)
点击Run,等待一下,见证奇迹的时刻到了:

可以看到PauliRGB.bmp叠加至Google Earth上面了,并且吻合得很好(这表明两者的坐标系是完全一致的)。惊不惊喜,意不意外!
感兴趣区的提取
关闭Google Earth,退出Dispaly工具栏,进入下一操作。
选择Tools—>Data Set Management—>ROI Extraction(注意该操作仅能选一个感兴趣区):

进入ROI Extraction 界面:

点击Graphic Editor,点击Yes,进入感兴趣区编辑界面:

选择PauliRGB.bmp作为勾选感兴趣区的图像,点击打开,进入如下界面:

在弹出的图像窗口中点击鼠标右键,显示编辑栏菜单,其中:
Select area,选择感兴趣区(可以是多边形);
Delete area,删除感兴趣区;
Save configuration,将所勾选的感兴趣区保存为.txt文件;
该编辑工具快捷键(注意该工具与以往的图像处理软件快捷键不一样,例如ENVI,ArcGIS等)如下:
平移:按住鼠标左键拖动
放大:鼠标滚轮往后滚动
缩小:鼠标滚轮往前滚动
点击Select area,选择感兴趣区:
移动鼠标在合适的位置,点击鼠标左键放下一个多边形端点(锚点),移动鼠标,到另一个端点处,点击放下一个多边形端点,反复操作几次,直至勾选出整个感兴趣区(如果你多边形端点勾选错了,并不能仅仅修改或删除该个端点,仅能通过删除整个多边形,重新勾选多边形来实现修改),如图:

那么如何结束感兴趣的绘制呢?
点击鼠标右键,选择Save configuration,结束绘制感兴趣区并保存下来。选择如果选择Select area和Delete area,则可以重新绘制感兴趣区。再强调一次,该操作仅能选择一个感兴趣区。
点击Run,点击Yes,创建感兴趣区文件:

成功时,会弹出一个掩膜文件和生成一个IW2_SNAP_ROI文件夹:

进入IW2_SNAP_ROI文件夹,可以看到仅有一个C2文件夹,上一个步骤的仍能看到的config_acquisition.txt和GEARTH_POLY.kml两个文件均已丢失,已不能再叠加至Google Earth 上。进入C2文件夹中可以看到如下文件:

极化滤波
将目录环境设置为IW2_SNAP_ROI:
 点击Save&Exit,保存目录环境设置。
点击Save&Exit,保存目录环境设置。
极化滤波操作,请参考我的第一篇博客(https://blog.csdn.net/lidahuilidahui/article/details/86485372 ),这里不再复述。
滤波界面:

特征提取
实际上H-A-α分解就是提取极化散射特征的过程,分解得到的参数可以看作是一个分类特征。
双极化SAR数据的H-A-α分解操作,请参考我的第一篇博客(https://blog.csdn.net/lidahuilidahui/article/details/86485372 ),这里不再复述。
双极化SAR数据H-A-α分解参数界面:

博主这里选择的是H(Entropy),A(Anisotropy),α(Alpha)三个特征(极化参数),你可以选择其它的特征,个数也可以多余3个或者少于3个,多少是你的自由,但是分类精度和运行速度会受到影响。
这两个步骤之后,进入IW2_SNAP_ROI_LEE的子目录C2文件夹,可以看到如下文件:

