AI视觉,人体姿态关键点实时跟踪,附python完整代码
AI视觉,人体姿态关键点实时跟踪,附python完整代码
前言
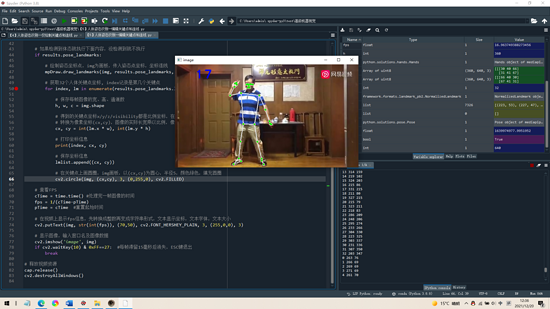
各位同学好,今天和大家分享一下如何使用 MediaPipe 完成 人体姿态关键点 的实时跟踪检测,先放张图看效果,FPS值为17,右下输出框为32个人体关键点的xy坐标。(文末送福利)
有需要的可以使用 cv2.VideoCapture(0) 捕获电脑摄像头。

1. 导入工具包
# 安装opencv
pip install opencv-contrib-python
# 安装mediapipe
pip install mediapipe
# pip install mediapipe --user #有user报错的话试试这个
# 安装之后导入各个包
import cv2 #opencv
import mediapipe as mp
import time
人体姿态检测相关说明见官方文档: Pose - mediapipe (google.github.io)
MediaPipe Pose 中的地标模型预测了 33 个姿势地标的位置(见下图)。
2. 相关函数说明
从mediapipe中导入检测方法,今天我们使用 mediapipe.solutions.pose ,其他的后续章节再写。
mediapipe.solutions.hands # 手部关键点检测
mediapipe.solutions.pose # 人体姿态检测
mediapipe.solutions.face_mesh # 人脸网状检测
mediapipe.solutions.face_detection # 人脸识别
…
(1)mediapipe.solutions.pose.Pose()姿态关键点检测函数
参数:
static_image_mode: 默认为 False ,将输入图像视为视频流。它将尝试在第一张图像中检测最突出的人,并在成功检测后进一步定位姿势地标。在随后的图像中,它只是简单地跟踪那些地标,而不会调用另一个检测,直到失去对目标的跟踪,可以减少计算和延迟。若为 True ,则会对每张输入图像执行人体检测方法,非常适合处理一批静态的、可能不相关的图像。
model_complexity: 默认为 1 ,姿势地标模型的复杂度:0、1 、2。地标准确度和推理延迟通常随着模型复杂度的增加而增加。
smooth_landmarks: 默认为 True ,平滑图像,过滤不同的输入图像上的姿势地标以减少抖动,但如果 static_image_mode 也设置为 True 则忽略。
upper_body_only: 默认为 False ,是否只检测上半身的地标。人体姿势共有33个地标,上半身的姿势地标有25个。
enable_segmentation: 默认为 False 。如果设置为 true,除了姿势地标之外,该解决方案还会生成分割掩码。
smooth_segmentation: 默认为 True ,过滤不同的输入图像上的分割掩码以减少抖动,但如果 enable_segmentation 设置为 False ,或者 static_image_mode 设置为 True 则忽略。
min_detection_confidence: 默认为 0.5 ,来自人员检测模型的最小置信值 (0-1之间) ,高于该阈值则认为检测视为成功。
min_tracking_confidence: 默认为 0.5 。 来自地标跟踪模型的最小置信值 (0-1之间) ,用于将被视为成功跟踪的姿势地标,否则将在下一个输入图像上自动调用人物检测。将其设置为更高的值可以提高解决方案的稳健性,但代价是更高的延迟。如果 static_image_mode 为 True ,则人员检测将在每帧图像上运行。
返回值:
具有 " pose_landmarks " 字段的 NamedTuple 对象,其中包含检测到的最突出人物的姿势坐标。
(2)mediapipe.solutions.drawing_utils.draw_landmarks()绘制手部关键点的连线
参数:
image: 需要画图的原始图片
landmark_list: 检测到的手部关键点坐标
