09_线性系统的稳态误差(静态误差)
计算静态误差的一般方法
线性系统的稳态误差(静态误差)
概述
- 稳态误差是系统的稳态性能指标,是对系统控制精度的衡量
- 对稳定的系统研究稳态误差才有意义
- 通常把在阶跃输入作用下没有原理性稳态误差的系统称为无差系统,而把有原理性误差的系统称为有差系统
误差与稳态误差
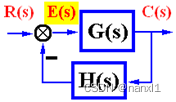
按输入端定义的误差

E ( s ) = R ( s ) − C ( s ) H ( s ) E(s)=R(s)-C(s)H(s) E(s)=R(s)−C(s)H(s)
按输出端定义的误差

E ′ ( s ) = R ( s ) H ( s ) − C ( s ) E'(s)=\frac{R(s)}{H(s)}-C(s) E′(s)=H(s)R(s)−C(s)
稳态误差
{ 静态误差 : e s s = lim t → ∞ e ( t ) = e ( ∞ ) 动态误差 : 误差中的稳态分量 e s ( t ) \begin{cases} 静态误差:\quad e_{ss}=\lim_{t\rightarrow\infty}e(t)=e(\infty)\\ 动态误差:\quad 误差中的稳态分量e_s(t) \end{cases} {静态误差:ess=limt→∞e(t)=e(∞)动态误差:误差中的稳态分量es(t)
Note
- E ( s ) = H ( s ) ⋅ E ′ ( s ) E(s)=H(s)·E'(s) E(s)=H(s)⋅E′(s)
- 一般来说按输入端定义的误差计算,因为该种情况下的物理量一般都能直接测量
- 分析系统误差时,一般计算静态误差
计算稳态误差的一般方法(重点)
- 判定系统的稳定性(必要条件、劳斯判据等)
- 求误差传递函数 Φ e ( s ) = E ( s ) R ( s ) , Φ e n = E ( s ) N ( s ) \Phi_e(s)=\frac{E(s)}{R(s)},\quad\Phi_{en}=\frac{E(s)}{N(s)} Φe(s)=R(s)E(s),Φen=N(s)E(s)
- 用终值定理求稳态误差 e s s = lim s → 0 s [ Φ e ( s ) R ( s ) + Φ e n ( s ) N ( s ) ] e_{ss}=\lim_{s\rightarrow0}s[\Phi_e(s)R(s)+\Phi_{en}(s)N(s)] ess=lims→0s[Φe(s)R(s)+Φen(s)N(s)]
例题
例1 系统结构图如图所示,已知 r ( t ) = n ( t ) = t r(t)=n(t)=t r(t)=n(t)=t,求系统的稳态误差

Φ e ( s ) = E ( s ) R ( s ) = 1 1 + K s ( T s + 1 ) = s ( T s + 1 ) s ( T s + 1 ) + K D ( s ) = T s 2 + s + K = 0 , 系统稳定 Φ ( e n ) = E ( s ) N ( s ) = − K n T n s + 1 1 + K s ( T s + 1 ) = − K n s ( T s + 1 ) [ s ( T s + 1 ) + K ] ( T n s + 1 ) e s s = lim s → 0 s [ R ( s ) Φ e ( s ) + N ( s ) Φ e n ( s ) ] = lim s → 0 [ T s + 1 s ( T s + 1 ) + K − K n ( T s + 1 ) [ s ( T s + 1 ) + K ] ( T n s + 1 ) ] = 1 K + K n K = 1 + K n K \begin{aligned} \Phi_e(s)&=\frac{E(s)}{R(s)}=\frac{1}{1+\frac{K}{s(Ts+1)}}=\frac{s(Ts+1)}{s(Ts+1)+K}\\ D(s)&=Ts^2+s+K=0,\quad系统稳定\\ \Phi(en)&=\frac{E(s)}{N(s)}=-\frac{\frac{K_n}{T_ns+1}}{1+\frac{K}{s(Ts+1)}}=-\frac{K_ns(Ts+1)}{[s(Ts+1)+K](T_ns+1)}\\ e_{ss}&=\lim_{s\rightarrow0}s[R(s)\Phi_e(s)+N(s)\Phi_{en}(s)]=\lim_{s\rightarrow0}[\frac{Ts+1}{s(Ts+1)+K}-\frac{K_n(Ts+1)}{[s(Ts+1)+K](T_ns+1)}]\\ &=\frac{1}{K}+\frac{K_n}{K}=\frac{1+K_n}{K}\\ \end{aligned} Φe(s)D(s)Φ(en)ess=R(s)E(s)=1+s(Ts+1)K1=s(Ts+1)+Ks(Ts+1)=Ts2+s+K=0,系统稳定=N(s)E(s)=−1+s(Ts+1)KTns+1Kn=−[s(Ts+1)+K](Tns+1)Kns(Ts+1)=s→0lims[R(s)Φe(s)+N(s)Φen(s)]=s→0lim[s(Ts+1)+KTs+1−[s(Ts+1)+K](Tns+1)Kn(Ts+1)]=K1+KKn=K1+Kn
例2 系统结构图如图所示,求 r ( t ) r(t) r(t)分别为 A ⋅ 1 ( t ) , A t , A t 2 / 2 A·1(t),At,At^2/2 A⋅1(t),At,At2/2 时系统的稳态误差

