RRT算法学习及MATLAB演示
RRT(Rapid Random Tree)算法,即快速随机树算法,是LaValle在1998年首次提出的一种高效的路径规划算法。RRT算法以初始的一个根节点,通过随机采样的方法在空间搜索,然后添加一个又一个的叶节点来不断扩展随机树。当目标点进入随机树里面后,随机树扩展立即停止,此时能找到一条从起始点到目标点的路径。
文章目录
1 前言
RRT(Rapid Random Tree)算法,即快速随机树算法,是LaValle在1998年首次提出的一种高效的路径规划算法。RRT算法以初始的一个根节点,通过随机采样的方法在空间搜索,然后添加一个又一个的叶节点来不断扩展随机树。当目标点进入随机树里面后,随机树扩展立即停止,此时能找到一条从起始点到目标点的路径。
两个代码文件见最后一节。
2 算法简介
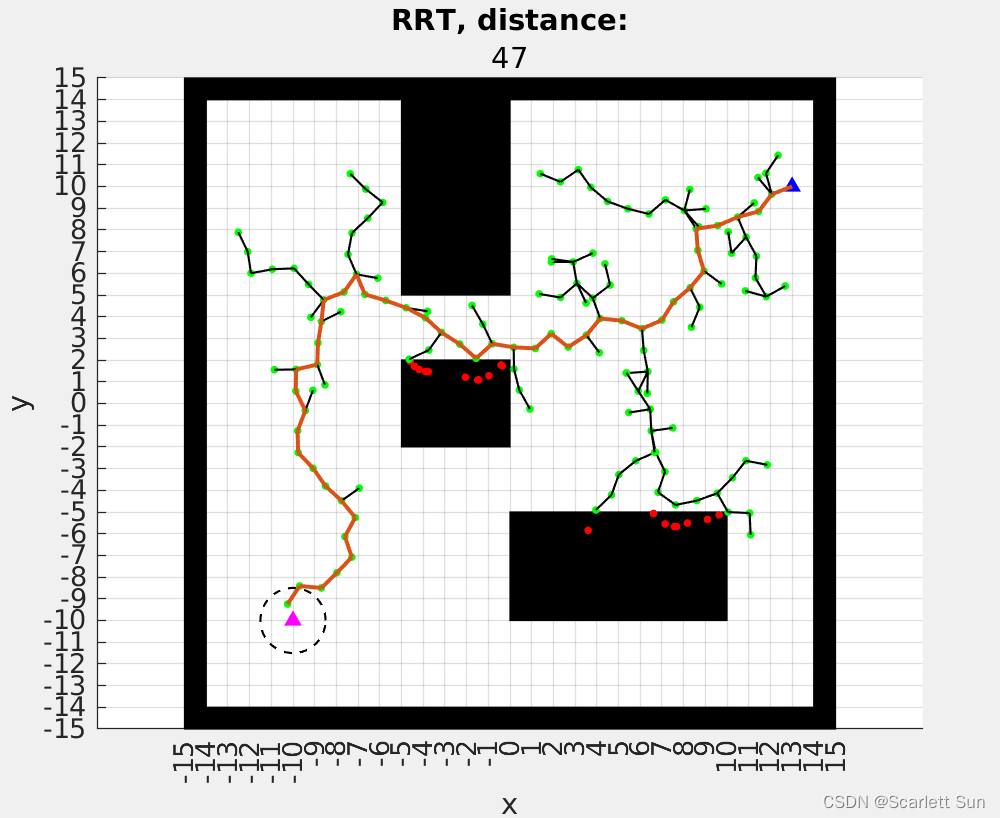
效果预览图

算法的计算过程如下:
step1:初始化随机树。将环境中起点作为随机树搜索的起点,此时树中只包含一个节点即根节点;
stpe2:在环境中随机采样。在环境中随机产生一个点,若该点不在障碍物范围内则计算随机树中所有节点到的欧式距离,并找到距离最近的节点,若在障碍物范围内则重新生成并重复该过程直至找到;
stpe3:生成新节点。在和连线方向,由指向固定生长距离生成一个新的节点,并判断该节点是否在障碍物范围内,若不在障碍物范围内则将添加到随机树 中,否则的话返回step2重新对环境进行随机采样;
step4:停止搜索。当和目标点之间的距离小于设定的阈值时,则代表随机树已经到达了目标点,将作为最后一个路径节点加入到随机树中,算法结束并得到所规划的路径 。
3 MATLAB实现
3.1 定义地图
地图是模拟的栅格地图,resolution表示每个格子的长度,这里设置为1,地图范围为
x
∈
[
−
15
,
15
]
x\in[-15,15]
x∈[−15,15],
y
∈
[
−
15
,
15
]
y\in[-15,15]
y∈[−15,15]。障碍物的形状为矩形,定义方式为矩形的左下角坐标及其水平长度和竖直长度。wall_obstacle位于地图边界,block_obstacle位于地图内部。
%% Define the map
resolution = 1; % resolution, cell length
% Map boundaries
left_bound = -15;
right_bound = 15;
lower_bound = -15;
upper_bound = 15;
% Wall obstacle [left_down_x,left_down_y,horizontal_length,vertical_length]
wall_obstacle(1,:) = [ left_bound, lower_bound, 1, upper_bound-lower_bound-1]; % left boundary
wall_obstacle(2,:) = [ left_bound+1, lower_bound, right_bound-left_bound-1, 1]; % bottom boundary
wall_obstacle(3,:) = [right_bound-1, lower_bound+1, 1, upper_bound-lower_bound-1]; % right boundary
wall_obstacle(4,:) = [ left_bound, upper_bound-1, right_bound-left_bound-1, 1]; % up boundary
% Blcok obstacle [left_down_x,left_down_y,horizontal_length,vertical_length]
block_obstacle(1,:) = [0,-10,10,5]; % block obstacle 1
block_obstacle(2,:) = [-5,5,5,9]; % block obstacle 2
block_obstacle(3,:) = [-5,-2,5,4]; % block obstacle 3
ob = [block_obstacle; wall_obstacle];
3.2 绘制地图
%% Draw the map
figure(1); % create a figure
% Figure setting
set(gca,'XLim',[left_bound right_bound]); % x axis range
set(gca,'XTick',[left_bound:resolution:right_bound]); % x axis tick
set(gca,'YLim',[lower_bound upper_bound]); % y axis range
set(gca,'YTick',[lower_bound:resolution:upper_bound]); % y axis tick
grid on
axis equal
title('RRT');
xlabel('x');
ylabel('y');
hold on
% Draw the obstacles
for i=1:1:size(ob,1)
fill([ob(i,1),ob(i,1)+ob(i,3),ob(i,1)+ob(i,3),ob(i,1)],...
[ob(i,2),ob(i,2),ob(i,2)+ob(i,4),ob(i,2)+ob(i,4)],'k');
