DQN算法概述及基于Pytorch的DQN迷宫实战代码
深度Q网络将Q学习与深度学习结合,用深度网络来近似动作价值函数,而Q学习则是采用表格存储;深度Q网络采用经验回放的训练方式,从历史数据中随机采样,而Q学习直接采用下一个状态的数据进行学习。
一. DQN算法概述
1.1 算法定义
Q-Learing是在一个表格中存储动作对应的奖励值,即状态-价值函数Q(s,a),这种算法存在很大的局限性。在现实中很多情况下,强化学习任务所面临的状态空间是连续的,存在无穷多个状态,这种情况就不能再使用表格的方式存储价值函数。
于是,诞生了DQN算法,即深度Q网络(Deep Q-Network),是指基于深度学习的Q-Learing算法,用来解决连续状态空间和离散动作空间问题。此时的状态-价值函数变为Q(s,a;w),w是神经网络训练的参数矩阵。
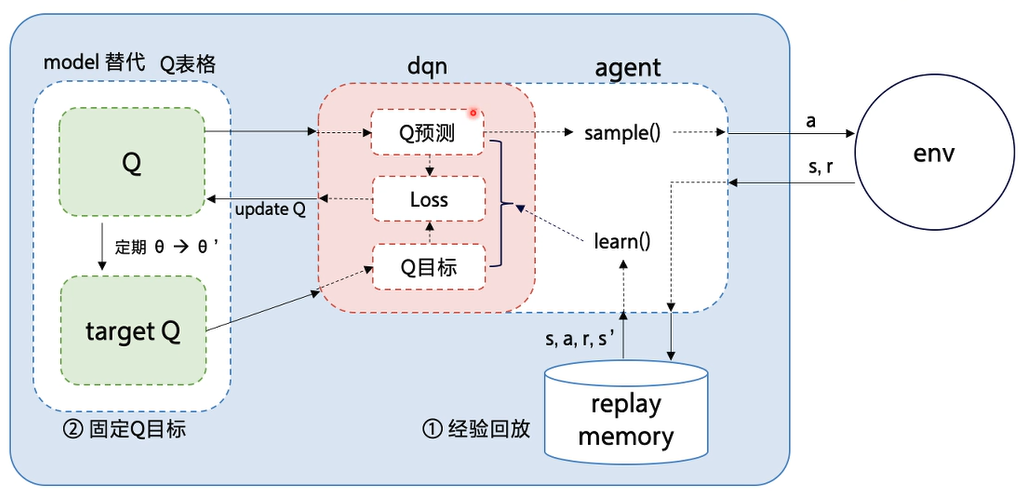
DQN算法有两个非常大的优点,分别是经验回放和双Q表,下面详细讲解。
1.2 经验回放
不使用经验回放
DQN算法的缺点:
- 使用完 ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1)就丢弃,造成经验浪费
- 我们按顺序使用四元组,前后两个
transition四元组相关性很强,这种相关性对学习Q网络是有害的。
经验回放原理
经验回放会构建一个回放缓冲区(replay buffer),存储若干条transition,称为经验区,某一个策略与环境交互,收集很多条transition,放入回放缓冲区,回放缓冲区中的经验transition可能来自不同的策略。回放缓冲区只有在它装满的时候才会把旧的数据丢掉
使用经验回放优点:
- 能够重复使用经验,数据利用率高,对于数据获取困难的情况尤其有用。
- 把序列打散,消除相关性,使得数据满足独立同分布,从而减小参数更新的方差,提高收敛速度。
1.3 目标网络
不使用目标网络
DQN算法的缺点
因为要计算目标网络的目标值target,会使用最大值,这样就会造成计算的结果比真实值要大,用高估的结果再去更新自己,在网络中一次次循环过程,该最大化会越来越大,导致高估。
目标网络原理
使用第二个网络,称为目标网络: Q ( s , a ; w − ) Q(s,a;{w^-}) Q(s,a;w−),网络结构和原来的网络 Q ( s , a ; w ) Q(s,a;{w}) Q(s,a;w)一样,只是参数不同 w − ≠ w {w^-}≠w w−=w,原来的网络称为评估网络
两个网络的作用不一样:
-
评估网络 Q ( s , a ; w ) Q(s,a;{w}) Q(s,a;w)负责控制智能体,收集经验,梯度下降、反向传播
-
目标网络 Q ( s ′ , a ′ ; w − ) Q(s^{\prime},a^{\prime};w^{-}) Q(s′,a′;w−)用于计算下一状态
Q值 -
在更新过程中,只更新评估网络 Q ( s , a ; w ) Q(s,a;{w}) Q(s,a;w)的权重 w w w,目标网络 Q ( s , a ; w − ) Q(s,a;{w^-}) Q(s,a;w−)的权重保持 w − {w^-} w−不变,在更新一定次数后,再将更新过的评估网络的权重复制给目标网络,进行下一批更新,这样目标网络也能得到更新
使用目标网络的优点
利用目标网络可以一定程度避免自举,减缓高估问题;由于在目标网络没有变化的一段时间内回报的目标值是相对固定的,因此目标网络的引入增加了学习的稳定性。
1.4 完整训练过程

- 初始化:初始化深度神经网络 Q Q Q 和目标网络 Q target Q_{\text{target}} Qtarget 的权重 θ \theta θ 和 θ − \theta^- θ−。
- 数据收集: 在环境中与智能体进行交互,执行动作并观察状态转移、奖励和终止状态,将这些经验存储在经验回放缓冲区中。
- 经验回放: 从经验回放缓冲区中随机抽样一批经验,用于更新神经网络。这有助于减少样本之间的相关性,提高训练的稳定性。
- Q值估计: 使用神经网络 Q Q Q 估计当前状态下所有动作的 Q 值。
- 目标计算: 使用目标网络 Q target Q_{\text{target}} Qtarget 估计下一状态的最大 Q 值,即 max a ′ Q target ( s ′ , a ′ ; θ − ) \max_{a'} Q_{\text{target}}(s', a'; \theta^-) maxa′Qtarget(s′,a′;θ−)。
- 更新目标: 使用当前奖励和计算的目标 Q 值更新目标值:
t a r g e t = r + γ ⋅ max a ′ Q t a r g e t ( s ′ , a ′ ; θ − ) \mathrm{target}=r+\gamma\cdot\max_{a^{\prime}}Q_{\mathrm{target}}(s^{\prime},a^{\prime};\theta^{-}) target=r+γ⋅maxa′Qtarget(s′,a′;θ−)
- 计算损失: 使用均方误差损失计算 Q 值估计与目标之间的差异:
L ( θ ) = 1 2 ( target − Q ( s , a ; θ ) ) 2 \mathcal{L}(\theta)=\frac12\left(\text{target}-Q(s,a;\theta)\right)^2 L(θ)=21(target−Q(s,a;θ))2
- 更新网络: 使用梯度下降更新神经网络的权重 θ \theta θ,最小化损失 L ( θ ) \mathcal{L}(\theta) L(θ)。
