深入探索南京沁恒WCH BLE蓝牙芯片的TMOS:个人学习之旅
近期我们的产品中用到了南京沁恒推出的低功耗蓝牙芯片CH582。这款芯片与常见的STM32的ARM Cortex-M处理器架构存在显著差异,而是采用了新兴的指令集架构----RISC-V。其中,CH582的TMOS任务管理系统给我留下了深刻的印象。尽管它与传统的操作系统有一些相似之处,但又有其独特之处。TMOS任务管理系统是CH582的一大亮点。它类似于操作系统的概念,能够实现任务的调度、内存管理等
文章目录
一、前言
近期我们的产品中用到了南京沁恒推出的低功耗蓝牙芯片CH582。这款芯片与常见的STM32的ARM Cortex-M处理器架构存在显著差异,而是采用了新兴的指令集架构----RISC-V。其中,CH582的TMOS任务管理系统给我留下了深刻的印象。尽管它与传统的操作系统有一些相似之处,但又有其独特之处。
TMOS任务管理系统是CH582的一大亮点。它类似于操作系统的概念,能够实现任务的调度、内存管理等功能。然而,与常见的操作系统相比,TMOS更加轻量级,旨在满足低功耗、实时响应和高能效的需求。这种设计使得CH582在处理任务时具有出色的性能和效率,同时保持了较低的功耗。
二、TMOS是什么
1.介绍
蓝牙要与多个设备连接并实现多功能和多任务,这就会导致了调度问题。尽管软件和协议栈可以扩展,但最底层的执行单元只有一个。为了处理多事件和多任务切换,需要将事件和任务对应起来。为此,TMOS被引入作为一个操作系统抽象层。
TMOS是调度的核心,BLE协议栈、profile定义和所有应用都围绕它实现。TMOS不同于传统的操作系统,它是一个允许软件建立和执行事件的循环。
举例来说,TMOS是通过时间片轮询的方式实现多任务调度运行,实际上每次只有一个任务运行。系统时钟来源于芯片RTC,单位为625us。用户通过注册任务(Task)将自定义的事件(Event)添加到TMOS的任务链表中,由TMOS进行调度运行。Event事件标志位,为1则运行,为0则不运行。
2.工作机制
- 任务注册:用户可以通过注册任务将自定义的事件添加到TMOS的任务链表中。每个任务在注册后分配一个唯一的ID。每个任务最多包含16个事件,其中包括一个消息事件和15个自定义事件。事件采用BitMap的方式定义事件标志,如0x0001、0x0002、0x0004等。
- 任务调度:TMOS循环查询任务链表,根据任务ID确定优先级,优先级越低,任务越先运行。每个任务运行完一个事件后,通过异或的方式清除已运行的事件,同时返回未运行的事件标志,然后运行下一个任务。当任务调度系统运行一遍后,再次回到任务链表头的一个事件,如此循环下去。
