永磁同步电机高性能控制算法(4)——无模型预测控制(Model-Free Predictive Control/MFPC)—基于扩张状态观测器(Extended State Observer/ESO)
在之前的内容中谈到。为避免PI调节器参数调节困难的问题、PI调节器动态性能不足的问题,我们采用了无差拍预测电流控制(DPCC)。但是DPCC是属于模型预测控制(MPC)中的一种,需要精确的电机参数,但出现参数失配时,系统的性能就会大打折扣。为提高DPCC的鲁棒性,上一小节我们引入了ESO,有效提高了系统的参数鲁棒性。但其实可以发现,在DPCC的基础上,引入了ESO,增加了系统的复杂度,而且还需要系
在之前的内容中谈到。为避免PI调节器参数调节困难的问题、PI调节器动态性能不足的问题,我们采用了无差拍预测电流控制(DPCC)。但是DPCC是属于模型预测控制(MPC)中的一种,需要精确的电机参数,但出现参数失配时,系统的性能就会大打折扣。
为提高DPCC的鲁棒性,上一小节我们引入了ESO,有效提高了系统的参数鲁棒性。但其实可以发现,在DPCC的基础上,引入了ESO,增加了系统的复杂度,而且还需要系统参数。假如我们的观测器ESO,设置的非常好,性能非常nice,那岂不是不需要电机参数吗?确实是这样的。所以我们在这一文中,将介绍,基于ESO的永磁同步电机无模型预测电流控制(Model-Free Predictive Current Control/MFC)。
参考文献:

论文来源:TIE(TOP期刊)
论文作者:国内做预测控制的大佬。(如果大家对电机的预测控制感兴趣,可以多看看张老师的文章)
传统的MFC模型:

u就是系统的输入,刚好就是电机的电压;y就是电机的电流。F为系统的未知扰动(这是需要我们进行估计的)。α为需要调节的参数(过大的话,系统振荡,不稳定)。在式(5)中可以看到,传统的MFC还需要整定参数Kp。而且F的估计也是比较复杂的(文章里面没说,但是大家可以去网上看看。无模型控制是我们中国学者提出的,但也是非常复杂的)。
基于ESO的MFC: (也就是本文提出的模型)
MFC的超局部模型:

基于ESO的MFC方程如上,这个方程其实和上面的第一个式子没啥区别。可以看到这个F相当于把电阻压降、电动势、电感都看成扰动给归类进去了。α就是电感数值的倒数(这个需要注意一下!)。
ESO的表达式:

这个式子和我们上一节讲到的基于ESO的DPCC基本上是差不多的。注意到,我上一节讲DPCC的ESO时,电流误差e = 实际值-估计值。但是这篇文章是,电流误差e = 估计值-实际值,恰好是跟我的相反,所以这里会在e的前面出现负号。
基于ESO的MFC表达式(连续域/s域):
这一步相当于是把上述的两步给结合了一下。

这就相当于把MFC中的ESO模块给搭建出来了。那这个观测器是否是稳定的,那还得证明一下。
ESO的稳定性分析(连续域/s域):

这个稳定性证明是用了特征方程去判断,这和我们上一篇文章证明ESO稳定的方法一模一样。
基于ESO的MFC表达式(离散域/z域):
因为我们刚才建立的都是连续域模型,实际的电机控制系统都是离散的。所以这里要将上述的表达式进行离散化。这个表达式也跟上一节我们谈到的ESO-DPCC的表达式差不多,而且这个表达式要比上一篇文章的表达式简单一些。

ESO的稳定性分析(离散域/z域):
上述已经分析了ESO在连续域的稳定性。现在分析一下ESO在离散域的稳定性。

得到ESO的传递函数之后,就可以得到其特征方程如式(15)所示。根据式(15)即可求出ESO的极点。

从式(17)实际上就可以分析出,ESO带宽w0与ESO离散域极点z的关系了。

文章中有解释到,w0越大,z越接近于0,那么系统的动态性能就越好。为什么会这样呢?w0越大,ESO在s域上的截止频率就越大,截止频率越大,那么系统的动态性能就越好(有很多文章已经做了ESO在s域上的伯德图,大家有兴趣的话可以自己去查阅一下)。在z域上,极点z越靠近0,系统的动态响应就越快。
这样看来,文章的分析也是符合基本的控制理论知识。
参考电压的计算:
建立好ESO的模型之后,就该想想怎么把ESO观测器出来的数据给利用起来。

