MATLAB【数字图像处理】 实验三:空域频域图像去噪与锐化
1、熟悉空域和频域增强方法,理解并掌握常用平滑和锐化方法。1)对一幅带有噪声图像采用空域和频域的滤波方法实现平滑处理,空域和频域至少选择一种方法自己编写代码实现,并比较、分析不同窗口大小的滤波方法对其结果的影响(图自选);2)对1)经过平滑处理过后的图像进行锐化处理,要求分别采用空域和频域的滤波方法实现锐化处理,空域和频域至少选择一种方法自己编写代码实现;3)写出实验报告。报告要求:有实验目的,实
一、实验目的
1、熟悉空域和频域增强方法,理解并掌握常用平滑和锐化方法
二、实验环境
Matlab 2020B
三、实验内容
题目
1)对一幅带有噪声图像采用空域和频域的滤波方法实现平滑处理,空域和频域至少选择一种方法自己编写代码实现,并比较、分析不同窗口大小的滤波方法对其结果的影响(图自选);
2)对1)经过平滑处理过后的图像进行锐化处理,要求分别采用空域和频域的滤波方法实现锐化处理,空域和频域至少选择一种方法自己编写代码实现;
3)写出实验报告。报告要求:有实验目的,实验内容,实验过程,实验小结和较详细的图文说明。
相关知识
利用空域滤波方法实现的平滑处理时,最基本的两种办法为中值滤波与均值滤波。
中值滤波是非线性滤波器,需要取当前像素点为中心点,选取邻域(4邻域、8邻域或其他形式、其他窗口大小的邻域),将当前像素值改为这个窗口区域中的中位数(中值)。
均值滤波是线性滤波器。取某一像素点为中心点,选取邻域(4邻域、8邻域或其他形式、其他窗口大小的区域),将当前像素值改为这个区域中的数值的平均值或加权平均值。
在均值滤波中,可以使用平均值。使用滑动平均值(Moving Average)时,对于某一点,对其截取出8邻域,并以其8邻域灰度级的平均值作为该点的灰度级值。即:
∑
i
=
1
3
∑
j
=
1
3
1
9
p
(
i
,
j
)
\sum_{i=1}^3\sum_{j=1}^3\frac 19p(i,j)
i=1∑3j=1∑391p(i,j)
使用加权平均值时,其周围邻域中每一个点都被赋予了不同的权值作为掩膜。即:
∑
i
=
1
N
∑
j
=
1
M
w
(
i
,
j
)
p
(
i
,
j
)
\sum_{i=1}^N\sum_{j=1}^Mw(i,j)p(i,j)
i=1∑Nj=1∑Mw(i,j)p(i,j)
常用的掩膜除了滑动平均值,还包括Sobel算子:
(
−
1
0
1
−
2
0
2
−
1
0
1
)
\begin{pmatrix}-1&0&1\\-2&0&2\\-1&0&1\end{pmatrix}
−1−2−1000121
用于计算在
x
x
x轴方向上的梯度
∂
P
∂
x
\frac{\partial P}{\partial x}
∂x∂P,
(
−
1
−
2
−
1
0
0
0
1
2
1
)
\begin{pmatrix}-1&-2&-1\\0&0&0\\1&2&1\end{pmatrix}
−101−202−101
用于计算在
y
y
y轴方向上的梯度
∂
P
∂
y
\frac{\partial P}{\partial y}
∂y∂P。
需要说明的是,对图像在频域空间上也可以实现平滑处理。对于一张空域图像,利用傅里叶变换可以将图像变为频域图像。
F
(
u
)
=
∫
−
∞
∞
f
(
x
)
e
−
j
2
π
u
x
d
x
F(u)=\int_{-\infty}^{\infty}f(x)e^{-j2\pi ux}dx
F(u)=∫−∞∞f(x)e−j2πuxdx
利用逆傅里叶变换也可以将频域图像变回空域图像。
f
(
u
)
=
∫
−
∞
∞
F
(
u
)
e
j
2
π
u
x
d
u
f(u)=\int_{-\infty}^{\infty}F(u)e^{j2\pi ux}du
f(u)=∫−∞∞F(u)ej2πuxdu
由于图像是离散的,所以需要利用离散傅列变换。在2维空间的离散傅里叶变换公式如下:
F
(
u
,
v
)
=
1
M
N
∑
x
=
0
M
−
1
∑
y
=
0
N
−
1
f
(
x
,
y
)
e
−
j
2
π
(
u
x
/
M
+
v
y
/
N
)
F(u,v)=\frac 1{MN}\sum_{x=0}^{M-1}\sum_{y=0}^{N-1}f(x,y)e^{-j2\pi(ux/M+vy/N)}
F(u,v)=MN1x=0∑M−1y=0∑N−1f(x,y)e−j2π(ux/M+vy/N)
2维空间的离散傅里叶变换的逆变换公式如下:
f
(
x
,
y
)
=
∑
u
=
0
M
−
1
∑
v
=
0
N
−
1
F
(
u
,
v
)
e
j
2
π
(