connections: 连接线,需要把那些坐标连接起来
landmark_drawing_spec: 坐标的颜色,粗细
connection_drawing_spec: 连接线的粗细,颜色等
3. 绘制关键点和连线
使用 cv2.VideoCapture() 读取视频文件时,文件路径最好不要出现中文,防止报错。
变量.read() 每次执行就从视频中提取一帧图片 ,需要循环来不断提取。用 success 来接收是否能打开, 返回True表示可以打开 。 img保存返回的每一帧图像 。
由于读入视频图像通道一般为 RGB ,而 opencv 中图像通道的格式为 BGR ,因此需要 cv2.cvtColor() 函数 将opencv读入的视频图像转为RGB格式 cv2.COLOR_BGR2RGB 。
在绘制人体关键点时 mpDraw.draw_landmarks() ; results.pose_landmarks 获取所有关键点信息;如果不传入参数 mpPose.POSE_CONNECTIONS ,那么就不会绘制关键点之间的连线 。
import cv2
import mediapipe as mp
import time
# 导入姿态跟踪方法
mpPose = mp.solutions.pose # 姿态识别方法
pose = mpPose.Pose(static_image_mode=False, # 静态图模式,False代表置信度高时继续跟踪,True代表实时跟踪检测新的结果
#upper_body_only=False, # 是否只检测上半身
smooth_landmarks=True, # 平滑,一般为True
min_detection_confidence=0.5, # 检测置信度
min_tracking_confidence=0.5) # 跟踪置信度
# 检测置信度大于0.5代表检测到了,若此时跟踪置信度大于0.5就继续跟踪,小于就沿用上一次,避免一次又一次重复使用模型
# 导入绘图方法
mpDraw = mp.solutions.drawing_utils
#(1)导入视频
filepath = 'C:\\GameDownload\\Deep Learning\\master.mp4'
cap = cv2.VideoCapture(filepath)
pTime = 0 # 设置第一帧开始处理的起始时间
#(2)处理每一帧图像
while True:
# 接收图片是否导入成功、帧图像
success, img = cap.read()
# 将导入的BGR格式图像转为RGB格式
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 将图像传给姿态识别模型
results = pose.process(imgRGB)
# 查看体态关键点坐标,返回x,y,z,visibility
# print(results.pose_landmarks)
# 如果检测到体态就执行下面内容,没检测到就不执行
if results.pose_landmarks:
# 绘制姿态坐标点,img为画板,传入姿态点坐标,坐标连线
mpDraw.draw_landmarks(img, results.pose_landmarks, mpPose.POSE_CONNECTIONS)
# 查看FPS
cTime = time.time() #处理完一帧图像的时间
fps = 1/(cTime-pTime)
pTime = cTime #重置起始时间
# 在视频上显示fps信息,先转换成整数再变成字符串形式,文本显示坐标,文本字体,文本大小
cv2.putText(img, str(int(fps)), (70,50), cv2.FONT_HERSHEY_PLAIN, 3, (255,0,0), 3)
# 显示图像,输入窗口名及图像数据
cv2.imshow('image', img)
if cv2.waitKey(10) & 0xFF==27: #每帧滞留15毫秒后消失,ESC键退出
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()
绘制人体33个关键点及连线