- 时间片轮询:TMOS通过时间片轮询的方式实现多任务调度运行。系统时钟单位为625us,以RTC为基准得到所有需要系统的时间。每个任务占用一定的时间(独占式,执行完当前任务退出,继续查询其他可执行任务),所有的任务通过时间分片的方式处理。
综上所述,TMOS通过任务注册、任务调度和时间片轮询的方式实现多任务的调度和管理。这种机制可以有效地实现多事件和多任务的切换,提高系统的效率和响应速度。
三、使用步骤
1.MounRiver Studio
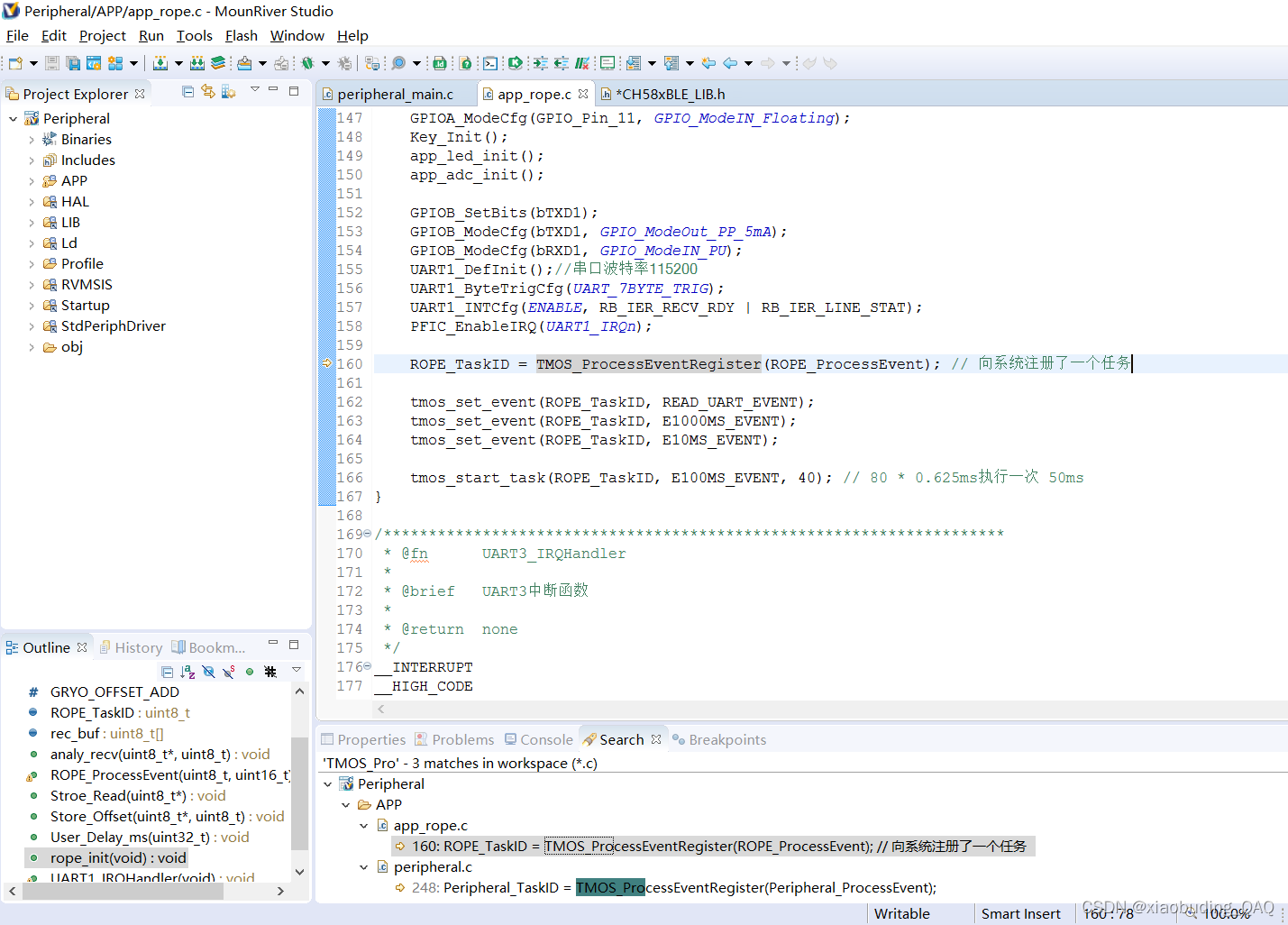
这是一款面向RISC-V,ARM等内核MCU集成开发环境,界面如下,感兴趣的可以自行下载。

2.注册任务ID
ID定义是全局变量。
代码如下(示例):
uint8_t ROPE_TaskID = INVALID_TASK_ID; // Task ID for internal task/event processing
ROPE_TaskID = TMOS_ProcessEventRegister(ROPE_ProcessEvent); // 向系统注册了一个任务
/**
* @brief register process event callback function//注册处理事件回调函数
*
* @param eventCb-events callback function//事件回调函数
*
* @return 0xFF - error,others-task id//错误,其他-任务id
*/
extern tmosTaskID TMOS_ProcessEventRegister( pTaskEventHandlerFn eventCb );
3.任务初始化
编写任务初始化进程,并需要添加到TMOS初始化进程中,这就是说系统启动后不能动态添加功能(新的Task ID);
代码如下(示例):
CH58X_BLEInit();
HAL_Init();
ReadImageFlag();
rope_init();//用户定义初始化
GAPRole_PeripheralInit();
Peripheral_Init();
4.编写任务处理程序

代码如下(示例):
/*********************************************************************
* @fn Peripheral_ProcessEvent
*
* @brief Peripheral Application Task event processor. This function
* is called to process all events for the task. Events
* include timers, messages and any other user defined events.