end
结果如下图所示,这里用红框标出了wall_obstacle,用绿色数字表示block_obstacle。

3.3 定义参数
grow_distance指新生长出的节点与其父节点的距离,这里设为1;goal_distance指的是如果新生长出的节点落在这个范围里,则认为已经到达终点;goal的位置设为 [ − 10 , − 10 ] [-10,-10] [−10,−10],start的位置设为 [ 13 , 10 ] [13,10] [13,10]。
%% Initialize parameters
grow_distance = 1; % distance between parent node and the derived child node
goal_radius = 1.5; % can be considered as reaching the goal once within this range
% Goal point position
goal.x = -10;
goal.y = -10;
% Start point position
start.x = 13;
start.y = 10;
3.4 绘制起点和终点
%% Draw the start point and the end point
h_start = plot(start.x,start.y,'b^','MarkerFaceColor','b','MarkerSize',5*resolution);
h_goal = plot(goal.x,goal.y,'m^','MarkerFaceColor','m','MarkerSize',5*resolution);
% Draw the goal circle
theta = linspace(0,2*pi);
goal_circle.x = goal_radius*cos(theta) + goal.x;
goal_circle.y = goal_radius*sin(theta) + goal.y;
plot(goal_circle.x,goal_circle.y,'--k','LineWidth',0.8*resolution);

3.5 RRT算法
这一部分主要是用于演示RRT算法是怎么建树,怎么到达给定终点,侧重于展示RRT的思想,如果用于工程实现,则需要用C++等高级语言重写,并且使用严谨的数据结构。
3.5.1 代码
注意需要另外写一个函数find_closet_node.m
function [angle,min_idx] = find_closet_node(rd_x,rd_y,tree)
distance = [];
i = 1;
while i <= length(tree.child) % should not use size() function
dx = rd_x - tree.child(i).x;
dy = rd_y - tree.child(i).y;
distance(i) = sqrt(dx^2 + dy^2);
i = i+1;
end
[~,min_idx] = min(distance);
angle = atan2(rd_y-tree.child(min_idx).y, rd_x-tree.child(min_idx).x);
end
下面的代码承接3.4节即可
%% RRT Algorithm
% Initialize the random tree(in the form of struct)
tree.child = []; % current node
tree.parent = []; % current node's parent
tree.distance = []; % current node's distance to the start
tree.child = start;
tree.parent = start;
tree.distance = 0;
new_node.x = start.x;
new_node.y = start.y;
goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2);
% Main loop
while goal_distance > goal_radius
random_point.x = (right_bound - left_bound) * rand() + left_bound; % random x value between x limit
random_point.y = (upper_bound - lower_bound) * rand() + lower_bound; % random y value between y limit
handle_1 = plot(random_point.x,random_point.y,'p','MarkerEdgeColor',[0.9290 0.6940 0.1250],'MarkerFaceColor',[0.9290 0.6940 0.1250],'MarkerSize',8*resolution); % draw the randomly generated point
[angle,min_idx] = find_closet_node(random_point.x,random_point.y,tree);
% pause(0.5)