∇ θ L ( θ ) = − ( t a r g e t − Q ( s , a ; θ ) ) ⋅ ∇ θ Q ( s , a ; θ ) \nabla_\theta\mathcal{L}(\theta)=-\left(\mathrm{target}-Q(s,a;\theta)\right)\cdot\nabla_\theta Q(s,a;\theta) ∇θL(θ)=−(target−Q(s,a;θ))⋅∇θQ(s,a;θ)
θ ← θ − α ⋅ ∇ θ L ( θ ) \theta\leftarrow\theta-\alpha\cdot\nabla_\theta\mathcal{L}(\theta) θ←θ−α⋅∇θL(θ)
-
周期性更新目标网络: 每隔一定的时间步骤,将目标网络的权重 θ − \theta^- θ− 更新为当前网络的权重 θ \theta θ。
-
重复步骤2至9: 迭代地进行数据收集、经验回放、更新网络等步骤。
1.5 总结
深度Q网络将Q学习与深度学习结合,用深度网络来近似动作价值函数,而Q学习则是采用表格存储;深度Q网络采用经验回放的训练方式,从历史数据中随机采样,而Q学习直接采用下一个状态的数据进行学习。
二. 基于Pytorch的DQN迷宫实战
直接上GitHub代码吧,注释全部写在里面了,非常详细:
为了防止有小伙伴打不开,还是这里也放一份吧
RL.py:定义DQN网络
'''
@Author :YZX
@Date :2023/8/7 10:21
@Python-Version :3.8
'''
import torch
# 用于构建神经网络的各种工具和类
import torch.nn as nn
import numpy as np
# 用于执行神经网络中的各种操作,如激活函数、池化、归一化等
import torch.nn.functional as F
import matplotlib.pyplot as plt
# 深度网络,全连接层
class Net(nn.Module):
# 输入状态和动作,当前例子中状态有2个表示为坐标(x,y),动作有4个表示为(上下左右)
def __init__(self, n_states, n_actions):
super(Net, self).__init__()
# 创建一个线性层,2行10列
self.fc1 = nn.Linear(n_states, 10)
# 创建一个线性层,10行4列
self.fc2 = nn.Linear(10, n_actions)
# 随机初始化生成权重,范围是0-0.1
self.fc1.weight.data.normal_(0, 0.1)
self.fc2.weight.data.normal_(0, 0.1)
# 前向传播(用于状态预测动作的值)
def forward(self, state):
# 这里以一个动作为作为观测值进行输入(输入张量)
# 线性变化后输出给10个神经元,格式:(x,x,x,x,x,x,x,x,x,x,x)
state = self.fc1(state)
# 激活函数,将负值设置为零,保持正值不变
state = F.relu(state)
# 经过10个神经元运算过后的数据,线性变化后把每个动作的价值作为输出。
out = self.fc2(state)
return out
# 定义DQN网络class
class DQN:
# n_states 状态空间个数;n_actions 动作空间大小
def __init__(self, n_states, n_actions):
print("<DQN init> n_states=", n_states, "n_actions=", n_actions)
# 建立一个评估网络(即eval表示原来的网络) 和 Q现实网络 (即target表示用来计算Q值的网络)
# DQN有两个net:target net和eval net,具有选动作、存储经验、学习三个基本功能
self.eval_net, self.target_net = Net(n_states, n_actions), Net(n_states, n_actions)
# 损失均方误差损失函数
self.loss = nn.MSELoss()
# 优化器,用于优化评估神经网络更新模型参数(仅优化eval),使损失函数尽量减小
self.optimizer = torch.optim.Adam(self.eval_net.parameters(), lr=0.01)
self.n_actions = n_actions # 状态空间个数
self.n_states = n_states # 动作空间大小
# 使用变量
# 用来记录学习到第几步了
self.learn_step_counter = 0
# 用来记录当前指到数据库的第几个数据了
self.memory_counter = 0
# 创建一个2000行6列的矩阵,即表示可存储2000行经验,每一行6个特征值
# 2*2表示当前状态state(x,y)和下一个状态next_state(x,y) + 1表示选择一个动作 + 1表示一个奖励值
self.memory = np.zeros((2000, 2 * 2 + 1 + 1))
self.cost = [] # 记录损失值
self.steps_of_each_episode = [] # 记录每轮走的步数
# 进行选择动作
# state = [-0.5 -0.5]
def choose_action(self, state, epsilon):
