人脸姿态估计(计算欧拉角)
1.什么是人脸姿态估计问题人脸姿态估计主要是获得脸部朝向的角度信息。一般可以用旋转矩阵、旋转向量、四元数或欧拉角表示(这四个量也可以互相转换)。一般而言,欧拉角可读性更好一些,使用更为广泛。本文获得的人脸姿态信息用三个欧拉角(pitch,yaw,roll)表示。欧拉角动图注解pitch:俯仰角,表示物体绕x轴旋转yaw:偏航角,表示物体绕y轴旋转roll:翻滚角,表示物...
1.什么是人脸姿态估计问题
人脸姿态估计主要是获得脸部朝向的角度信息。一般可以用旋转矩阵、旋转向量、四元数或欧拉角表示(这四个量也可以互相转换)。一般而言,欧拉角可读性更好一些,使用更为广泛。本文获得的人脸姿态信息用三个欧拉角(pitch,yaw,roll)表示。
欧拉角动图注解
pitch:俯仰角,表示物体绕x轴旋转

yaw:偏航角,表示物体绕y轴旋转
roll:翻滚角,表示物体绕z轴旋转
2.计算步骤
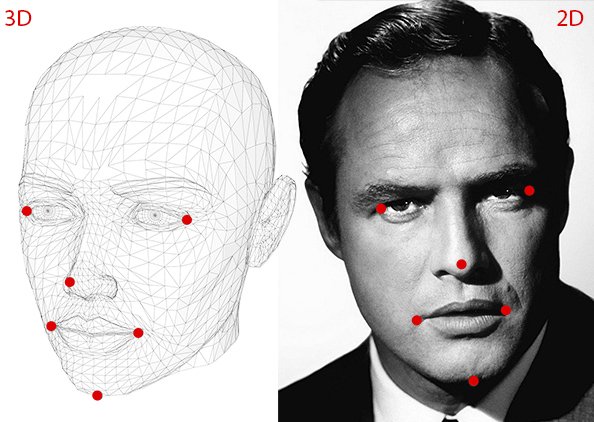
1)首先定义一个具有n个关键点的3D脸部模型,n可以根据自己对准确度的容忍程度进行定义,以下示例定义6个关键点的3D脸部模型(左眼角,右眼角,鼻尖,左嘴角,右嘴角,下颌);
2)采用人脸检测以及面部关键点检测得到上述3D脸部对应的2D人脸关键点;
3)采用Opencv的solvePnP函数解出旋转向量;
4)将旋转向量转换为欧拉角;
3.定义6关键点的3D Model
C++
// 3D model points.
std::vector<cv::Point3d> model_points;
model_points.push_back(cv::Point3d(0.0f, 0.0f, 0.0f)); // Nose tip
model_points.push_back(cv::Point3d(0.0f, -330.0f, -65.0f)); // Chin
model_points.push_back(cv::Point3d(-225.0f, 170.0f, -135.0f)); // Left eye left corner
model_points.push_back(cv::Point3d(225.0f, 170.0f, -135.0f)); // Right eye right corner
model_points.push_back(cv::Point3d(-150.0f, -150.0f, -125.0f)); // Left Mouth corner
model_points.push_back(cv::Point3d(150.0f, -150.0f, -125.0f)); // Right mouth corner
python
# 3D model points.
model_points = np.array([
(0.0, 0.0, 0.0), # Nose tip
(0.0, -330.0, -65.0), # Chin
(-225.0, 170.0, -135.0), # Left eye left corner
(225.0, 170.0, -135.0), # Right eye right corne
(-150.0, -150.0, -125.0), # Left Mouth corner
(150.0, -150.0, -125.0) # Right mouth corner
])68点的3D model下载链接:链接:https://pan.baidu.com/s/162szx0PWl6dvnEHbDTDPAw 密码:ip7v
4.关键点检测
利用相关算法进行人脸关键点检测,一般常见68个关键点检测模型,其具体顺序如下所示,而6个关键点对应的索引id分别为:

下巴:8
鼻尖:30
左眼角:36
右眼角:45
左嘴角:48
右嘴角:54
C++
// 2D image points. If you change the image, you need to change vector
std::vector<cv::Point2d> image_points;
image_points.push_back( cv::Point2d(359, 391) ); // Nose tip
image_points.push_back( cv::Point2d(399, 561) ); // Chin
image_points.push_back( cv::Point2d(337, 297) ); // Left eye left corner
image_points.push_back( cv::Point2d(513, 301) ); // Right eye right corner
image_points.push_back( cv::Point2d(345, 465) ); // Left Mouth corner
image_points.push_back( cv::Point2d(453, 469) ); // Right mouth corner
python
#2D image points. If you change the image, you need to change vector
image_points = np.array([
(359, 391), # Nose tip
(399, 561), # Chin
(337, 297), # Left eye left corner
(513, 301), # Right eye right corne
(345, 465), # Left Mouth corner
(453, 469) # Right mouth corner
], dtype="double")5.用Opencv的solvePnP函数解出旋转向量
OpenCV中solvePnP 和 solvePnPRansac都可以用来估计Pose。第二个solvePnPRansac利用随机抽样一致算法(Random sample consensus,RANSAC)的思想,虽然计算出的姿态更加精确,但速度慢、没法实现实时系统,所以我们这里只关注第一个solvePnP函数,具体的参数可以参见Opencv文档。
solvePnP implements several algorithms for pose estimation which can be selected using the parameter
flag. By default it uses the flag SOLVEPNP_ITERATIVE which is essentially the DLT solution followed by
Levenberg-Marquardt optimization. SOLVEPNP_P3P uses only 3 points for calculating the pose and it
should be used only when using solvePnPRansac.
C++: bool solvePnP(InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray
distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess=false, int
flags=SOLVEPNP_ITERATIVE )
确定pose也就是确定从3D model到图片中人脸的仿射变换矩阵,它包含旋转和平移的信息。solvePnP函数输出结果包括旋转向量(roatation vector)和平移向量(translation vector)。这里我们只关心旋转信息,所以主要将对 roatation vector进行操作。
在调用solvePnP函数前需要初始化cameraMatrix,也就是相机内参,并调用solvePnP函数:
c++
// Camera internals
double focal_length = im.cols; // Approximate focal length.
cv::Point2d center = cv::Point2d(im.cols / 2, im.rows / 2);
cv::Mat camera_matrix = (cv::Mat_<double>(3, 3) << focal_length, 0, center.x, 0, focal_length, center.y, 0, 0, 1);
cv::Mat dist_coeffs = cv::Mat::zeros(4, 1, cv::DataType<double>::type); // Assuming no lens distortion
cv::Mat rotation_vector; // Rotation in axis-angle form
cv::Mat translation_vector;
// Solve for pose
cv::solvePnP(model_points, landmarks, camera_matrix, dist_coeffs, rotation_vector, translation_vector);
python
# Camera internals
focal_length = size[1]
center = (size[1]/2, size[0]/2)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype = "double"
)
print "Camera Matrix :\n {0}".format(camera_matrix)
dist_coeffs = np.zeros((4,1)) # Assuming no lens distortion
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points, camera_matrix, dist_coeffs, flags=cv2.CV_ITERATIVE)
print "Rotation Vector:\n {0}".format(rotation_vector)
print "Translation Vector:\n {0}".format(translation_vector)
6.将旋转向量转换为欧拉角
1)旋转向量—>旋转矩阵—>欧拉角
旋转向量转旋转矩阵
theta = np.linalg.norm(rvec)
r = rvec / theta
R_ = np.array([[0, -r[2][0], r[1][0]],
[r[2][0], 0, -r[0][0]],
[-r[1][0], r[0][0], 0]])
R = np.cos(theta) * np.eye(3) + (1 - np.cos(theta)) * r * r.T + np.sin(theta) * R_
print('旋转矩阵')
print(R)
旋转矩阵转欧拉角
def isRotationMatrix(R):
Rt = np.transpose(R) #旋转矩阵R的转置
shouldBeIdentity = np.dot(Rt, R) #R的转置矩阵乘以R
I = np.identity(3, dtype=R.dtype) # 3阶单位矩阵
n = np.linalg.norm(I - shouldBeIdentity) #np.linalg.norm默认求二范数
return n < 1e-6 # 目的是判断矩阵R是否正交矩阵(旋转矩阵按道理须为正交矩阵,如此其返回值理论为0)
def rotationMatrixToAngles(R):
assert (isRotationMatrix(R)) #判断是否是旋转矩阵(用到正交矩阵特性)
sy = math.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0]) #矩阵元素下标都从0开始(对应公式中是sqrt(r11*r11+r21*r21)),sy=sqrt(cosβ*cosβ)
singular = sy < 1e-6 # 判断β是否为正负90°
if not singular: #β不是正负90°
x = math.atan2(R[2, 1], R[2, 2])
y = math.atan2(-R[2, 0], sy)
z = math.atan2(R[1, 0], R[0, 0])
else: #β是正负90°
x = math.atan2(-R[1, 2], R[1, 1])
y = math.atan2(-R[2, 0], sy) #当z=0时,此公式也OK,上面图片中的公式也是OK的
z = 0
x = x*180.0/3.141592653589793
y = y*180.0/3.141592653589793
z = z*180.0/3.141592653589793
return np.array([x, y, z])
2)旋转向量—>四元数—>欧拉角
# 从旋转向量转换为欧拉角
def get_euler_angle(rotation_vector):
# calculate rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transformed to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
ysqr = y * y
# pitch (x-axis rotation)
t0 = 2.0 * (w * x + y * z)
t1 = 1.0 - 2.0 * (x * x + ysqr)
print('t0:{}, t1:{}'.format(t0, t1))
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w * y - z * x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w * z + x * y)
t4 = 1.0 - 2.0 * (ysqr + z * z)
roll = math.atan2(t3, t4)
print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))
# 单位转换:将弧度转换为度
Y = int((pitch/math.pi)*180)
X = int((yaw/math.pi)*180)
Z = int((roll/math.pi)*180)
return 0, Y, X, Z
PS:
人脸旋转的极限角度:
Pitch -60.4~69.6
Yaw -79.8~75.3
Roll -40.9~63.3误差范围:
Pitch: 5.10
Yaw: 4.20
Roll: 2.40参考博客链接:https://blog.csdn.net/c20081052/article/details/89479970
https://github.com/yuenshome/yuenshome.github.io/issues/9
https://www.learnopencv.com/head-pose-estimation-using-opencv-and-dlib/
https://blog.csdn.net/u013512448/article/details/77804161
https://www.jianshu.com/p/5e130c04a602
参考github链接:https://github.com/guozhongluo/head-pose-estimation-and-face-landmark
https://github.com/yinguobing/head-pose-estimation
https://github.com/lsy17096535/face-landmark
比较有用的github链接:https://github.com/TadasBaltrusaitis/OpenFace

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 35
35 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)