handle_2 = plot([tree.child(min_idx).x,random_point.x],[tree.child(min_idx).y,random_point.y],'-','Color',[0.7 0.7 0.7],'LineWidth',0.8*resolution); % draw the segment between the closest tree node and the randomly generated point
% pause(0.5)
new_node.x = tree.child(min_idx).x + grow_distance*cos(angle);
new_node.y = tree.child(min_idx).y + grow_distance*sin(angle);
handle_3 = plot(new_node.x,new_node.y,'.r','MarkerFaceColor','r','MarkerSize',10*resolution); % draw the potential new node
flag = 1; % default: valid node
% Judge if the new node is inside the obstacle
step = 0.01;
if new_node.x < tree.child(min_idx).x
step = -step;
end
for k=1:1:size(ob,1)
for i=tree.child(min_idx).x:step:new_node.x
if angle>pi/2-5e-02 && angle<pi/2+5e-02
j = tree.child(min_idx).y+1;
elseif angle>-pi/2-5e-02 && angle<-pi/2+5e-02
j = tree.child(min_idx).y-1;
else
j=tree.child(min_idx).y+(i-tree.child(min_idx).x)*tan(angle);
end
if i>=ob(k,1) && i<=(ob(k,1)+ob(k,3))
if j >=ob(k,2) && j<=ob(k,2)+ob(k,4)
flag = 0; % invalid node
break
end
end
end
if flag==0
break
end
end
% pause(0.5)
if flag==1
tree.child(end+1) = new_node;
tree.parent(end+1) = tree.child(min_idx);
tree.distance(end+1) = 1 + tree.distance(min_idx);
goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2);
delete(handle_3)
plot(new_node.x,new_node.y,'.g','MarkerFaceColor','g','MarkerSize',10*resolution); % draw the new node
% pause(0.2)
plot([tree.child(min_idx).x,new_node.x],[tree.child(min_idx).y,new_node.y],'-k','LineWidth',0.8*resolution); % draw the segment between the closest tree node and the new node
end
% pause(0.5)
delete(handle_1);
delete(handle_2);
% pause(0.5)
end
3.5.2 效果

3.5.3 代码解读
-
首先是初始化一个
tree结构体,含有child, parent, distance三个成员,三者均为列表。child用于存储所有节点,在相同索引位置,parent存储child的父节点,distance存储child到起点的距离(沿着树的距离,不是直线距离)。然后对这三个成员进行初始化。% Initialize the random tree(in the form of struct) tree.child = []; % current node tree.parent = []; % current node's parent tree.distance = []; % current node's distance to the start tree.child = start; tree.parent = start; tree.distance = 0; -
定义全局变量,new_node,用于存储新衍生出来的节点,用起点对其初始化。
定义全局变量,goal_distance,用于存储new_node到终点的距离。new_node.x = start.x; new_node.y = start.y; goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2); -
进入主循环,只要new_node尚未到达终点范围,则循环继续。
-
每个循环中,在地图范围内生成一个随机点,然后找到距离该随机点最近的树上的节点(借助自定义函数