# 扩展一行,因为网络是多维矩阵,输入是至少两维
# torch.FloatTensor(x)先将x转化为浮点数张量
# torch.unsqueeze(input, dim)再将一维的张量转化为二维的,dim=0时数据为行方向扩,dim=1时为列方向扩
# 例如 [1.0, 2.0, 3.0] -> [[1.0, 2.0, 3.0]]
state = torch.unsqueeze(torch.FloatTensor(state), 0)
# 在大部分情况,我们选择 去max-value
if np.random.uniform() < epsilon: # greedy # 随机结果是否大于EPSILON(0.9)
# 获取动作对应的价值
action_value = self.eval_net.forward(state)
# torch.max() 返回输入张量所有元素的最大值,torch.max(input, dim),dim是max函数索引的维度0/1,0是每列的最大值,1是每行的最大值
# torch.max(a, 1)[1] 代表a中每行最大值的索引
# data.numpy()[0] 将Variable转换成tensor
# 哪个神经元值最大,则代表下一个动作
action = torch.max(action_value, 1)[1].data.numpy()[0]
# 在少部分情况,我们选择 随机选择 (变异)
else:
# random.randint(参数1,参数2)函数用于生成参数1和参数2之间的任意整数,参数1 <= n < 参数2
action = np.random.randint(0, self.n_actions)
return action
# 存储经验
# 存储【本次状态,执行的动作,获得的奖励分,完成动作后产生的下一个状态】
def store_transition(self, state, action, reward, next_state):
# 把所有的记忆捆在一起,以 np 类型
# 把 三个矩阵 s ,[a,r] ,s_ 平铺在一行 [a,r] 是因为 他们都是 int 没有 [] 就无法平铺 ,并不代表把他们捆在一起了
# np.hstack()是把矩阵按水平方向堆叠数组构成一个新的数组
transition = np.hstack((state, [action, reward], next_state))
# index 是 这一次录入的数据在 MEMORY_CAPACITY 的哪一个位置
# 如果记忆超过上线,我们重新索引。即覆盖老的记忆。
index = self.memory_counter % 200
self.memory[index, :] = transition # 将transition添加为memory的一行
self.memory_counter += 1
# 从存储学习数据
# target_net是达到次数后更新, eval_net是每次learn就进行更新
def learn(self):
# 更新 target_net,每循环100次更新一次
if self.learn_step_counter % 100 == 0:
# 将评估网络的参数状态复制到目标网络中
# 即将target_net网络变成eval_net网络,实现模型参数的软更新
self.target_net.load_state_dict((self.eval_net.state_dict()))
self.learn_step_counter += 1
# eval_net是 每次 learn 就进行更新
# 从[0,200)中随机抽取16个数据并组成一维数组,该数组表示记忆索引值
sample_index = np.random.choice(200, 16)
# 表示从 self.memory 中选择索引为 sample_index 的行,: 表示选取所有列
# 按照随机获得的索引值获取对应的记忆数据
memory = self.memory[sample_index, :]
# 从记忆当中获取[0,2)列,即第零列和第一列,表示状态特征
state = torch.FloatTensor(memory[:, :2])
# 从记忆中获取[2,3)列,即第二列,表示动作特征
action = torch.LongTensor(memory[:, 2:3])
# 从记忆中获取[3,4)列,即第三列,表示奖励特征
reward = torch.LongTensor(memory[:, 3:4])
# 从记忆中获取[4,5)列,即第四列和第五列,表示下一个状态特征
next_state = torch.FloatTensor(memory[:, 4:6])
# 从原来的网络中获得当前状态的动作对应的预测Q值
# self.eval_net(state)表示输入当前state,通过forward()函数输出状态对应的Q值估计
# .gather(1, action)表示从上述Q值估计的集合中,第一个维度上获取action对应的的Q值
# 将Q值赋值给q_eval,表示所采取动作的预测value
q_eval = self.eval_net(state).gather(1, action)
# 获得下一步状态的Q值
# 把target网络中下一步的状态对应的价值赋值给q_next;此处有时会反向传播更新target,但此处不需更新,故加.detach()
q_next = self.target_net(next_state).detach()
# 计算对于的最大价值
# q_target 实际价值的计算 == 当前价值 + GAMMA(未来价值递减参数) * 未来的价值
# max函数返回索引的最大值
# unsqueeze(1)将上述计算出来的最大 Q 值的张量在第 1 个维度上扩展一个维度,变为一个列向量。
q_target = reward + 0.9 * q_next.max(1)[0].unsqueeze(1)
