直流电机驱动芯片AT8870(兼容DRV8870/A4950)的简单应用
AT8870是一款刷式直流有刷电机驱动器,VM单电源供电,内置电荷泵。兼容DRV8870/A4950电机芯片,适用于打印机、电器、 工业设备以及其他小型机器。内部关断功能包含过流保护,短路保护,欠压锁定和过温保护。两个逻辑输入控制H桥驱动器,该驱动器由四个N-MOS组成,能够以高达3.6A的峰值电流双向控制电机。该芯片利用电流衰减预置最大输出电流, 能够将电流限制在某一已知水平。利用电流衰减模式,
文章目录
一、AT8870是什么?
AT8870是一款刷式直流有刷电机驱动器,VM单电源供电,内置电荷泵。兼容DRV8870/A4950电机芯片,适用于打印机、电器、 工业设备以及其他小型机器。内部关断功能包含过流保护,短路保护,欠压锁定和过温保护。
1、工作原理
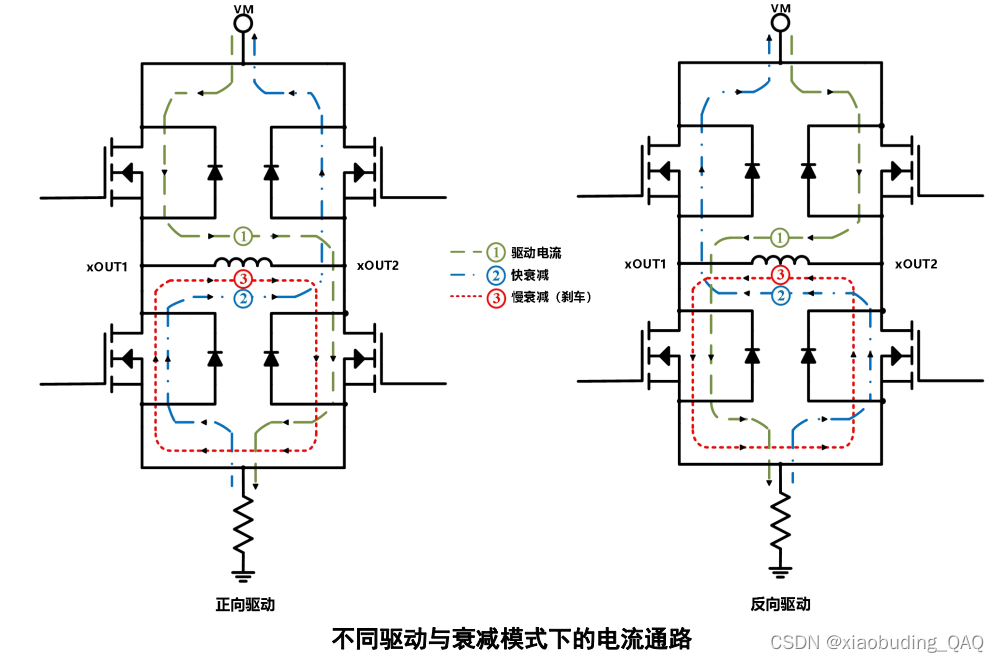
两个逻辑输入控制H桥驱动器,该驱动器由四个N-MOS组成,能够以高达3.6A的峰值电流双向控制电机。该芯片利用电流衰减预置最大输出电流, 能够将电流限制在某一已知水平。利用电流衰减模式,可通过对输入进行脉宽调制(PWM) 来控制电机转速。如果将两个输入均置为低电平,则电机驱动器将进入低功耗休眠模式。

2、引脚说明

1.GND:GND管脚接到电源地
2.PPAD:芯片裸焊盘接到电源
3.IN2:输入管脚2,控制H桥输出状态,内置下拉电阻
4.IN1:输入管脚1,控制H桥输出状态,内置下拉电阻
5.VREF:H桥参考电压输入,来设定驱动峰值电流
6.VM:芯片电源,要做好电源滤波
7.OUT1:H桥输出1
8.ISEN: H桥检流端,接检流电阻到地,若不需要限流,直接接地
9.OUT1:H桥输出2
3、典型应用电路

注意事项:
1.PCB 板上应覆设大块的散热片,地线的连接应有很宽的地线覆线。为了优化电路的电特性和热参数性能,芯 片应该直接紧贴在散热片上。
2.对电极电源 VM,应该连接不小于 47uF 的电解电容对地耦合,电容应尽可能的靠近器件摆放。
3.为了避免因高速 dv/dt 变换引起的电容耦合问题,驱动电路输出端电路覆线应远离逻辑控制输入端的覆线。
4.逻辑控制端的引线应采用低阻抗的走线以降低热阻引起的噪声。
4、H 桥控制逻辑
4.1 电平控制