find_closet_node实现),返回该点的索引,以及这两点连线的角度。【生成的随机点用黄色五角星表示】【随机点与最近的树上节点的连线用灰色表示】random_point.x = (right_bound - left_bound) * rand() + left_bound; % random x value between x limit random_point.y = (upper_bound - lower_bound) * rand() + lower_bound; % random y value between y limit handle_1 = plot(random_point.x,random_point.y,'p','MarkerEdgeColor',[0.9290 0.6940 0.1250],'MarkerFaceColor',[0.9290 0.6940 0.1250],'MarkerSize',8*resolution); % draw the randomly generated point [angle,min_idx] = find_closet_node(random_point.x,random_point.y,tree); % pause(0.5) handle_2 = plot([tree.child(min_idx).x,random_point.x], [tree.child(min_idx).y,random_point.y],'-','Color',[0.7 0.7 0.7],'LineWidth',0.8*resolution); % draw the segment between the closest tree node and the randomly generated pointfunction [angle,min_idx] = find_closet_node(rd_x,rd_y,tree) distance = []; i = 1; while i <= length(tree.child) % should not use size() function dx = rd_x - tree.child(i).x; dy = rd_y - tree.child(i).y; distance(i) = sqrt(dx^2 + dy^2); i = i+1; end [~,min_idx] = min(distance); angle = atan2(rd_y-tree.child(min_idx).y, rd_x-tree.child(min_idx).x); end -
在这两点连线上,生成一个新节点,新节点与树上的节点距离为1,默认该节点是有效的,也即不会与障碍物干涉的。【新节点用红色实心点表示】
% pause(0.5) new_node.x = tree.child(min_idx).x + grow_distance*cos(angle); new_node.y = tree.child(min_idx).y + grow_distance*sin(angle); handle_3 = plot(new_node.x,new_node.y,'.r','MarkerFaceColor','r','MarkerSize',10*resolution); % draw the potential new node flag = 1; % default: valid node -
然后判断生成的新节点与树上节点的连线上的点是否位于障碍物内,也即判断新节点是否会导致路径与障碍物干涉,如果发生干涉,则把flag设置为0。
% Judge if the new node is inside the obstacle step = 0.01; if new_node.x < tree.child(min_idx).x step = -step; end for k=1:1:size(ob,1) for i=tree.child(min_idx).x:step:new_node.x if angle>pi/2-5e-02 && angle<pi/2+5e-02 j = tree.child(min_idx).y+1; elseif angle>-pi/2-5e-02 && angle<-pi/2+5e-02 j = tree.child(min_idx).y-1; else j=tree.child(min_idx).y+(i-tree.child(min_idx).x)*tan(angle); end if i>=ob(k,1) && i<=(ob(k,1)+ob(k,3)) if j >=ob(k,2) && j<=ob(k,2)+ob(k,4) flag = 0; % invalid node break end end end if flag==0 break end end -
如果没有发生干涉,则将该点加入child列表,并将上一个点加入parent列表,该点距离起点的距离等于grow_distance加上上一个点距离起点的距离。【如果新节点在可行区域,则将该节点画为绿色】【该可行新节点与上一个节点的连线为黑色】【擦除之前生成的五角星随机点】【擦除之前五角星随机点与树上节点的连线】
