STM32CubeMX & Keil——STM32F103C8T6:PWM控制LED灯
通过使用定时器PWM模式对输出的控制可以使LED实现呼吸效果,并控制其时间及亮度。
文章目录
一、定时器与PWM
(一)定时器
1.STM32F103定时器分类及区别
STM32F103一共有8个定时器TIM1~TIM8。STM32的定时器分为基本定时器、通用定时器和高等定时器。
①TIM6、TIM7(基本定时器):基本定时器是只能向上计数的16位定时器,基本定时器只能有定时的功能,没有外部IO口,所以没有捕获和比较通道。
②TIM2、TIM3、TIM4、TIM5(通用定时器):通用定时器是可以向上计数,也可以向下计数的16位定时器。通用定时器可以定时、输出比较、输入捕捉,每个通用定时器具有4个外部IO口。
③TIM1、TIM8(高级定时器):高级定时器是是可以向上计数,也可以向下计数的16位定时器。高等定时器可以定时、输出比较、输入捕捉、还可以输出三相电机互补信号,每个高等定时器有8个外部IO口。
此次主要使用通用定时器,故后续了解以通用定时器为主
1.通用定时器主要功能
通用TIMx (TIM2、TIM3、TIM4和TIM5)定时器功能包括:
● 16位向上、向下、向上/向下自动装载计数器
● 16位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为1~65536之间的任意数值
● 4个独立通道:
─ 输入捕获
─ 输出比较
─ PWM生成(边缘或中间对齐模式)
─ 单脉冲模式输出
● 使用外部信号控制定时器和定时器互连的同步电路
● 如下事件发生时产生中断/DMA:
─ 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
─ 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
─ 输入捕获
─ 输出比较
● 支持针对定位的增量(正交)编码器和霍尔传感器电路
通用定时器计数模式:①向上计数 ②向下计数 ③中心对齐
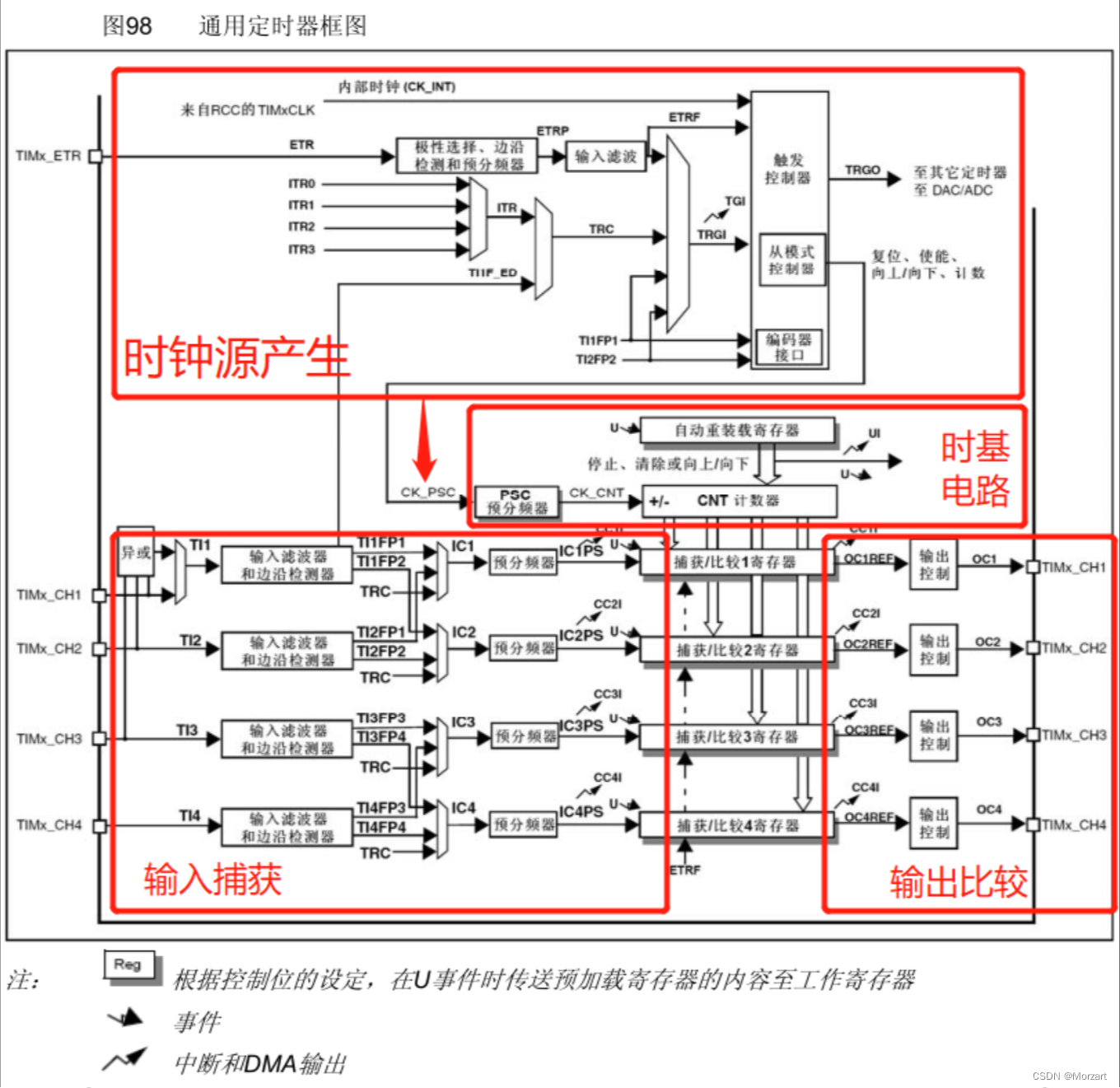
3.通用定时器工作过程