Φ e ( s ) = E ( s ) R ( s ) = 1 1 + K s ( T s + 1 ) = s ( T s + 1 ) s ( T s + 1 ) + K D ( s ) = T s 2 + s + K 系统稳定 e s s = lim s → 0 s ⋅ Φ e ( s ) R ( s ) 当 r ( t ) = A ⋅ 1 ( t ) 时, R ( s ) = A s e s s = lim s → 0 A ⋅ s ( T s + 1 ) s ( T s + 1 ) + K = 0 当 r ( t ) = A t 时, R ( s ) = A s 2 e s s = lim s → 0 A T s + 1 s ( T s + 1 ) + K = A K 当 r ( t ) = A t 2 / 2 时, R ( s ) = A s 3 e s s = lim s → 0 A s T s + 1 s ( T s + 1 ) + K = lim s → 0 A s K = ∞ \begin{aligned} \Phi_e(s)&=\frac{E(s)}{R(s)}=\frac{1}{1+\frac{K}{s(Ts+1)}}=\frac{s(Ts+1)}{s(Ts+1)+K}\\ D(s)&=Ts^2+s+K\quad 系统稳定\\ e_{ss}&=\lim_{s\rightarrow0}s·\Phi_e(s)R(s)\\ 当&\quad r(t)=A·1(t)时,R(s)=\frac{A}{s}\\ e_{ss}&=\lim_{s\rightarrow0}A·\frac{s(Ts+1)}{s(Ts+1)+K}=0\\ 当&\quad r(t)=At时,R(s)=\frac{A}{s^2}\\ e_{ss}&=\lim_{s\rightarrow0}A\frac{Ts+1}{s(Ts+1)+K}=\frac{A}{K}\\ 当&\quad r(t)=At^2/2时,R(s)=\frac{A}{s^3}\\ e_{ss}&=\lim_{s\rightarrow0}\frac{A}{s}\frac{Ts+1}{s(Ts+1)+K}=\lim_{s\rightarrow0}\frac{A}{sK}=\infty\\ \end{aligned} Φe(s)D(s)ess当ess当ess当ess=R(s)E(s)=1+s(Ts+1)K1=s(Ts+1)+Ks(Ts+1)=Ts2+s+K系统稳定=s→0lims⋅Φe(s)R(s)r(t)=A⋅1(t)时,R(s)=sA=s→0limA⋅s(Ts+1)+Ks(Ts+1)=0r(t)=At时,R(s)=s2A=s→0limAs(Ts+1)+KTs+1=KAr(t)=At2/2时,R(s)=s3A=s→0limsAs(Ts+1)+KTs+1=s→0limsKA=∞
- e s s e_{ss} ess与系统自身的参数结构有关
- e s s e_{ss} ess与外作用的类型有关(控制量,扰动量及作用点)
- e s s e_{ss} ess与外作用的形式有关(阶跃,斜坡或加速度等)
静态误差系数法(掌握)