% pause(0.5) if flag==1 tree.child(end+1) = new_node; tree.parent(end+1) = tree.child(min_idx); tree.distance(end+1) = grow_distance + tree.distance(min_idx); goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2); delete(handle_3) plot(new_node.x,new_node.y,'.g','MarkerFaceColor','g','MarkerSize',10*resolution); % draw the new node % pause(0.2) plot([tree.child(min_idx).x,new_node.x],[tree.child(min_idx).y,new_node.y],'-k','LineWidth',0.8*resolution); % draw the segment between the closest tree node and the new node end % pause(0.5) delete(handle_1); delete(handle_2); % pause(0.5)
-
4 参考
RRT, RRT* & Random Trees
全局路径规划 - RRT算法原理及实现
5 完整代码
将下面两个文件放在同一文件夹下,运行(或分节运行)RRT_learn.m即可。此外,需要动态观察算法效果则把所有pause语句取消注释。
find_closest_node.m
function [angle,min_idx] = find_closest_node(rd_x,rd_y,tree)
distance = [];
i = 1;
while i <= length(tree.child) % should not use size() function
dx = rd_x - tree.child(i).x;
dy = rd_y - tree.child(i).y;
distance(i) = sqrt(dx^2 + dy^2);
i = i+1;
end
[~,min_idx] = min(distance);
angle = atan2(rd_y-tree.child(min_idx).y, rd_x-tree.child(min_idx).x);
end
RRT_learn.m
%%
clear all
clc
%% Notification
% 1,用户自定义的内容:地图范围,障碍物数量和大小,起点和终点的位置,终点范围的阈值,RRT树生长一次的长度,和绘图相关的设置
% 2,需要演示算法效果的时候,把所有pause取消注释;不需要演示算法效果的时候,把所有pause加上注释
%% Define the map
resolution = 1; % resolution, cell length
left_bound = -15;
right_bound = 15;
lower_bound = -15;
upper_bound = 15;
% Wall obstacle [left_down_x,left_down_y,horizontal_length,vertical_length]
wall_obstacle(1,:) = [ left_bound, lower_bound, 1, upper_bound-lower_bound-1]; % left boundary
wall_obstacle(2,:) = [ left_bound+1, lower_bound, right_bound-left_bound-1, 1]; % bottom boundary
wall_obstacle(3,:) = [right_bound-1, lower_bound+1, 1, upper_bound-lower_bound-1]; % right boundary
wall_obstacle(4,:) = [ left_bound, upper_bound-1, right_bound-left_bound-1, 1]; % up boundary
% Blcok obstacle [left_down_x,left_down_y,horizontal_length,vertical_length]
block_obstacle(1,:) = [0,-10,10,5]; % block obstacle 1
block_obstacle(2,:) = [-5,5,5,9]; % block obstacle 2
block_obstacle(3,:) = [-5,-2,5,4]; % block obstacle 3
ob = [block_obstacle; wall_obstacle];
%% Draw the map
figure(1); % create a figure
% Figure setting
set(gca,'XLim',[left_bound right_bound]); % x axis range
set(gca,'XTick',[left_bound:resolution:right_bound]); % x axis tick
set(gca,'YLim',[lower_bound upper_bound]); % y axis range
set(gca,'YTick',[lower_bound:resolution:upper_bound]); % y axis tick
grid on
axis equal
title('RRT');
xlabel('x');
ylabel('y');
hold on
% Draw the obstacles
for i=1:1:size(ob,1)
fill([ob(i,1),ob(i,1)+ob(i,3),ob(i,1)+ob(i,3),ob(i,1)],...