电机系统的参考电压可以通过式子(20)给计算出来,式子中的is(k+1)和F(k+1)都是由式子(13)估计出来的。
总结一下:基于ESO的无模型预测电流控制,只需要两个参数,第一个是ESO的离散域的极点z,第二个是α。
ESO的极点z,一般配置在0.5左右就差不多了。(文章中配置在z=0.15,这个数值已经非常接近于0了,所以动态性能很好。但是,对于不同的电机,配置在z=0.15的ESO,有可能使系统不稳定)
超局部模型的α,在文章中一开始就提到了,一般选取为电感的倒数。但是这样想想,岂不是又需要电感的参数了吗?实际上,这个α不取为电感的倒数时,系统也会有较好的性能,反正自己取的大概就行了。文章中取了α=50,我自己仿真中取了α=200.
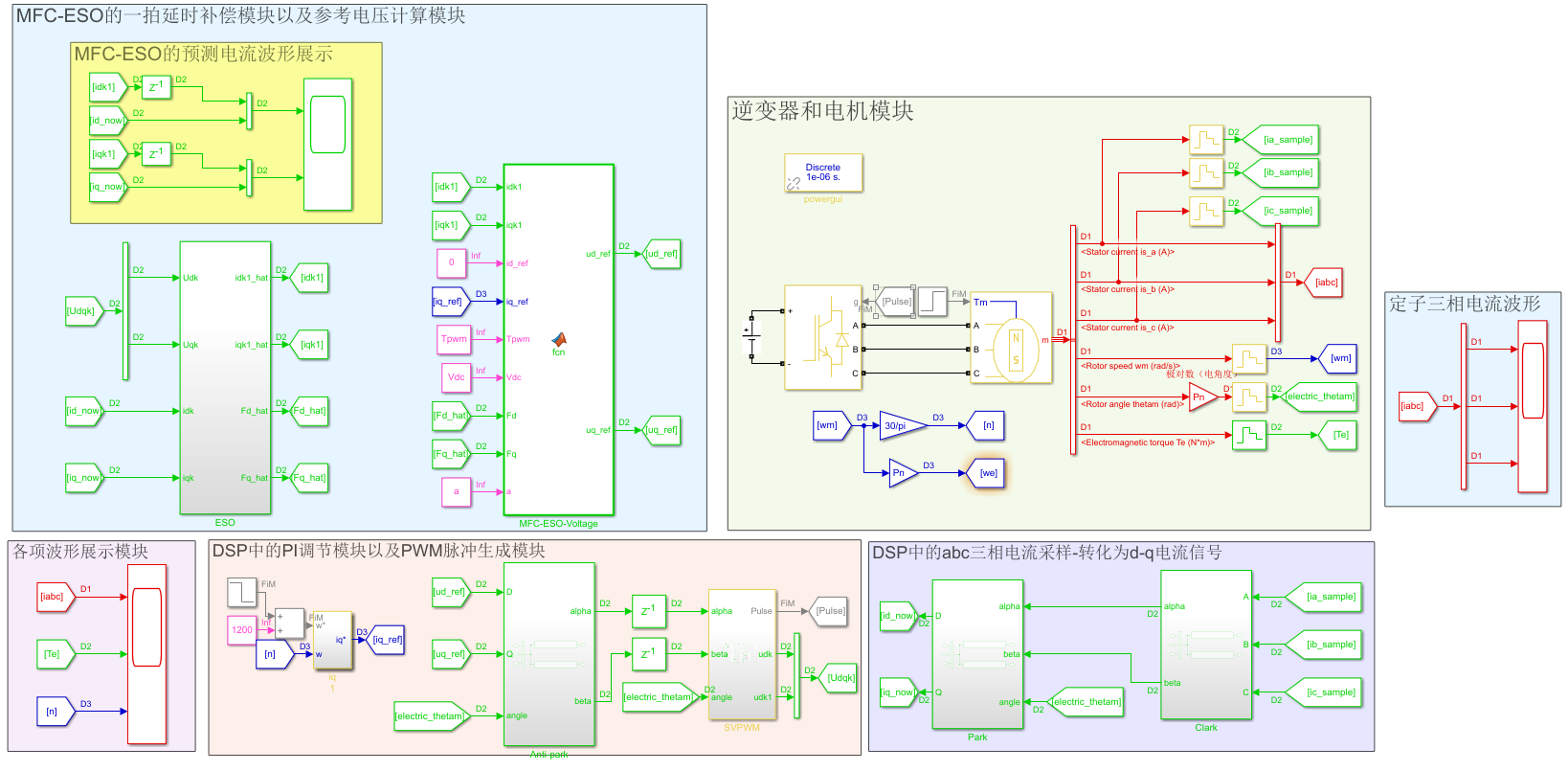
基于ESO的MFC的控制框图:

仿真展示:

这个是参考电压计算模块的代码,看起来就比基于ESO的DPCC简单了很多。

ESO的内部结构如下:(大家可以对比一下上一篇内容,这个ESO模块比DPCC的ESO模块简单了非常多)

仿真参数:
Tpwm = 1e-4;%开关周期
Tspeed = 5e-4;%转速采样周期,在实际DSP系统中,Tspeed会小于Tpwm
Pn = 4;%电机极对数
Vdc = 311;%直流母线电压
iqmax = 30;%额定电流
%这是电机实际参数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
%扩展观测器极点参数配置
c1 = 2*(5000); %这是根据论文取极点z=0.5计算出来的
c2 = (5000)^2;
a = 200; %这个就是α,文章中取50,我这里自己改的,大家随意调一下就好了
仿真波形:(仿真条件:电机空载启动,给定转速为1200r/min;在0.5s时加5N·m负载;在0.35s时,给定转速改为1000r/min。)

从仿真中可以看到,三相电流在启动时没有超过额定值30A,系统也确实具有较好的动态响应能力。

从上图中可以看到,即使不采用任何的电机参数,ESO依旧能够很好地观测电流。也说明了本文所配置地参数的准确性。
接下来进行一下对比的仿真。使用的控制模型有:1.基于PI调节器的传统FOC;2.无差拍预测电流控制(无参数失配);3.基于ESO的无模型预测控制。
稳态相电流THD:



仿真中可以看到,基于ESO的无模型预测控制的相电流THD高了0.1%,高了一点点,而其他两种方法是都是2.28%。但是基于ESO的无模型预测控制的好处是不需要电机参数!别忘了,在PI调节器进行前馈补偿的时候,也需要电机参数的。上述三个模型中,只有基于ESO的无模型预测控制完完全全不需要任何参数!
所以当电机参数失配的时候,基于PI调节器的传统FOC和无差拍预测电流控制的性能都将会下降,因此当然是基于ESO的无模型预测控制具有更大优势!
动态性能对比:



从上述仿真中可以看出:无差拍预测电流控制(无参数失配)具有最快的动态性能,当然这也仅局限于参数不失配的情况下。基于ESO的无模型预测控制具有与无差拍预测电流控制(无参数失配)相近的动态性能。基于PI调节器的传统FOC的动态响应最慢,从图中可以看出,启动时,q轴流超过了最大值30A,而且具有一定的超调,消除超调的时间也比较长!
总结一下:
基于ESO的无模型预测控制的优势:1结构简单。不像DPCC以及基于ESO的DPCC那样复杂、也不需要繁琐的PI调参。2.鲁棒性强。该方法完全不需要电机参数,完全吊打传统的DPCC;传统的PI调节器也会需要电机参数进行前馈补偿;PI调节器配置的时候一般用到零极点对消法,这个也需要电机参数。3.动态性能好。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 6
6 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)