G ( s ) = G 1 ( s ) H ( s ) = K ( τ 1 s + 1 ) . . . ( τ m s + 1 ) s v ( T 1 s + 1 ) . . . ( T n − v s + 1 ) = K s v G 0 ( s ) G 0 ( s ) = ( τ 1 s + 1 ) . . . ( τ m s + 1 ) ( T 1 s + 1 ) . . . ( T n − v s + 1 ) lim s → 0 G 0 ( s ) = 1 Φ e ( s ) = E ( s ) R ( s ) = 1 1 + K s v G 0 ( s ) e s s = lim s → 0 s Φ e ( s ) R ( s ) = lim s → 0 s ⋅ R ( s ) ⋅ 1 1 + K s v G 0 ( s ) \begin{aligned} G(s)&=G_1(s)H(s)=\frac{K(\tau_1s+1)...(\tau_ms+1)}{s^v(T_1s+1)...(T_{n-v}s+1)}=\frac{K}{s^v}G_0(s)\\ G_0(s)&=\frac{(\tau_1s+1)...(\tau_ms+1)}{(T_1s+1)...(T_{n-v}s+1)}\qquad\lim_{s\rightarrow0}G_0(s)=1\\ \Phi_e(s)&=\frac{E(s)}{R(s)}=\frac{1}{1+\frac{K}{s^vG_0(s)}}\\ e_{ss}&=\lim_{s\rightarrow0}s\Phi_e(s)R(s)=\lim_{s\rightarrow0}s·R(s)·\frac{1}{1+\frac{K}{s^v}G_0(s)}\\ \end{aligned} G(s)G0(s)Φe(s)ess=G1(s)H(s)=sv(T1s+1)...(Tn−vs+1)K(τ1s+1)...(τms+1)=svKG0(s)=(T1s+1)...(Tn−vs+1)(τ1s+1)...(τms+1)s→0limG0(s)=1=R(s)E(s)=1+svG0(s)K1=s→0limsΦe(s)R(s)=s→0lims⋅R(s)⋅1+svKG0(s)1
核心公式(***)
e s s = lim s → 0 s Φ e ( s ) R ( s ) = lim s → 0 s ⋅ R ( s ) ⋅ 1 1 + K s v G 0 ( s ) e_{ss}=\lim_{s\rightarrow0}s\Phi_e(s)R(s)=\lim_{s\rightarrow0}s·R(s)·\frac{1}{1+\frac{K}{s^v}G_0(s)} ess=s→0limsΦe(s)R(s)=s→0lims⋅R(s)⋅1+svKG0(s)1
- 稳态误差 e s s e_{ss} ess只与输入 r ( t ) r(t) r(t)和系统结构参数 ( K , v ) (K,v) (K,v)有关
- 该方法的本质是将 e s s e_{ss} ess的表达式转换成与 输入信号和系统结构参数相关的形式;因此一旦确定了输入信号和系统的结构参数,能迅速得到静态误差
- K: 系统的开环增益
- v: 表示系统类别
几个重要的系数
首先进一步将
e
s
s
e_{ss}
ess化简
e
s
s
=
lim
s
→
0
s
⋅
R
(
s
)
⋅
1
1
+
K
s
v
e_{ss}=\lim_{s\rightarrow0}s·R(s)·\frac{1}{1+\frac{K}{s^v}}\\
ess=s→0lims⋅R(s)⋅1+svK1
静态位置误差系数: K p = lim s → 0 K s v K_p=\lim_{s\rightarrow0}\frac{K}{s^v} Kp=lims→0svK
当 r ( t ) = A ⋅ 1 ( t ) 时 , R ( s ) = A s e s s = A 1 + lim s → 0 K s v K p = lim s → 0 K s v 称为静态位置误差系数 e s s p = A 1 + K p \begin{aligned} 当\quad r(t)&=A·1(t)时,\quad R(s)=\frac{A}{s}\\ e_{ss}&=\frac{A}{1+\lim_{s\rightarrow0}\frac{K}{s^v}}\\ K_p&=\lim_{s\rightarrow0}\frac{K}{s^v}\qquad称为静态位置误差系数\\ e_{ssp}&=\frac{A}{1+K_p} \end{aligned} 当r(t)essKpessp=A⋅1(t)时,R(s)=sA=1+lims→0svKA=s→0limsvK称为静态位置误差系数=1+KpA
静态速度误差系数: K v = lim s → 0 K s v − 1 K_v=\lim_{s\rightarrow0}\frac{K}{s^{v-1}} Kv=lims→0sv−1K
当 r ( t ) = A ⋅ t 时 , R ( s ) = A s 2 e s s = lim s → 0 A s ⋅ 1 1 + K s v = A lim s → 0 K s v − 1 K v = lim s → 0 K s v − 1 称为静态速度误差系数 e s s v = A K v \begin{aligned} 当\quad r(t)&=A·t时,\quad R(s)=\frac{A}{s^2}\\ e_{ss}&=\lim_{s\rightarrow0}\frac{A}{s}·\frac{1}{1+\frac{K}{s^v}}=\frac{A}{\lim_{s\rightarrow0}\frac{K}{s^{v-1}}}\\ K_v&=\lim_{s\rightarrow0}\frac{K}{s^{v-1}}\qquad 称为静态速度误差系数\\ e_{ssv}&=\frac{A}{K_v} \end{aligned} 当r(t)essKvessv=A⋅t时,R(s)=s2A=s→0limsA⋅1+svK1=lims→0sv−1KA=s→0limsv−1K称为静态速度误差系数=KvA
静态加速度误差系数: K a = lim s → 0 K s v − 2 K_a=\lim_{s\rightarrow0}\frac{K}{s^{v-2}} Ka=lims→0sv−2K
当 r ( t ) = A 2 t 2 时 , R ( s ) = A s 3 e s s = lim s → 0 A s 2 ⋅ 1 1 + K s v = A lim s → 0 K s v − 2 K a = lim s → 0 K s v − 2 e s s a = A K a \begin{aligned} 当\quad r(t)&=\frac{A}{2}t^2时, \quad R(s)=\frac{A}{s^3}\\ e_{ss}&=\lim_{s\rightarrow0}\frac{A}{s^2}·\frac{1}{1+\frac{K}{s^v}}=\frac{A}{\lim_{s\rightarrow0}\frac{K}{s^{v-2}}}\\ K_a&=\lim_{s\rightarrow0}\frac{K}{s^{v-2}}\\ e_{ssa}&=\frac{A}{K_a} \end{aligned} 当r(t)essKaessa=2At2时,R(s)=s3A=s→0lims2A⋅1+svK1=lims→0sv−2KA=s→0limsv−2K=KaA
重要结论