# 通过预测值与真实值计算损失 q_eval预测值, q_target真实值
loss = self.loss(q_eval, q_target)
# 记录损失值
self.cost.append(loss.detach().numpy())
# 根据误差,去优化我们eval网, 因为这是eval的优化器
# 反向传递误差,进行参数更新
self.optimizer.zero_grad() # 梯度重置
loss.backward() # 反向求导
self.optimizer.step() # 更新模型参数
# 绘制损失图
def plot_cost(self):
# np.arange(3)产生0-2数组
plt.plot(np.arange(len(self.cost)), self.cost)
plt.xlabel("step")
plt.ylabel("cost")
plt.show()
# 绘制每轮需要走几步
def plot_steps_of_each_episode(self):
plt.plot(np.arange(len(self.steps_of_each_episode)), self.steps_of_each_episode)
plt.xlabel("episode")
plt.ylabel("done steps")
plt.show()
MazeEnv.py:创建环境地图
'''
@Author :YZX
@Date :2023/8/7 16:03
@Python-Version :3.8
'''
import tkinter as tk
import numpy as np
UNIT = 40 # pixels 像素
MAZE_H = 4 # grid height y轴格子数
MAZE_W = 4 # grid width x格子数
# 迷宫
class Maze(tk.Tk, object):
def __init__(self):
print("<env init>")
super(Maze, self).__init__()
# 动作空间(定义智能体可选的行为),action=0-3
self.action_space = ['u', 'd', 'l', 'r']
# 使用变量
self.n_actions = len(self.action_space)
# 状态空间,state=0,1
self.n_states = 2
# 配置信息
self.title('maze')
# 设置屏幕大小
self.geometry("160x160")
# 初始化操作
self.__build_maze()
# 渲染画面
def render(self):
# time.sleep(0.1)
self.update()
# 重置环境
def reset(self):
# 智能体回到初始位置
# time.sleep(0.1)
self.update()
self.canvas.delete(self.rect)
origin = np.array([20, 20])
# 智能体位置,前两个左上角坐标(x0,y0),后两个右下角坐标(x1,y1)
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# return observation 状态
# canvas.coords(长方形/椭圆),会得到 【左极值点、上极值点、右极值点、下极值点】这四个点组成的元组,:2表示前2个
return (np.array(self.canvas.coords(self.rect)[:2]) - np.array(self.canvas.coords(self.oval)[:2])) / (MAZE_H * UNIT)
# 智能体向前移动一步:返回next_state,reward,terminal
def step(self, action):
s = self.canvas.coords(self.rect)
base_action = np.array([0, 0])
if action == 0: # up
if s[1] > UNIT:
base_action[1] -= UNIT
elif action == 1: # down
if s[1] < (MAZE_H - 1) * UNIT:
base_action[1] += UNIT
elif action == 2: # right
if s[0] < (MAZE_W - 1) * UNIT:
base_action[0] += UNIT
elif action == 3: # left
if s[0] > UNIT:
base_action[0] -= UNIT
self.canvas.move(self.rect, base_action[0], base_action[1]) # move agent
next_coords = self.canvas.coords(self.rect) # next state
# reward function
if next_coords == self.canvas.coords(self.oval):
reward = 1
print("victory")
done = True
elif next_coords in [self.canvas.coords(self.hell1)]:
reward = -1
print("defeat")
done = True
else:
reward = 0
done = False
