物流自动导引小车(AGV)的设计 (说明书+CAD装配图 零件图 控制系统图+开题报告+任务书+外文翻译)
主要设计工作有:小车机械部分设计(传动部分)、伺服电直流机的选取、各个零部件的强度校核、基本控制系统分析,硬件电路分析、小车运动学分析、控制系统设计以及路径行驶规划策略。所设计的物流小车能够实现自主导引运行、运动轨迹的控制等功能,目标是使其能够按照设定的轨迹进行行驶。AGV具有灵活可靠、柔性化好、效率高、操作简便、可控性强等许多优点,因此在柔性制造系统和自动化工厂中得到了广泛的应用,极大地提高了企
物流自动导引小车(AGV)的设计
摘 要
AGV即自动导引小车,它多位一体,集结了当今科技领域先进的理论和应用技术,综合了声、光、电、计算机等技术。AGV具有灵活可靠、柔性化好、效率高、操作简便、可控性强等许多优点,因此在柔性制造系统和自动化工厂中得到了广泛的应用,极大地提高了企业的生产制造效率和自动化程度。将来的AGV必然向着更为简捷高效的方向发展,会得到进一步推广,其应用领域也必然会随之变的更加广泛。
本课题综合研究分析了国内外AGV的发展情况和现状,决定设计自动导引小车的驱动方式为:两后轮独立驱动。主要设计工作有:小车机械部分设计(传动部分)、伺服电直流机的选取、各个零部件的强度校核、基本控制系统分析,硬件电路分析、小车运动学分析、控制系统设计以及路径行驶规划策略。所设计的物流小车能够实现自主导引运行、运动轨迹的控制等功能,目标是使其能够按照设定的轨迹进行行驶。
关键词:AGV;设计;自动化;程序。
The design of the logistics automatic guided vehicle
Abstract
Automatic guided vehicle (AGV), it is more than one, the assembly of the advanced theory and the application technology in the field of science and technology, combines sound, light, electricity, computer technology.AGV is flexible and reliable, good flexibility, high efficiency, simple operation, strong controllability and so on many merits, so in the flexible manufacturing system and factory automation has been widely used, greatly improve the enterprise production efficiency and automation degree. Future AGV inevitable toward more simple and efficient development, will further promote the, its application field will subsequently become more widely.
This research analyzed the development and current situation of the AGV at home and abroad, decided to design automatic guided vehicle drive to: two rear wheel independent drive. Are included in this paper, the main contents are as follows: car mechanical part design (transmission), servo DC motor selection, checking the strength of all the parts, the basic control system analysis, hardware circuit analysis, kinematics analysis, control system design software and route planning strategy. The finished car to achieve autonomous navigation operation and trajectory control function, the goal is to enable it to set in accordance with the path of travel.
Keywords AGV;design;automation;program
目 录
.3 AGV发展简述 3
1.4 AGV设计的主要内容 4
1.5 本章小结 4
2.3 直流伺服电机的选取 6
2.4 联轴器的设计 9
2.5 蜗杆传动设计 10
2.6 轴的设计及计算 14
2.7 滚动轴承的选取校核 21
2.7.1 前轮轴的轴承 21
2.7.2 后轮轴的轴承 22
2.8 蜗杆轴上的轴承 24
2.9 本章小结 26
3.1.2 鉴相 28
3.1.3 计数的扩展 29
3.1.4 中断系统 30
3.2.3 小车转弯半径 34
3.3 本章小结 36
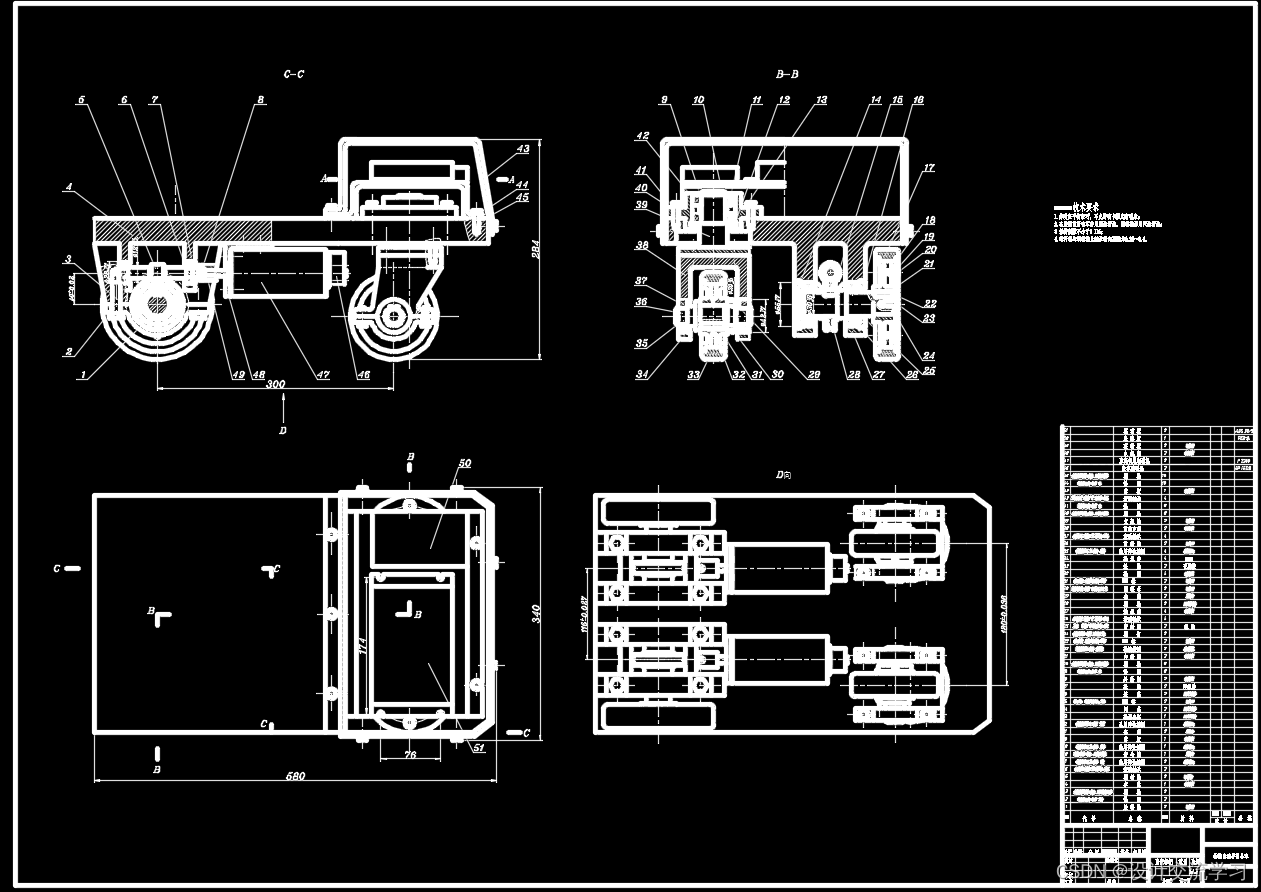
附录A 物流小车装配图 40
附录B 控制系统原理图 40
附录C 小车车体图 41
附录D 蜗轮 41
附录E 蜗杆 42附录F 译文 43
…………



开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)