*
* @param task_id - The TMOS assigned task ID. TMOS分配的任务ID
* @param events - events to process. This is a bit map and can
* contain more than one event.
*
* @return events not processed
*/
uint16_t ROPE_ProcessEvent(uint8_t task_id, uint16_t events)
{
if (events & SYS_EVENT_MSG)
{
uint8_t *pMsg;
if ((pMsg = tmos_msg_receive(ROPE_TaskID)) != NULL)
{
tmos_msg_deallocate(pMsg);
}
return (events ^ SYS_EVENT_MSG);
}
........省略
}
5.定义任务事件
事件名按位定义,每一层taskID最多包含1个消息事件和15个任务事件(共16位)
代码如下(示例):
#define READ_BAT_EVENT 1
#define READ_UART_EVENT 2
#define E1000MS_EVENT 4
#define E100MS_EVENT 8
#define E10MS_EVENT 16
#define SLEEP_EVENT 20
6.启动任务
6.1 立即启动
代码如下(示例):
/**
* @brief start a event immediately
*
* @param taskID - task ID of event
* @param event - event value
*
* @return 0 - SUCCESS.
*/
extern bStatus_t tmos_set_event( tmosTaskID taskID, tmosEvents event );//立即启动事件
tmos_set_event(ROPE_TaskID, READ_UART_EVENT);//立刻执行
6.2 延迟启动
代码如下(示例):
/**
* @brief start a event after period of time
*
* @param taskID - task ID to set event for
* @param event - event to be notified with
* @param time - timeout value
*
* @return TRUE,FALSE.
*/
extern BOOL tmos_start_task( tmosTaskID taskID, tmosEvents event, tmosTimer time );//在一段时间后开始一个事件
tmos_start_task(ROPE_TaskID, E100MS_EVENT, 80); //80 * 0.625ms后执行一次 50ms
7.任务循环
时基函数循环
while (1)
{
if (stSysTime.flg._10ms + TEN_MILLISECOND < Time_millis()) //10ms
{
stSysTime.flg._10ms = Time_millis();
//用户代码
}
if (stSysTime.flg._50ms + FIFTY_MILLISECOND < Time_millis()) //50ms
{
stSysTime.flg._50ms = Time_millis();
//用户代码
}
if (stSysTime.flg._100ms + BEST_MILLISECOND < Time_millis()) //100ms
{
stSysTime.flg._100ms = Time_millis();
//用户代码
}
if (stSysTime.flg._1s + THOUSAND_MILLISECOND < Time_millis()) //1s
{
stSysTime.flg._1s = Time_millis();
//用户代码
}
}
其实这个任务循环写法和我们写时基函数循环执行有点相似。
uint16_t ROPE_ProcessEvent(uint8_t task_id, uint16_t events)
{
if(events & ID事件1)
{
//用户代码
tmos_start_task(ID, ID事件1, 执行时间1);
return (events ^ ID事件1);
}
if(events & ID事件2)
{
//用户代码
tmos_start_task(ID, ID事件2, 执行时间2);
return (events ^ ID事件2);
}
if(events & ID事件3)
{
//用户代码
tmos_start_task(ID, ID事件3, 执行时间3);
return (events ^ ID事件3);
}
if(events & ID事件4)
{
//用户代码
tmos_start_task(ID, ID事件4, 执行时间4);
return (events ^ ID事件4);
}
}
具体代码如下(示例):
/*********************************************************************
@fn ROPE_ProcessEvent
@brief Peripheral Application Task event processor. This function
is called to process all events for the task. Events
include timers, messages and any other user defined events.