可以看到C2文件夹中没有RGB文件或者PauliRGB文件,下面利用C2矩阵文件创建一个RGB假彩色图像用于选择训练样本。

其中矩形框为生成的RGB文件名,我们将用这个RGB1.bmp(如下图所示)来选择训练样本。

关闭生成的RGB1.bmp文件,点Exit退出Display工具栏,进入下一个步骤:监督分类。
监督分类
好了,快结束了。还能保持耐心吗?接下来会介绍Wishart、SVM监督分类,这里不会详细介绍其原理,相关的文献有许多,具体请自己查找相关文献(因为双极化SAR监督分类目前仅支持这两种方法的监督分类,不信的话,你可以测试下)
Wishart监督分类
这是早期到现在极化SAR数据常用的监督分类,该分类是基于复Wishart分布的极大似然分类,但是该分布仅在均匀区域中的建模中效果比较好,也就是说,Wishart监督分类一般只能在均匀区域地物分类中取得较好的效果,对于其它不均匀区域地物分类,往往分类效果不好。对于不均匀区域的多极化通道SAR图像的建模,至今仍是一个热点和难点所在,近几年,提出的K、Go分布、W分布都有其局限性。对其进行精确的建模,对于SAR滤波、目标识别、分类都具有非常重要的意义,尤其是在军事上的目标识别(例如舰艇、坦克等)。
Wishart分类器
需要指出的是:该分类器针对的是C2矩阵元素(即C11,C12,C21,C22,也就是这四个元素是可以看作服从复Wishart分布的)进行的。
开始操作吧:
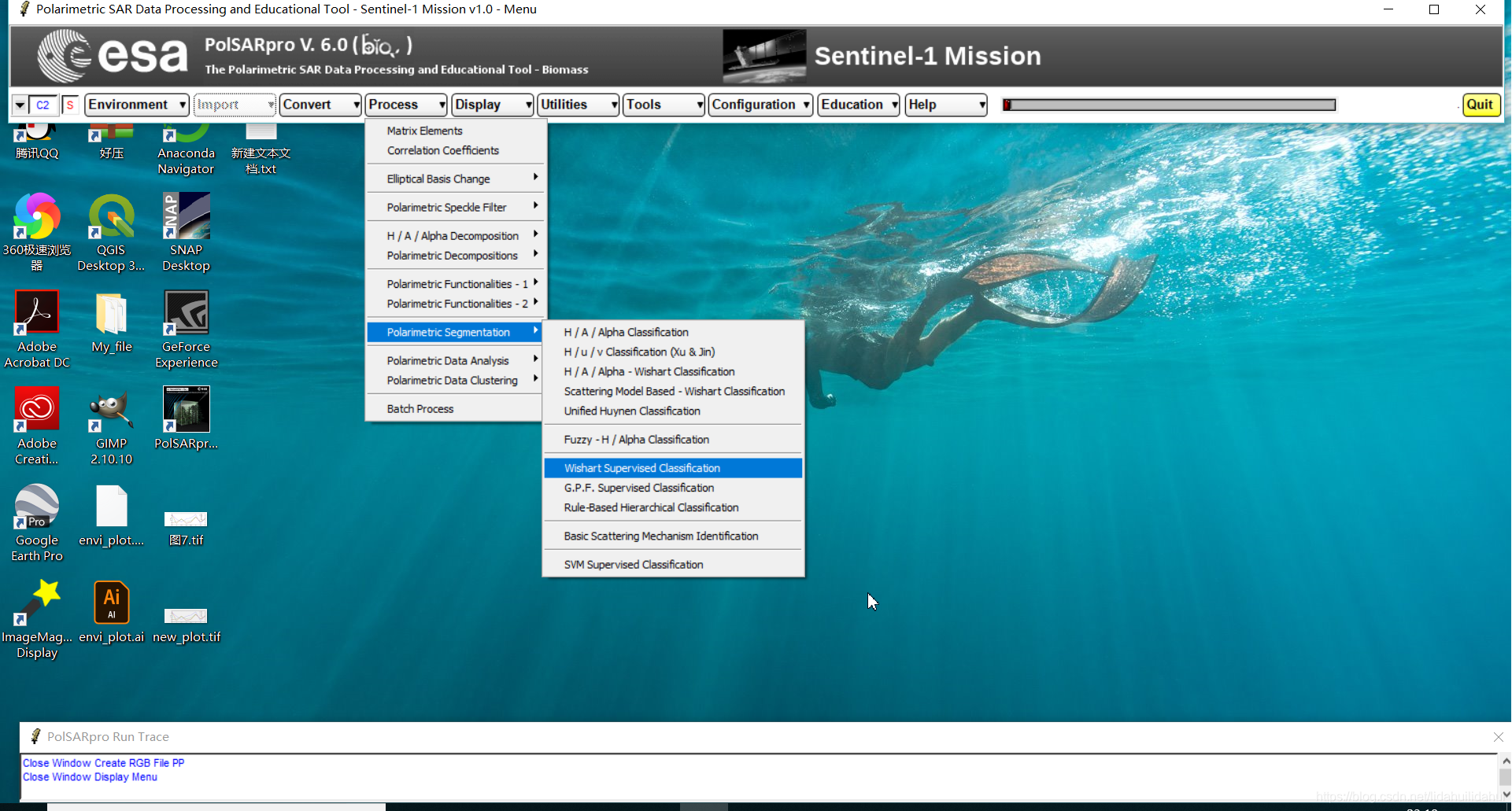
选择Process—>Polarmetric Segmentation—>Wishart Supervised Classification。
参数设置如下:

其中,Window Size大小为boxcar filter器窗口的大小,实际Wishart等监督分类时往往会加一个滤波操作,如果你不想再滤波,只需设置窗口大小为1×1;
Color Map16只是定义样本标注的颜色,并不是说要选16个类别。
你也可以勾选Reject Class(拒绝类),Reject Radio:5(默认值),实际上是一个距离度量。我也不太懂,具体你可以看下帮助文档。一般都不勾选,你也可以勾选和不勾选了对比一下结果。
创建训练样本
选择创建训练样本的图像,这里使用的是上一步创建的RGB1.bmp图像。
打开后,如下所示:

实际,在创建训练样本时,应该参考光学图像或者到地面实际调查测量。如果你想更精确地选择训练样本,你可以打开Google Earth 中查看相关信息。但是Google Earth 的影像不一定是最新的,最可靠的还是地面实际调查测量。
训练样本的创建:
在窗口中点击鼠标右键,会弹出一个菜单栏,其操作如下:
Add a new class:添加一个新类
Select area:选择一个样本区域
Delete area:删除一个样本区域
Save configuration:保存建立的样本区域,存储为.txt文件(勾选好全部样本点击这个选项,注意这个按键不是结束一个训练样本的绘制,而是直接结束了整个训练样本训练的程序)

该窗口工具与ROI Extract工具快捷键有点类似,但是有所不同,刚开始操作往往不习惯,需要慢慢适应(如下:
平移:按住鼠标左键拖动
放大:鼠标滚轮往后滚动
缩小:鼠标滚轮往前滚动
在窗口中鼠标右键,创建类别点击Add a new class(每次点击,Class Num都会加1,但是类别名(数字序号)无法编辑(例如改为字符串的形式“water”),因此,操作时你需要清楚你的选择的类别是什么):

这个时候,你会发现,点击鼠标坐标,仍然选择不了样本。继续,鼠标右键,点击Select Area,这时,你会发现终于可以选择样本了。

移动鼠标到某个位置,放大(缩小)图像,鼠标左键放下一个多边形端点(锚点),再移动鼠标到某个位置,鼠标左键放下一个多边形端点,反复操作若干次,直至勾选出该个样本区域。(如果你多边形端点勾选错了,并不能仅仅修改或删除该个端点,仅能通过删除整个多边形,重新勾选多边形来实现修改)绘制多边形边界示意图如下:

那么如何结束绘制一个样本的操作本?答案是:鼠标右键,选择Select Area

早期的版本中value和样本数一致的,很遗憾,这几个版本都没。
然后你会发现,多边形绘制的确结束了,然而却多了一个烦恼,有一个端点在旁边,导致你无法移动到别处选择样本区域。怎么办?鼠标右键,选择Delete Area。OK,你会发现该端点消失

博主这里选了4个类别:建筑、水体、裸土(含耕地)、植被(森林、草地、农作物等),每个类别勾选4-5个。(仅用于实验目的,就不要计较精度了)。
移动鼠标至合适位置,继续勾选样本区域(鼠标右键,点击Select Area)。(重复几次,取决于你这个类别的训练样本数量)直至勾选完第一个类别的所有训练样本。
鼠标右键,新建一个类别(Add a new class),创建新建类别的训练样本区域(Select area),勾选训练样本区域边界端点。反复勾选几次。(上述操作重复几次)
直到勾选完4个类别的全部训练样本。(红色:建筑;绿色:水体;紫色:裸土;黄色:植被)

窗口中右键,选择Save configuration,保存样本区域数据。会发现Run Training Process 图标被点亮。

训练样本
点击Run Training Process,训练样本,完成后如下图所示:
 会生成类别中心集(矩形框所示)
会生成类别中心集(矩形框所示)
分类
点击Run,执行分类。

会弹出3个文件,其中,wishart_training_cluster_set.bmp为训练样本分布图;wishart_supervised_classs_3x3.bmp为分类结果图(其中3x3为滤波窗口大小),wishart_supervised_classs_3x3_RGB1,是对原来的选择的RBG1.bmp进行分类的结果,用处不大。我们需要的wishart_supervised_classs_3x3.bmp。
精度评价
我们把这三个图像关掉,点击CM Editor,查看混淆矩阵。

可以看到混淆矩阵如下:

可以看到分类的精度还是比较高(主要是类别和训练样本太少,不过建筑和水体的分类精度和光学影像进行对比,精度还是可以的)。
点击文本框的Exit退出混淆矩阵窗口。
点击Exit退出Wishart监督分类窗口。
查看分类结果
回到文件夹IW2_SNAP_ROI_LEE/C2中查看分类结果文件:

注意博主标记的三个bmp文件,文件1是样本区域的分类图(相当从从分类结果中对样本区域进行ROI(感兴趣区)提取);文件2为对C2矩阵分类结果。文件3:创建的样本区域的分布图;
对这3幅图像进行联动操作,选择Display—>Display N BMP Files—>Open:

依次打开文件1,2,3(Open点击3次),结果如下图所示:

按住鼠标左键,移动至合适位置查看细节变化,鼠标滚轮控制放大缩小,可以看到三个图像有三个“十字丝”联动:

分类结果查看操作结束,关闭图像,点Exit退出,点Exit退出。(分类结果制图等还是需要ArcGIS、QGIS等来制作)。
SVM监督分类
很遗憾,PolSARpro V6.0的SVM监督分类有缺陷,具体你可以试下。博主这个SVM监督分类,使用PolSARpro V5.1.3版本来做的。
设置目录环境:

在分类之前,我们再做一个操作,将C2矩阵由线性单位转为分贝值,同时提取总功率Span分贝值用作分类特征(操作见下图):

点击Run运行即可。
其中,Modulus表示取模(即复数的振幅,线性单位);10log(Modulus)表示将模转化为分贝值;
Span表示总功率,其中
S
p
a
n
=
∣
S
1
∣
2
+
∣
S
2
∣
2
Span=|S_1|^2+|S_2|^2
Span=∣S1∣2+∣S2∣2,对于C2矩阵
S
p
a
n
=
∣
C
11
∣
+
∣
C
22
∣
Span=|C_{11}|+|C_{22}|
Span=∣C11∣+∣C22∣;
成功后,会弹出4个bmp图像窗口,分别是C11_db,C12_db, C22_db, span_db(db表示分贝值得意思),如图所示:

完成后关闭所有图像窗口,点击Exit,退出矩阵元素提取窗口。
SVM分类器
SVM(Support Vector Machine,支持向量机)算法具有小样本训练、支持高维特征空间的特点,可以很好地避免“维数灾难”和过学习问题。该算法成熟稳定,效果通常较好,目前在语音识别、自然语言处理、计算机视觉、遥感图像分类等多个领域仍在大量使用。
开始操作吧:
选择Process—>Polarmetric Segmentation—>SVM Supervised Classification。

进入页面:

可以看到图中GUI界面中有六个步骤,Step 1-Step 6,接下来完成这6步就可以。
创建训练样本
Step 1-Training Area(操作见下图):

博客这里选择是的上一步Wishart监督分类创建的感兴趣区域文件,你也可以选择Graphic Editor按钮打开RGB图像重新选择训练样本区域。为了和Wishart监督分类对比,博主使用了同样的样本区域。
训练样本
Step 2-Training Area:
保持默认即可。
Step 3-Color Maps(操作见下图):

SVM分类特征
Step 4-SVM Parameter Setting(操作见下图):

如果选择C2,仅有将C2的元素作为分类特征。楼主选择的是other,分类特征选择的是:
| 特征变量 | alpha | anisotropy | C11_db | C12_db | C22_db | entropy | span_db |
|---|---|---|---|---|---|---|---|
| 物理量 | 平均散射角α | 反熵A | C 11 C_{11} C11的模(分贝值) | C 12 C_{12} C12的模(分贝值) | C 22 C_{22} C22的模(分贝值) | 极化熵H | 总功率Span(分贝值) |
操作5,也可以不选,仅是一个类别概率图像。其它的参数可以自行选择。
SVM参数优化
Step 5-Kernel Parameter(操作如下图):

该步骤设置的是SVM核函数的类型(见矩形框所示):
RBF(Radial Basis Function, 径向基核函数,最常用的核函数),Polynomial(多项式核函数,其下的Degree设置的是多项式函数的阶数),Linear(线性核函数,即一次函数);(如果你对SVM算法很熟悉的话,应该一眼就能看明白)
操作1:RECOMMANDED(推荐参数)
(除非你SVM调参很厉害,否则建议你勾选这个选项)
操作2:点击Setup and Run,会弹出右边的小窗口;
操作3:点击Run RBF Kernel Paramete Optimisation:执行径向基核函数参数优化。这里使用的基于网格法对训练样本进行交叉验证(Cross Validation,CV)从而确定最优参数,主要确定参数C和G,其实C是前面的Cost(惩罚系数c),G是Gamma(核函数宽度g)。(其具体原理请查看相关文献)
执行后会弹出一个命令行窗口。
 矩形框可以查看进度(百分比,%)。
矩形框可以查看进度(百分比,%)。
完成后,右边小窗口可以看到找到的参数C和G的一个组合值。

点击Exit and Save CV Parameters,将会看到Cost和Gamma值发生了变化,正是寻优的结果值256,0.50000。

SVM分类
Step 6-Run Classification(执行分类):
执行后会弹出一个命令行窗口(接下来又是一个漫长的等待过程,请保持耐心),如下图所示:

矩形框显示的是SVM分类的进度(百分比,%)
事实上,PolSARpro的SVM分类算法很好,比ENVI等软件的SVM分类快得多,并且可以自动寻找参数优化值。(可以说是甩ENVI等几条街,也不过分!)
完成后会弹出一个bmp图像(但这不是分类结果,这是之前勾选的概率图像)。

可以把弹出的bmp图像关闭。
精度评价
很遗憾的是,这个版本的SVM分类仍然有点bug,看不到混淆矩阵。(据说早期版本是可以的,另外,Linux系统版本的bug会少很多,有条件的话可以装Linux系统版本的PolSARpro)。如果你点击 CM Editor,想查看混淆矩阵,很遗憾,找不到SVM的confusion_matrix.txt文件。所以,直接点Exit,退出SVM分类窗口就可以。
SVM分类结果
我们回到目录IW2_SNAP_ROI_LEE/C2,如图:
分类结果文件名为svm_classification_file:

请参考wishart监督分类的分类结果查看操作:

SVM与Wishart监督分类结果比较
我们依次打开下图所示的三个文件(文件1为SVM监督分类结果,文件2是SVM训练样本集,文件3是Wishart监督分类结果):

对比结果如下:

可以看到SVM分类更细碎些(斑点较多),总体上看两者的分类精度应该差距不大。(对比完可以退出所有的窗口了!)
后语
好了,终于结束了!(你看完此文和操作,花了很长时间,同样地,我写完此文也花了很长时间,但愿你能有所收获!)
请允许我牢骚多几句!关于PolSARpro软件的功能还有许多,很难详尽地介绍清楚,要想更好地使用和开发PolSARpro,需要对极化SAR的理论知识有较深的了解(学习还是很重要的!)。很遗憾这里使用的是欧空局的Sentinel-1双极化SAR数据(使用这个数据的主要原因是这个数据可以免费下载),不是全极化SAR数据,大量的实验表明,全极化SAR数据的分类精度高于双极化SAR数据、单极化数据(当然,博客的方法对于全极化SAR数据也是使用)。
事实上,全极化SAR数据可以做更多的操作,无论是极化分解、分类、极化干涉测量等都有更多应用。其实,博主更希望的使用国产数据来做些实验的,然而,由于种种原因(数据不开放,国产数据质量、兼容性等),国产卫星数据的利用率远远低于国外卫星数据的利用率,不禁使人感到担忧,没有使用,很难有反馈,也就很难有改进。
目前而言,国产卫星数据相比国外卫星数据(欧空局、美国、日本等),仍有很大的差距!不管怎样,还是希望各位有条件的话,还是多多使用国产卫星数据。无论好坏,用自己国家的数据,多少更放心些。博主后面也打算也打算分享一下国产卫星数据的应用,各位如果有时间的话,也可以写点国产卫星数据的应用的文章,促进国产卫星数据的推广使用。
如果博客内容有错的话,请在评论区批评指正!谢谢!
再打一次广告,博主创建的欧空局SNAP处理交流群:665903216(这个群已满人),欧空SNAP处理交流群(二):1102493346。欢迎感兴趣者加入,共同交流与进步!
参考文献
[1] (美)李仲森(Lee,J.),(法)鲍狄埃(Pottier,E.),洪文等. 极化雷达成像基础与应用[M]. 北京:电子工业出版社, 2013.06
[2] 尤淑撑,行敏锋,何彬彬等. 极化SAR土地资源调查监测技术与应用[M]. 北京:科学出版社,2018.07
[3] 刘涛,崔浩贵,谢凯等. 极化合成孔径雷达图像解译技术[M]. 北京:国防工业出版社,2017.12
[4] 马建文等.遥感数据智能处理方法与程序设计 (第二版)[M]. 北京:科学出版社,2010.01
[5]微信公众号:遥感事. 推送文章:Dragon系列-PolSARpro之SVM监督分类(https://mp.weixin.qq.com/s?__biz=MzI0MDQ2NTU2Ng==&mid=2247483736&idx=1&sn=2abef8d7b789b80ce851bd24f42071cf&chksm=e91b22a9de6cabbf8772db08e0d6aa82e8fc4ce7f8ff705134c709e9ac9fe5247030d090d44c&mpshare=1&scene=23&srcid=#rd)
SNAP(Sentinel Application Platform)是欧空局为处理Sentinel卫星数据而开发的一个开源处理平台,功能强大,对欧空局相关卫星、美国、日本卫星等数据有很好的处理效果。 ↩︎

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 33
33 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)