u
x
/
M
+
v
y
/
N
)
f(x,y)=\sum_{u=0}^{M-1}\sum_{v=0}^{N-1}F(u,v)e^{j2\pi(ux/M+vy/N)}
f(x,y)=u=0∑M−1v=0∑N−1F(u,v)ej2π(ux/M+vy/N)
在频域空间中也可以设置滤波器,常用的平滑滤波器是低通滤波器,低通滤波器保留了低频率的成分,丢失了高频率的成分,使得图像保留了颜色等特征而丢失了部分细节。
在进行图像增强时,也可以使用空域滤波的方法和频域滤波的方法。
使用空域滤波的方法对图像进行增强时,可以先将原图像平滑,将原图和平滑后的图像作差,得到一个掩膜。将掩膜赋予一个权重再加到原图像中,得到新图像即为锐化、增强之后的图像。同样的,这一个掩膜可以通过上文中的Sobel算子得到,也可以用于进一步计算梯度幅度。
使用频域滤波的方法对图像进行增强时,使用高通滤波器,过滤掉图像的颜色而提取出图像的轮廓。同样的,将图像的轮廓加权后与原图相加,得到增强后的图像。
需要说明的是,为了给图像添加噪声,可以利用imnoise函数。当参数指定为”gaussian”时,添加高斯噪声。当参数指定为”possion”时,添加了泊松噪声。
部分核心代码
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
imshow(G)
[h,w]=size(I);
res=zeros(h,w);
for i=2:h-1
for j=2:w-1
res(i,j)=(G(i-1,j-1)+G(i,j-1)+G(i+1,j-1)+G(i-1,j)+G(i,j)+G(i+1,j)+G(i-1,j+1)+G(i,j+1)+G(i+1,j+1))/9;
end
end
subplot(1,3,1);imshow(I);title('原图')
subplot(1,3,2);imshow(G);title('噪声')
subplot(1,3,3);imshow(res);title('新图')
利用imnoise函数添加噪声,并实现了滑动平均值实现了图像的平滑,平滑的范围针对的是八邻域。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
imshow(I)
[h,w]=size(I);
res=zeros(h,w);
for i=2:h-1
for j=2:w-1
res(i,j)=(-I(i-1,j-1)-I(i,j-1)-I(i+1,j-1)-I(i-1,j)+9*I(i,j)-I(i+1,j)-I(i-1,j+1)-I(i,j+1)-I(i+1,j+1));
end
end
imshow(res)
subplot(1,3,1);imshow(I);title('原图')
subplot(1,3,3);imshow(res);title('新图')
读入图像,使用空域的方法对其增强。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
imshow(G)
[h,w]=size(I);
res2=zeros(h,w);
for i=2:h-1
for j=2:w-1
res2(i,j)=(G(i,j-1)+G(i-1,j)+G(i,j)+G(i+1,j)+G(i,j+1))/5;
end
end
subplot(1,3,1);imshow(I);title('原图')
subplot(1,3,2);imshow(G);title('噪声')
subplot(1,3,3);imshow(res2);title('新图')
利用imnoise函数添加噪声,并实现了滑动平均值实现了图像的平滑,平滑的范围针对的是四邻域。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
[h,w]=size(I);
res=zeros(h,w);
for i=2:h-1
for j=2:w-1
neighbor=G(i-1:i+1,j-1:j+1); %截取邻域
res(i,j)=median(neighbor(:)); %中值滤波
end
end
subplot(1,3,1);imshow(I);title('原图')
subplot(1,3,2);imshow(G);title('噪声')
subplot(1,3,3);imshow(res);title('新图')
利用imnoise函数添加噪声,并实现了中值滤波实现了图像的平滑。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
[h,w]=size(I);