[ob(i,2),ob(i,2),ob(i,2)+ob(i,4),ob(i,2)+ob(i,4)],'k');
end
%% Initialize parameters
grow_distance = 1; % distance between parent node and the derived child node
goal_radius = 1.5; % can be considered as reaching the goal once within this range
% Goal point position
goal.x = -10;
goal.y = -10;
% Start point position
start.x = 13;
start.y = 10;
%% Draw the start point and the end point
h_start = plot(start.x,start.y,'b^','MarkerFaceColor','b','MarkerSize',5*resolution);
h_goal = plot(goal.x,goal.y,'m^','MarkerFaceColor','m','MarkerSize',5*resolution);
% Draw the goal circle
theta = linspace(0,2*pi);
goal_circle.x = goal_radius*cos(theta) + goal.x;
goal_circle.y = goal_radius*sin(theta) + goal.y;
plot(goal_circle.x,goal_circle.y,'--k','LineWidth',0.8*resolution);
%% RRT Algorithm
% Initialize the random tree(in the form of struct)
tree.child = []; % current node
tree.parent = []; % current node's parent
tree.distance = []; % current node's distance to the start
tree.child = start;
tree.parent = start;
tree.distance = 0;
new_node.x = start.x;
new_node.y = start.y;
goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2);
% Main loop
while goal_distance > goal_radius
random_point.x = (right_bound - left_bound) * rand() + left_bound; % random x value between x limit
random_point.y = (upper_bound - lower_bound) * rand() + lower_bound; % random y value between y limit
handle_1 = plot(random_point.x,random_point.y,'p','MarkerEdgeColor',[0.9290 0.6940 0.1250],'MarkerFaceColor',[0.9290 0.6940 0.1250],'MarkerSize',8*resolution); % draw the randomly generated point
[angle,min_idx] = find_closest_node(random_point.x,random_point.y,tree);
% pause(0.5)
handle_2 = plot([tree.child(min_idx).x,random_point.x],[tree.child(min_idx).y,random_point.y],'-','Color',[0.7 0.7 0.7],'LineWidth',0.8*resolution); % draw the segment between the closest tree node and the randomly generated point
% pause(0.5)
new_node.x = tree.child(min_idx).x + grow_distance*cos(angle);
new_node.y = tree.child(min_idx).y + grow_distance*sin(angle);
handle_3 = plot(new_node.x,new_node.y,'.r','MarkerFaceColor','r','MarkerSize',10*resolution); % draw the potential new node
flag = 1; % default: valid node
% Judge if the new node is inside the obstacle
step = 0.01;
if new_node.x < tree.child(min_idx).x
step = -step;
end
for k=1:1:size(ob,1)
for i=tree.child(min_idx).x:step:new_node.x
if angle>pi/2-5e-02 && angle<pi/2+5e-02
j = tree.child(min_idx).y+1;
elseif angle>-pi/2-5e-02 && angle<-pi/2+5e-02
j = tree.child(min_idx).y-1;
else
j=tree.child(min_idx).y+(i-tree.child(min_idx).x)*tan(angle);
end
if i>=ob(k,1) && i<=(ob(k,1)+ob(k,3))
if j >=ob(k,2) && j<=ob(k,2)+ob(k,4)
flag = 0; % invalid node
break
end
end
end
if flag==0
break
end
end
% pause(0.5)
if flag==1
tree.child(end+1) = new_node;
tree.parent(end+1) = tree.child(min_idx);
tree.distance(end+1) = 1 + tree.distance(min_idx);
goal_distance = sqrt((goal.x - new_node.x)^2 + (goal.y - new_node.y)^2);
delete(handle_3)
plot(new_node.x,new_node.y,'.g','MarkerFaceColor','g','MarkerSize',10*resolution); % draw the new node
% pause(0.2)
plot([tree.child(min_idx).x,new_node.x],[tree.child(min_idx).y,new_node.y],'-k','LineWidth',0.8*resolution); % draw the segment between the closest tree node and the new node
end
% pause(0.5)
delete(handle_1);
delete(handle_2);
% pause(0.5)
end
%% Draw the final path
final_distance = tree.distance(end);
title('RRT, distance:',num2str(final_distance));
current_index = length(tree.child);
while current_index ~= 1
plot([tree.child(current_index).x,tree.parent(current_index).x],[tree.child(current_index).y,tree.parent(current_index).y],'-','LineWidth',1.5*resolution,'Color',[0.8500 0.3250 0.0980]); % draw the segment between the closest tree node and the new node
for i=1:length(tree.child)
if tree.child(i).x == tree.parent(current_index).x
if tree.child(i).y == tree.parent(current_index).y
current_index = i;
break
end
end
end
end

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 37
37 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)