4. 保存坐标点信息,绘图编辑
接下来,我们 将33个关键点的坐标保存下来 ,并将这些关键点放大一些,使其更加明显。因此我们补充上面的代码。
由于
results.pose_landmarks.landmark 中保存的 xyz坐标是归一化后的 比例坐标 ,即某一像素点在图像的某一比例位置,如[0.5, 0.5]。我们需要将其转为 像素坐标 ,如[200,200], 像素坐标一定是整数 。通过 图像宽高乘以各自比例即可得到像素坐标下的宽高 。为了能更明显的显示关键点,把关键点画的大一些,只需 以关键点的像素坐标为圆心画圆 cv2.circle() 即可。将像素坐标保存到 lmlist 中 。
import cv2
import mediapipe as mp
import time
# 导入姿态跟踪方法
mpPose = mp.solutions.pose # 姿态识别方法
pose = mpPose.Pose(static_image_mode=False, # 静态图模式,False代表置信度高时继续跟踪,True代表实时跟踪检测新的结果
#upper_body_only=False, # 是否只检测上半身
smooth_landmarks=True, # 平滑,一般为True
min_detection_confidence=0.5, # 检测置信度
min_tracking_confidence=0.5) # 跟踪置信度
# 检测置信度大于0.5代表检测到了,若此时跟踪置信度大于0.5就继续跟踪,小于就沿用上一次,避免一次又一次重复使用模型
# 导入绘图方法
mpDraw = mp.solutions.drawing_utils
#(1)导入视频
filepath = 'C:\\GameDownload\\Deep Learning\\master.mp4'
cap = cv2.VideoCapture(filepath)
pTime = 0 # 设置第一帧开始处理的起始时间
#(2)处理每一帧图像
lmlist = [] # 存放人体关键点信息
while True:
# 接收图片是否导入成功、帧图像
success, img = cap.read()
# 将导入的BGR格式图像转为RGB格式
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 将图像传给姿态识别模型
results = pose.process(imgRGB)
# 查看体态关键点坐标,返回x,y,z,visibility
# print(results.pose_landmarks)
# 如果检测到体态就执行下面内容,没检测到就不执行
if results.pose_landmarks:
# 绘制姿态坐标点,img为画板,传入姿态点坐标,坐标连线
mpDraw.draw_landmarks(img, results.pose_landmarks, mpPose.POSE_CONNECTIONS)
# 获取32个人体关键点坐标, index记录是第几个关键点
for index, lm in enumerate(results.pose_landmarks.landmark):
# 保存每帧图像的宽、高、通道数
h, w, c = img.shape
# 得到的关键点坐标x/y/z/visibility都是比例坐标,在[0,1]之间
# 转换为像素坐标(cx,cy),图像的实际长宽乘以比例,像素坐标一定是整数
cx, cy = int(lm.x * w), int(lm.y * h)
# 打印坐标信息
print(index, cx, cy)
# 保存坐标信息
lmlist.append((cx, cy))
# 在关键点上画圆圈,img画板,以(cx,cy)为圆心,半径5,颜色绿色,填充圆圈
cv2.circle(img, (cx,cy), 3, (0,255,0), cv2.FILLED)
# 查看FPS
cTime = time.time() #处理完一帧图像的时间
fps = 1/(cTime-pTime)
pTime = cTime #重置起始时间
# 在视频上显示fps信息,先转换成整数再变成字符串形式,文本显示坐标,文本字体,文本大小
cv2.putText(img, str(int(fps)), (70,50), cv2.FONT_HERSHEY_PLAIN, 3, (255,0,0), 3)
# 显示图像,输入窗口名及图像数据
cv2.imshow('image', img)
if cv2.waitKey(10) & 0xFF==27: #每帧滞留15毫秒后消失,ESC键退出
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()
结果如下,右下输出框打印每一帧图像的关键点的xy坐标信息

知道你对Python感兴趣,便为你准备了这套python学习资料,
对于0基础小白入门:
如果你是零基础小白,想快速入门Python是可以考虑培训的。
一方面是学习时间相对较短,学习内容更全面更集中。
包括:Python web开发,Python爬虫,Python数据分析,人工智能等学习教程。带你从零基础系统性的学好Python!
零基础Python学习资源介绍
👉Python学习路线汇总👈
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。(学习教程文末领取哈)

👉Python必备开发工具👈

温馨提示:篇幅有限,已打包文件夹,获取方式在:文末
👉Python学习视频600合集👈
观看零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。

👉实战案例👈
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

👉100道Python练习题👈
检查学习结果。
👉面试刷题👈



资料领取
这份完整版的Python全套学习资料已经上传网盘,朋友们如果需要可以点击下方微信卡片免费领取 ↓↓↓【保证100%免费】
或者
【点此链接】领取

好文推荐
了解python的前景:https://blog.csdn.net/weixin_49895216/article/details/127186741
了解python能做什么:https://blog.csdn.net/weixin_49895216/article/details/127124870

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 7
7 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)