4.1.1 初始化代码如下(示例):
/*******************************************************************************
* 函数名:Moto_GPIO_Init
* 描述 :电机引脚初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void Moto_GPIO_Init(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启Moto相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd(Moto_GPIO_RCC, ENABLE);
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = AIN1_Pin | AIN2_Pin;
/*调用库函数,初始化GPIO*/
GPIO_Init(Moto_GPIO_Port, &GPIO_InitStructure);
}
4.1.2 电机状态代码如下(示例):
/*******************************************************************************
* 函数名:Moto_Dormancy
* 描述 :电机休眠
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Dormancy(void)
{
Moto_AIN1_LOW();
Moto_AIN2_LOW();//00
}
/*******************************************************************************
* 函数名:Moto_Forword
* 描述 :电机正转
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Forword(void)
{
Moto_AIN1_HIGH();
Moto_AIN2_LOW();//10
}
/*******************************************************************************
* 函数名:Moto_Reversal
* 描述 :电机反转
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Reversal(void)
{
Moto_AIN1_LOW();
Moto_AIN2_HIGH();//01
}
/*******************************************************************************
* 函数名:Moto_Brake
* 描述 :电机刹车
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Brake(void)
{
Moto_AIN1_HIGH();
Moto_AIN2_HIGH();//11
}
4.1.3 电机测试代码如下(示例):
/*******************************************************************************
* 函数名:Moto_Test1
* 描述 :电机测试1(非调速版本)
* 输入 :void
* 输出 :void
* 调用 :100ms
* 备注 :先正转再反转(要用PWM才能调速)
*******************************************************************************/
void Moto_Test1(void)
{
if (moto_dir == 0) // 正转
{
moto_count++;
if (moto_count > 100)
{
moto_count = 0;
moto_dir = 1;
}
Moto_Forword();
printf("Moto_Forword\r\n");
}
else // 反转
{
moto_count++;
if (moto_count > 100)
{
moto_count = 0;
moto_dir = 0;
}
Moto_Reversal();
printf("Moto_Reversal\r\n");
}
}
4.2 PWM控制

4.2.1 初始化代码如下(示例):
/*******************************************************************************
* 函数名:User_TIM4_Init
* 描述 :定时器4初始化
* 输入 :void
* 输出 :void
* 调用 :初始化
* 备注 :
*******************************************************************************/
void User_TIM4_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//开启TIM4的时钟
RCC_APB2PeriphClockCmd(Moto_GPIO_RCC, ENABLE);//开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用
GPIO_InitStructure.GPIO_Pin = AIN1_Pin | AIN2_Pin;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Moto_GPIO_Port, &GPIO_InitStructure);
/*配置时钟源*/
TIM_InternalClockConfig(TIM4); //选择TIM4为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM4的输出比较通道3
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM4的输出比较通道4
/*TIM使能*/
TIM_Cmd(TIM4, ENABLE); //使能TIM4,定时器开始运行
}
4.2.2 电机状态代码如下(示例):
/*******************************************************************************
* 函数名:Moto_Fast_PWMForword
* 描述 :电机正转PWM,快衰减
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Fast_PWMForword(uint8_t speed)
{
Moto_PWM1_SetCompare(speed);//PWM
Moto_PWM2_SetCompare(0);//0
}
/*******************************************************************************
* 函数名:Moto_Slow_PWMForword
* 描述 :电机正转PWM,慢衰减
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Slow_PWMForword(uint8_t speed)
{
Moto_PWM1_SetCompare(100);//1
Moto_PWM2_SetCompare(speed);//PWM
}
/*******************************************************************************
* 函数名:Moto_Fast_PWMReversal
* 描述 :电机反转PWM,快衰减
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Fast_PWMReversal(uint8_t speed)
{
Moto_PWM1_SetCompare(0);//0
Moto_PWM2_SetCompare(speed);//PWM
}
/*******************************************************************************
* 函数名:Moto_Slow_PWMReversal
* 描述 :电机反转PWM,慢衰减
* 输入 :void
* 输出 :void
* 调用 :内部调用
* 备注 :
*******************************************************************************/
void Moto_Slow_PWMReversal(uint8_t speed)
{
Moto_PWM1_SetCompare(speed);//PWM
Moto_PWM2_SetCompare(100);//1
}
4.2.3 电机测试代码如下(示例):
/*******************************************************************************
* 函数名:Moto_Test2
* 描述 :电机测试2(调速版本)
* 输入 :void
* 输出 :void
* 调用 :100ms
* 备注 :先电机正转PWM,快衰减再电机反转PWM,快衰减
*******************************************************************************/
void Moto_Test2(void)
{
if(moto_dir == 0)//电机正转PWM,快衰减
{
moto_count++;
if(moto_count > 100)
{
moto_count = 0;
moto_dir = 1;
printf("Moto_Fast_PWMReversal\r\n");
}
Moto_Fast_PWMForword(moto_speed);
}
else //电机反转PWM,快衰减
{
moto_count++;
if(moto_count > 100)
{
moto_count = 0;
moto_dir = 0;
printf("Moto_Fast_PWMForword\r\n");
}
Moto_Fast_PWMReversal(moto_speed);
}
}
二、总结
今天主要讲了AT8870电机驱动的简单应用,在实际应用中需要更精细的控制,就需要用到PID算法来对位置/速度/电流等控制,对电机驱动兴趣的可以下载附件参考,感谢你的观看,谢谢!


开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 36
36 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)