-
V越大系统越容易稳定
-
输入信号中t的次数越大,系统越难稳定
-
当t的次数大于v时,稳态误差为 ∞ \infty ∞ 系统不稳定
-
当t的次数与v相等时,稳态误差存在,且只与开环增益K有关(其他参数已确定), 且只有V=0时计算公式不同
-
当t的次数小于v时,稳态误差为0 系统稳定
例题
例3

- K 、 v K、v K、v由开环传递函数 G ( s ) G(s) G(s)确定
- K K K由 G ( s ) G(s) G(s)的尾1形式求出
- v v v则看 G ( s ) G(s) G(s)积分环节的个数
例4

例5

- 在主反馈口到干扰作用点之间的前向通道中提高增益、设置积分环节,可以同时减小或消除控制输入和干扰作用下产生的稳态误差。
- 静态误差系数法只有在输入输出的情况下可以使用
总结
计算稳态误差的一般方法(重点)
- 判定系统的稳定性(必要条件、劳斯判据等)
- 求误差传递函数 Φ e ( s ) = E ( s ) R ( s ) , Φ e n = E ( s ) N ( s ) \Phi_e(s)=\frac{E(s)}{R(s)},\quad\Phi_{en}=\frac{E(s)}{N(s)} Φe(s)=R(s)E(s),Φen=N(s)E(s)
- 用终值定理求稳态误差 e s s = lim s → 0 s [ Φ e ( s ) R ( s ) + Φ e n ( s ) N ( s ) ] e_{ss}=\lim_{s\rightarrow0}s[\Phi_e(s)R(s)+\Phi_{en}(s)N(s)] ess=lims→0s[Φe(s)R(s)+Φen(s)N(s)]
参考资料

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐

 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)