Simulink + Carsim 验证车辆运动学模型
通过 Simulink/Carsim联合仿真,验证了车轮运动学模型。
·
目录
主函数模板 Main_KinematicModel_Validation()
离散化模型子函数 func_UpdateState_EulerM_2_7()
1 运动学模型
![]()
模型推导:

2 matlab 代码实现
在 MATLAB/Simulink 环境中搭建该运动学模型,在相同输入条件下与 Carsim 中所建立的整车模型进行对比,相同的输入条件是指前轮偏角与车速随时间的变换历程相同,输出均为车辆位置和航向。
主函数模板 Main_KinematicModel_Validation()
function [sys,x0,str,ts] =Main_KinematicModel_Validation(t,x,u,flag)
switch flag,
case 0
[sys,x0,str,ts] = mdlInitializeSizes;
case 2
sys = mdlUpdates(t,x,u);
case 3
sys = mdlOutputs(t,x,u);
case {1,4,9}
sys = [];
otherwise
error(['unhandled flag = ',num2str(flag)]);
end
end初始化子函数 mdlInitializeSizes()
function [sys,x0,str,ts] = mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 5;
sizes.NumOutputs = 10; % 10个输入
sizes.NumInputs = 10; % 10个输出
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = zeros(sizes.NumDiscStates,1);
str = [];
ts = [0.05 0]; % 采样时间
global InitialGapflag;
InitialGapflag = 0; % 忽略来自 carsim 的前几个输入
global Previous_States; % 存储之前的状态变量
Previous_States.X_pred = 0.0;
Previous_States.Y_pred = 0.0;
Previous_States.Yaw_pred = 0.0;
endmdlUpdates()
function sys = mdlUpdates(t,x,u)
sys = x;
endmdlOutputs() 算法主体
采集 carsim 状态信息
global InitialGapflag;
global Previous_States;
lfr = 2.70; % 轴距
Ts = 0.05;
Steer_ratio = 1; % RLS估算方向盘与前轮传动比,暂时不用
%% 提取CarSim输入到Simulink的数据
x_L2 = u(1); % 左后轮 x 坐标
x_R2 = u(2); % 右后轮 x 坐标
y_L2 = u(3); % 左后轮 y 坐标
y_R2 = u(4); % 右后轮 y 坐标
Yaw = u(5) * pi / 180; % 航向角Unit:deg-->rad
Steer_SW = u(6); % 方向盘角度 steering wheel
Steer_L1 = u(7); % 左前轮偏角
Steer_R1 = u(8); % 右前轮偏角
Vx_L2 = u(9); % 左后轮纵向速度,Unit:km/h
Vx_R2 = u(10); % 右后轮纵向速度,Unit:km/h
%% 坐标换算
Car_X = 0.5 * (x_L2 + x_R2); % 后轴中心X坐标,Unit:m
Car_Y = 0.5 * (y_L2 + y_R2); % 后轴中心Y坐标,Unit:m
Vx_km_h = 0.5 * (Vx_L2 + Vx_R2); % 后轴中心处纵向速度,Unit:km/h
Steer_deg = 0.5 * (Steer_L1 + Steer_R1); % 等效前轮偏角,Unit:deg
Vx_m_s = Vx_km_h / 3.6; % 后轴中心处纵向速度, Unit:m/s
Steer_rad = Steer_deg * pi / 180; % 等效前轮偏角 Unit:degs-->rad;运动学模型离散化预测
if (InitialGapflag < 3) % Ignore the first few inputs
InitialGapflag = InitialGapflag + 1;
%% 状态初始化
X_pred = Car_X;
Y_pred = Car_Y;
Yaw_pred = Yaw;
Previous_States.X_pred = Car_X;
Previous_States.Y_pred = Car_Y;
Previous_States.Yaw_pred = Yaw;
else % start control
%% 预测下一时刻状态
Updated_state = func_UpdateState_EulerM_2_7(Previous_States, lfr, Vx_m_s, Steer_rad, Ts);
X_pred = Updated_state.X_pred;
Y_pred = Updated_state.Y_pred;
Yaw_pred = Updated_state.Yaw_pred;
Previous_States.X_pred = X_pred;
Previous_States.Y_pred = Y_pred;
Previous_States.Yaw_pred = Yaw_pred;
end
sys = [Car_X; Car_Y; Yaw; X_pred; Y_pred; Yaw_pred; Vx_m_s; Steer_rad; Steer_SW; Steer_ratio];离散化模型子函数 func_UpdateState_EulerM_2_7()
function [Updated_state] = func_UpdateState_EulerM_2_7(Previous_States, lfr, Vx_m_s, u, Ts)
X_init = Previous_States.X_pred;
Y_init = Previous_States.Y_pred;
Yaw_init = Previous_States.Yaw_pred;
Updated_state.X_pred = X_init + Ts * Vx_m_s*cos(Yaw_init);
Updated_state.Y_pred = Y_init + Ts * Vx_m_s*sin(Yaw_init);
Updated_state.Yaw_pred = Yaw_init + Ts * Vx_m_s*tan(u)/lfr; % u 是前轮转角
endSimulink 搭建