s_ = (np.array(next_coords[:2]) - np.array(self.canvas.coords(self.oval)[:2])) / (MAZE_H * UNIT)
return s_, reward, done
def __build_maze(self):
self.canvas = tk.Canvas(self, bg='white',
height=MAZE_H * UNIT,
width=MAZE_W * UNIT)
# create grids
for c in range(0, MAZE_W * UNIT, UNIT):
x0, y0, x1, y1 = c, 0, c, MAZE_H * UNIT
self.canvas.create_line(x0, y0, x1, y1)
for r in range(0, MAZE_H * UNIT, UNIT):
x0, y0, x1, y1 = 0, r, MAZE_W * UNIT, r
self.canvas.create_line(x0, y0, x1, y1)
origin = np.array([20, 20])
hell1_center = origin + np.array([UNIT * 2, UNIT])
# 陷阱
self.hell1 = self.canvas.create_rectangle(
hell1_center[0] - 15, hell1_center[1] - 15,
hell1_center[0] + 15, hell1_center[1] + 15,
fill='black')
oval_center = origin + UNIT * 2
# 出口
self.oval = self.canvas.create_oval(
oval_center[0] - 15, oval_center[1] - 15,
oval_center[0] + 15, oval_center[1] + 15,
fill='yellow')
# 智能体
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
self.canvas.pack()
Run.py:训练主方法
'''
@Author :YZX
@Date :2023/8/7 16:03
@Python-Version :3.8
'''
from MazeEnv import Maze
from RL import DQN
import time
def run_maze():
print("====Game Start====")
step = 0 # 已进行多少步
max_episode = 500 # 总共需要进行多少轮
for episode in range(max_episode):
# 环境和位置重置,但是memory一直保留
state = env.reset()
# 本轮已进行多少步
step_every_episode = 0
# 动态变化随机值
epsilon = episode / max_episode
# 开始实验循环
# 只有env认为 这个实验死了,才会结束循环
while True:
if episode < 10:
time.sleep(0.1)
if episode > 480:
time.sleep(0.2)
# 刷新环境状态,显示新位置
env.render()
# 根据输入的环境特征 s 输出选择动作 a
action = model.choose_action(state, epsilon) # 根据状态选择行为
# 环境根据行为给出下一个状态,奖励,是否结束。
next_state, reward, terminal = env.step(action) # env.step(a) 是执行 a 动作
# 每完成一个动作,记忆存储数据一次
model.store_transition(state, action, reward, next_state) # 模型存储经历
# 按批更新
if step > 200 and step % 5 == 0:
model.learn()
# 状态转变
state = next_state
# 状态是否为终止
if terminal:
print("episode=", episode, end=",") # 第几轮
print("step=", step_every_episode) # 第几步
model.steps_of_each_episode.append(step_every_episode) # 记录每轮走的步数
break
step += 1 # 总步数+1
step_every_episode += 1 # 当前轮的步数+1
# 游戏环境结束
print("====Game Over====")
env.destroy()
if __name__ == "__main__":
env = Maze() # 环境
# 实例化DQN类,也就是实例化这个强化学习网络
model = DQN(n_states=env.n_states,n_actions=env.n_actions)
run_maze() # 训练
env.mainloop() # mainloop()方法允许程序循环执行,并进入等待和处理事件
model.plot_cost() # 画误差曲线
model.plot_steps_of_each_episode() # 画每轮走的步数

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 15
15 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)