B=ones(3,3)/9;
res=conv2(G,B);
利用imnoise函数添加噪声,并对图像进行卷积运算。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
[h,w]=size(I);
B=ones(3,3)/9;
res1=conv2(G,B);
B=ones(5,5)/25;
res2=conv2(G,B);
B=ones(7,7)/49;
res3=conv2(G,B);
subplot(1,4,1);imshow(G);title('带噪声的原图')
subplot(1,4,2);imshow(res1);title('3*3窗口')
subplot(1,4,3);imshow(res2);title('5*5窗口')
subplot(1,4,4);imshow(res3);title('7*7窗口')
比较了不同窗口大小的均值滤波。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=I;
[h,w]=size(I);
res=zeros(h,w);
for i=2:h-1
for j=2:w-1
gx=-G(i-1,j-1)-2*G(i-1,j)-G(i-1,j+1)+G(i+1,j-1)+2*G(i+1,j)+G(i+1,j+1);
gy=-G(i-1,j-1)-2*G(i,j-1)-G(i+1,j-1)+G(i-1,j+1)+2*G(i,j+1)+G(i+1,j+1);
res(i,j)=sqrt(gx.^2+gy.^2);
end
end
res=res-G;
subplot(1,2,1);imshow(G);
subplot(1,2,2);imshow(res);
disp(res)
同样利用拉普拉斯算子对图像锐化
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
G=imnoise(I,'gaussian');
[h,w]=size(G);
mask=zeros(h,w);
for i=1:h
for j=1:w
if ((h/2-i).^2+(w/2-j).^2>100*100)
mask(i,j)=1;
end
end
end
F=fft2(G); %傅里叶变换
F1=log(abs(F)+1); %取模并进行缩放
Fs=fftshift(F); %将频谱图中零频率成分移动至频谱图中心
Fs=Fs.*mask;
S=log(abs(Fs)+1); %取模并进行缩放
fr=real(ifft2(ifftshift(Fs))); %频率域反变换到空间域,并取实部
ret=im2uint8(mat2gray(fr)); %更改图像类型
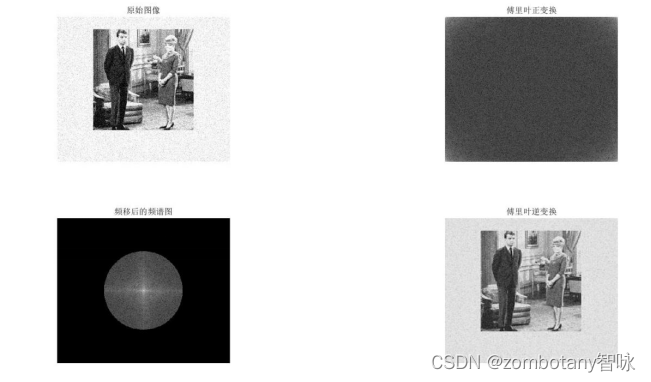
subplot(2,2,1);imshow(G);title('原始图像');
subplot(2,2,2);imshow(F1,[]);title('傅里叶正变换');
subplot(2,2,3);imshow(S,[]);title('频移后的频谱图');
subplot(2,2,4);imshow(ret),title('傅里叶逆变换');
完成了对图像的傅里叶变换,进行平滑操作。
I=imread('couplenew.png');
I=im2gray(I);
I=im2double(I);
[h,w]=size(I);
mask=zeros(h,w);
for i=1:h
for j=1:w
if ((h/2-i).^2+(w/2-j).^2>50*50)
mask(i,j)=1;
end
end
end
F=fft2(I); %傅里叶变换
F1=log(abs(F)+1); %取模并进行缩放
Fs=fftshift(F); %将频谱图中零频率成分移动至频谱图中心
Fs=Fs.*mask;
S=log(abs(Fs)+1); %取模并进行缩放
fr=real(ifft2(ifftshift(Fs))); %频率域反变换到空间域,并取实部
res=I+fr;
subplot(2,2,1);imshow(I);title('原始图像');
subplot(2,2,2);imshow(S,[]);title('频移后的频谱图');
subplot(2,2,3);imshow(fr),title('傅里叶逆变换');
subplot(2,2,4);imshow(res);title('最终结果');
基于傅里叶变换的高通滤波器对图像提取出线条轮廓,将线条轮廓加到原图,对图像进行锐化。
实验结果