3 carsim 搭建
车身设置

路况设置

添加 I/O 变量

添加 10 个输出变量

4 验证结果
工况1:速度恒定 18Km/h、方向盘恒转矩
carsim 设置工况

simulink 查看方向盘转角、前轮转角
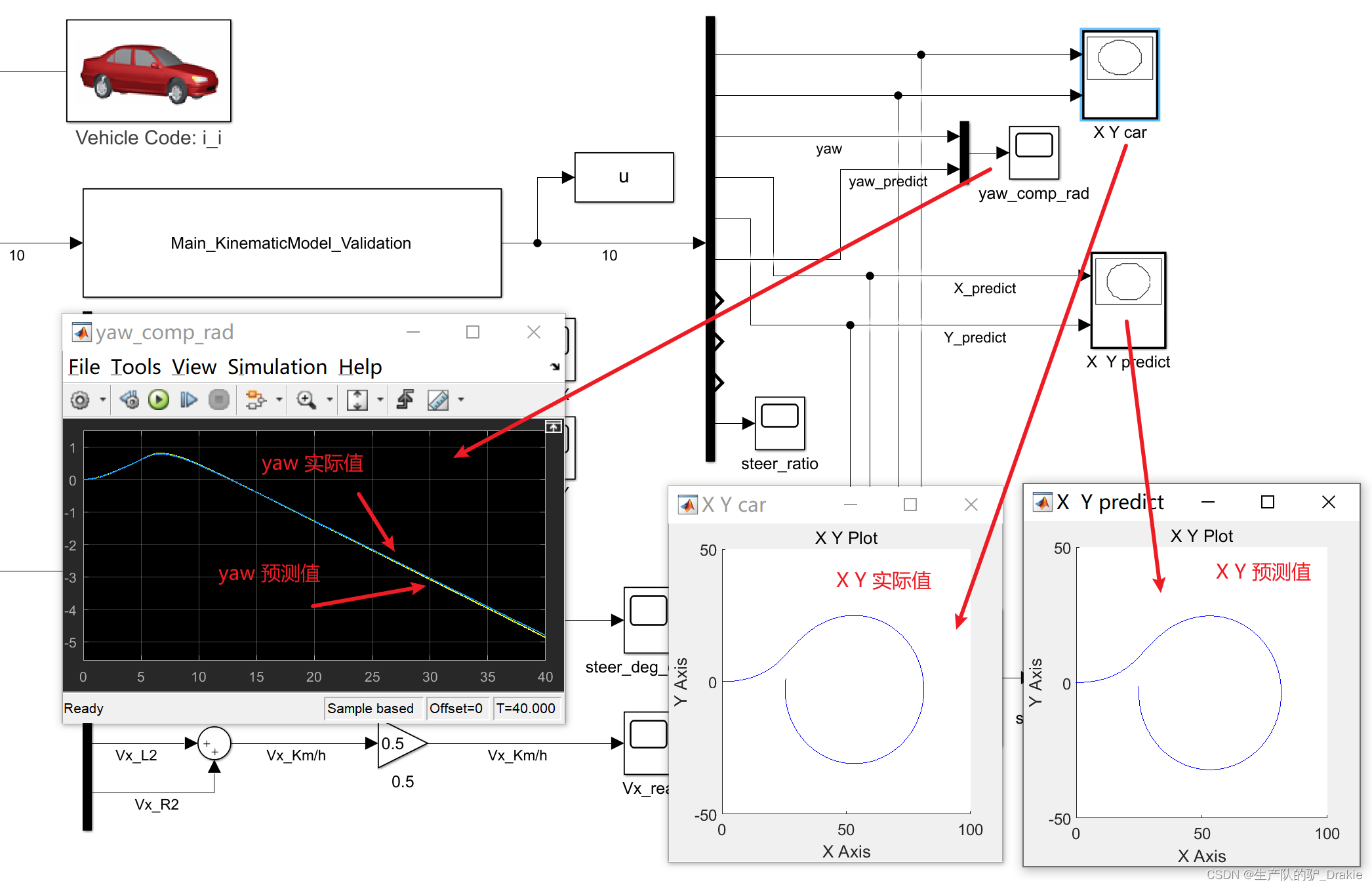
 simulink 对比 yaw 、X Y 位置
simulink 对比 yaw 、X Y 位置

carsim动画效果:

结论:通过模型得出的小车X Y 位置、横摆角,和 实际 carsim中的结果重合度较高,因此运动学模型可以用在小车控制算法设计中。
工况2:车速恒定、转角为自定义sin 函数
carsim设置工况
添加车轮转角变化规律

MATLAB 生成 sin 轨迹点

Carsim 中添加运动规律

simulink 查看方向盘转角、前轮转角:

simulink 仿真结果 yaw 对比

simulink 仿真结果 X Y对比

X Y 精确对比:

carsim X Y 轨迹动画

结论:车轮运动学模型在中低速情况下实际拟合效果良好。
工况3:速度恒定 72Km/h、方向盘恒转矩
simulink 仿真结果 X Y 对比

精确对比 X Y:

simulink 仿真结果 yaw 对比

结论:运动学模型没有考虑轮胎侧滑等实际工况,所以只使用于中低速情况,在高速情况下模型不准确,不能用于模型预测控制。
5 基于递推最小二乘法的转向传动比估计
待补充..

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 25
25 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)