从时钟源产生框可以看到
定时器时钟有四种来源:
● 内部时钟(CK_INT)
● 外部时钟模式1:外部输入脚(TIx) (输入捕获的引脚)
● 外部时钟模式2:外部触发输入(ETR)
● 内部触发输入(ITRx):(定时器级联)使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时器Timer1而作为另一个定时器Timer2的预分频器。
产生CK_PSC时钟,然后在从模式控制器内设置好计数模式(向上向下),再经过预分频器产生CK_CNT,若为CNT计数器向下计数,则当其计数到0时,自动重装载寄存器会重新为CNT计数器装载新值重新递减计数,并产生一个更新事件。
时基单元:
● 计数器寄存器(TIMx_CNT)
● 预分频器寄存器 (TIMx_PSC)
● 自动装载寄存器 (TIMx_ARR)
输入捕获:信号通过捕获通道进入,经滤波,经分频,到捕获比较寄存器。(经输入捕获与输出比较的四个通道其实是一个)
(二)PWM
1.PWM
脉冲宽度调制(Pulse width modulation,PWM)是一种对模拟信号电平进行数字编码的方法。
STM32的每个通用定时器都有独立的4个通道可以用来作为:输入捕获、输出比较、PWM输出、单脉冲模式输出等。
STM32的定时器除了TIM6和TIM7(基本定时器)之外,其他的定时器都可以产生PWM输出。其中,高级定时器TIM1、TIM8可以同时产生7路PWM输出
2.PWM原理
PWM的一个周期
定时器从0开始向上计数
当0-t1段,定时器计数器TIMx_CNT值小于CCRx值,输出低电平
t1-t2段,定时器计数器TIMx_CNT值大于CCRx值,输出高电平
当TIMx_CNT值达到ARR时,定时器溢出,重新向上计数...循环此过程
至此一个PWM周期完成
每个定时器有四个通道,每一个通道都有一个捕获比较寄存器,
将寄存器值和计数器值比较,通过比较结果输出高低电平,便可以实现脉冲宽度调制模式(PWM信号)
向上计数:

假定定时器工作在向上计数 PWM模式:
当 CNT<CCRx 时,输出 0
当 CNT>=CCRx 时输出 1
当 CNT 达到 ARR 值的时候,重新归零,然后重新向上计数,依次循环。
改变 CCRx 的值,就可以改变 PWM 输出的占空比,改变 ARR 的值,就可以改变 PWM 输出的频率。
**具体过程:**若配置脉冲计数器TIMx_CNT为向上计数,而重载寄存器TIMx_ARR配置为N,即TIMx_CNT的当前计数值数值X在TIMxCLK时钟源的驱动下不断累加,当TIMx_CNT的数值X大于N时,会重置TIMx_CNT数值为0重新计数。
而在TIMxCNT计数的同时,TIMxCNT的计数值X会与比较寄存器TIMx_CCR预先存储了的数值A进行比较,当脉冲计数器TIMx_CNT的数值X小于比较寄存器TIMx_CCR的值A时,输出高电平(或低电平),相反地,当脉冲计数器的数值X大于或等于比较寄存器的值A时,输出低电平(或高电平)。
如此循环,得到的输出脉冲周期就为重载寄存器TIMx_ARR存储的数值(N+1)乘以触发脉冲的时钟周期,其脉冲宽度则为比较寄存器TIMx_CCR的值A乘以触发脉冲的时钟周期,即输出PWM的占空比为A/(N+1)。
二、控制LED灯
(一)定时器控制LED灯
1.STM32CubeMX新建文件




定时器溢出时间:

这里我们 arr=4999 psc=6399 Tclk=16Mhz Tout = (5000*6400)/16 us = 2s


2.Keil编写程序
HAL_TIM_Base_Start_IT(&htim2);

void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static unsigned char ledState = 0;
if (htim == (&htim2))
{
if (ledState == 0)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
ledState = !ledState;
}
}