成功地实现了对原图添加高斯噪声。对在添加过高斯噪声的图像进行滑动平均值。

成功地对原图添加了高斯噪声。对在添加高斯噪声的图像进行均值滤波,选取的是四邻域。可以看到,在此图像中利用四邻域进行均值滤波的效果不如八邻域。

成功地对原图添加了高斯噪声。对在添加高斯噪声的图像进行中值滤波。在进行中值滤波后,可以明显看到在图像背景的纯白色区域上,噪声被很好地去除了。而在图像前景区域,细节丢失得较为严重。

成功地对原图添加了高斯噪声。对在添加高斯噪声的图像进行均值滤波,使用卷积运算,卷积核为
(
1
9
1
9
1
9
1
9
1
9
1
9
1
9
1
9
1
9
)
\begin{pmatrix}\frac 19&\frac 19&\frac 19\\\frac 19&\frac 19&\frac 19\\\frac 19&\frac 19&\frac 19\end{pmatrix}
919191919191919191
。其实现的效果与图1的均值滤波是类似的。

比较了不同窗口大小的滤波,有33的窗口、55的窗口、7*7的窗口。都是使用均值滤波。

使用具有噪声的图像,将其进行傅里叶正变换后频移,频移后乘以一个掩膜(低通滤波器)。将乘以掩膜后的图像进行傅里叶逆变换,得到处理后的新图像。

利用拉普拉斯算子,对图1的输出图像进行锐化,
P
−
∇
2
P
P-\nabla^2P
P−∇2P,使用掩膜
(
1
1
1
1
−
8
1
1
1
1
)
\begin{pmatrix}1&1&1\\1&-8&1\\1&1&1\end{pmatrix}
1111−81111
,得到锐化后的新图,可以明显看出人物的轮廓像是被描粗了一遍,比平滑后的图像更为明显,人物与原图效果较为接近。但是,背景上加的噪点也被增强了。

利用基于频域的方法进行锐化实验,对图1的输出图像进行锐化。利用高通滤波器,可以看到图8.3中能看到人物的轮廓。将轮廓加到原图后形成了图8.4,人物轮廓明显被增强了。
实验结果分析
实验需要比较分析不同窗口大小的滤波方法的效果。在图5中,对原图添加高斯噪声,并分别选择使用33的窗口、55的窗口、7*7的窗口进行均值滤波的处理。可以明显地看出,更大的窗口能更好地过滤掉背景上随机出现的高斯噪声。但是,也会导致图像变得模糊,丢失了很多边缘、线条上的细节。使用越大的窗口,图像的模糊化也就会越严重。
四、实验小结

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 8
8 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)