@param task_id - The TMOS assigned task ID. TMOS分配的任务ID
@param events - events to process. This is a bit map and can
contain more than one event.
@return events not processed
*/
uint16_t ROPE_ProcessEvent(uint8_t task_id, uint16_t events)
{
if (events & SYS_EVENT_MSG)
{
uint8_t *pMsg;
if ((pMsg = tmos_msg_receive(ROPE_TaskID)) != NULL)
{
tmos_msg_deallocate(pMsg);
}
return (events ^ SYS_EVENT_MSG);
}
if (events & READ_UART_EVENT)
{
if (rope.u8UartFlg == rope.u8RxNum && rope.u8RxNum)
{
analy_recv(rope.u8RxBuf, rope.u8RxNum);
memset(rope.u8RxBuf, 0, 100);
rope.u8RxNum = 0;
}
else
{
rope.u8UartFlg = rope.u8RxNum;
}
tmos_start_task(ROPE_TaskID, READ_UART_EVENT, 8); // 8 * 0.625ms执行一次 2.5MS
return (events ^ READ_UART_EVENT);
}
if (events & E1000MS_EVENT)
{
tmos_start_task(ROPE_TaskID, E1000MS_EVENT, 1600); // 1600 * 0.625ms执行一次 1000MS
off_power_task();
return (events ^ E1000MS_EVENT);
}
if (events & E100MS_EVENT)
{
tmos_start_task(ROPE_TaskID, E100MS_EVENT, 40); // 40 * 0.625ms执行一次 25MS
if(IO_KEY_POWER.read() == 1)
{
app_bat_gather();
app_led_display();
app_adc_action();
}
return (events ^ E100MS_EVENT);
}
if (events & E10MS_EVENT)
{
tmos_start_task(ROPE_TaskID, E10MS_EVENT, 16); // 16 * 0.625ms执行一次 10MS
key_scan();
return (events ^ E10MS_EVENT);
}
}
主循环不停调用TMOS_SystemProcess,查询可执行event事件;如果开始HAL_SLEEP,芯片开启低功耗睡眠模式,Tmos会开启RTC唤醒功能,事件被执行前会自动唤醒,运行事件代码。
/*********************************************************************
@fn Main_Circulation
@brief 主循环
@return none
*/
__HIGH_CODE
__attribute__((noinline))
void Main_Circulation()
{
while(1)
{
TMOS_SystemProcess();
}
}
8.注意事项
- 禁止在中断中调用
- 建议不要在单个任务中执行超过连接间隔一半时长的任务,否则将影响蓝牙通讯
- 同理,在中断中建议不要执行超过连接间隔一半时长的任务,否则将影响蓝牙通讯
- 在事件生效执行的代码中调用延时执行函数时,延时时间以当前事件生效时间点为基准偏移,所以对调用延时执行函数在生效执行的代码中摆放的位置没有要求。
- 任务存在优先级,根据在xxx_ProcessEvent函数中判断的先后顺序决定,同时生效的任务,先执行先判断,后执行后判断。注意,执行完先判断的事件任务后,要等到任务调度系统轮巡一遍后,才会执行后判断的事件任务。
- 事件名按位定义,每一层taskID最多包含1个消息事件和15个任务事件(共16位)
四、总结
以上就是我对南京沁恒WCH TMOS的个人学习总结,本人能力有限,如有错误,还请见谅指出。
感谢你的观看,谢谢!


开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 35
35 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)