3.运行结果
tim2
(二)定时器PWM模式控制呼吸灯
1.STM32CubeMX新建文件


在 Parameter Settings 页配置预分频系数为 71,计数周期(自动加载值)为 499,定时器溢出频率,即PWM的周期,就是 72MHz/(71+1)/(499+1) = 2kHz
PWM频率:
Fpwm =Tclk / ((arr+1)*(psc+1))(单位:Hz)
arr 是计数器值
psc 是预分频值
占空比:
duty circle = TIM3->CCR1 / arr(单位:%)
TIM3->CCR1 用户设定值
比如 定时器频率Tclk = 72Mhz arr=499 psc=71 那么PWM频率就是720000/500/72= 2000Hz,即2KHz
arr=499,TIM3->CCR1=250 则pwm的占空比为50%
改CCR1可以修改占空比,修改arr可以修改频率



2.Keil编写程序
/* USER CODE BEGIN 1 */
uint16_t pwmVal=0; //PWM占空比
uint8_t dir=1;
/* USER CODE END 1 */
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
/* USER CODE END 2 */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
while (pwmVal< 500)
{
pwmVal++;
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, pwmVal); //修改比较值,修改占空比
// TIM3->CCR1 = pwmVal; 与上方相同
HAL_Delay(1);
}
while (pwmVal)
{
pwmVal--;
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, pwmVal); //修改比较值,修改占空比
// TIM3->CCR1 = pwmVal; 与上方相同
HAL_Delay(1);
}
HAL_Delay(200);
}
/* USER CODE END 3 */
3.运行结果
pwm
(三)定时器采集PWM信号
1.STM32CubeMX新建文件



2.Keil编写程序
在tim.c末尾加上下面函数。
/* USER CODE BEGIN 1 */
#include "usart.h"
uint16_t CCR1, CCR2, CCR3;
uint8_t measure_flag = 0;
// 定时器3 捕获中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
static uint8_t measure_cnt = 1;
// 初始设置的是捕获上升沿
if (htim == &htim3)
{
// 1. 第一次发生中断肯定是上升沿
if (measure_cnt == 1)
{
// 2. 获取此时定时器计时数据
CCR1 = HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_1);
// 3. 将定时器设置为捕获下降沿
__HAL_TIM_SET_CAPTUREPOLARITY(&htim3, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING);
measure_cnt = 2;
}
// 4. 捕获到下降延
else if (measure_cnt == 2)
{
// 5. 获取此时定时器计时数据
CCR2 = HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_1);
// 6. 将定时器重新设置为捕获上升沿
__HAL_TIM_SET_CAPTUREPOLARITY(&htim3, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
measure_cnt = 3;
}
// 7. 再次捕获到上升沿,说明一个周期结束了。
else if (measure_cnt == 3)
{
// 8. 获取此时定时器计时的数据
CCR3 = HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_1);
// 9. 关闭定时器中断。
HAL_TIM_IC_Stop_IT(&htim3, TIM_CHANNEL_1);
measure_cnt = 1;
measure_flag = 1;
}
}
}
// 捕获函数
void capture(void)
{
// diff1:高电平持续时间
// diff2:一个周期的时间
uint16_t diff1 = 0, diff2 = 0;
uint32_t freq; // 频率
uint8_t duty; // 占空比
if (measure_flag)
{
measure_flag = 0;
if (CCR1 < CCR2)
diff1 = CCR2 - CCR1;
else
diff1 = 0xffff + 1 + CCR2 - CCR1; // 设置的最多能数65535,也就是0xffff + 1
if (CCR1 < CCR3)
diff2 = CCR3 - CCR1;
else
diff2 = 0xffff + 1 + CCR3 - CCR1;
// 每秒能数 1000000.一个周期是 diff2。
freq = (72000000 / 72) / diff2;
// 高电平持续时间/低电平持续时间 不让出现小数,所以*100
duty = diff1 * 100 / diff2;
}
printf("freq: %d HZ, duty: %d %% \r\n", freq, duty);
}
/* USER CODE END 1 */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
capture();
// 延时1s
// 在中断回调函数中关掉了,再次开启定时器3捕获中断 重新计算。
HAL_Delay(1000);
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);
}
/* USER CODE END 3 */
3.运行结果

三、总结
通过使用定时器PWM模式对输出的控制可以使LED实现呼吸效果,并控制其时间及亮度。
四、引用
【Z小旋】HAL库 STM32CubeMX教程六----定时器中断
【Z小旋】【STM32】HAL库 STM32CubeMX教程七—PWM输出(呼吸灯)
【Z小旋】【STM32】HAL库 STM32CubeMX教程八—定时器输入捕获
【32Haozi】STM32CubeMX系列06——定时器(定时、PWM、输入捕获)

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)