基于kinect的人体动作识别系统(算法和代码都放出)
基于kinect的人体动作识别系统(算法和代码都放出)首先声明一下,本系统所使用的开发环境版本是计算机系统Windows10、VisualStudio2013、Opencv3.0和KinectSDKv2.0。这些都可以在百度上找到,download下来安装一下即可。关于kinect的环境配置以及骨骼数据获取等等等问题,参考我之前kinect系列的博客(http://blog.cs
基于kinect的人体动作识别系统(算法和代码都放出)
首先声明一下,本系统所使用的开发环境版本是计算机系统Windows 10、Visual Studio 2013、Opencv3.0和Kinect SDK v2.0。这些都可以在百度上找到,download下来安装一下即可。
关于kinect的环境配置以及骨骼数据获取等等等问题,参考我之前kinect系列的博客(第三篇 KinectV2骨骼获取原理和获取方法及源代码_kinect v2获取骨架数据-CSDN博客)。
完整工程代码在GitHub(https://github.com/baolinhu/kinect-gesture),想看的可以去看看,顺便点个star~~~
无法访问github的可以使用科学上网工具,http://cp.dawangidc.com/aff.php?aff=508
一、人体姿态特征提取
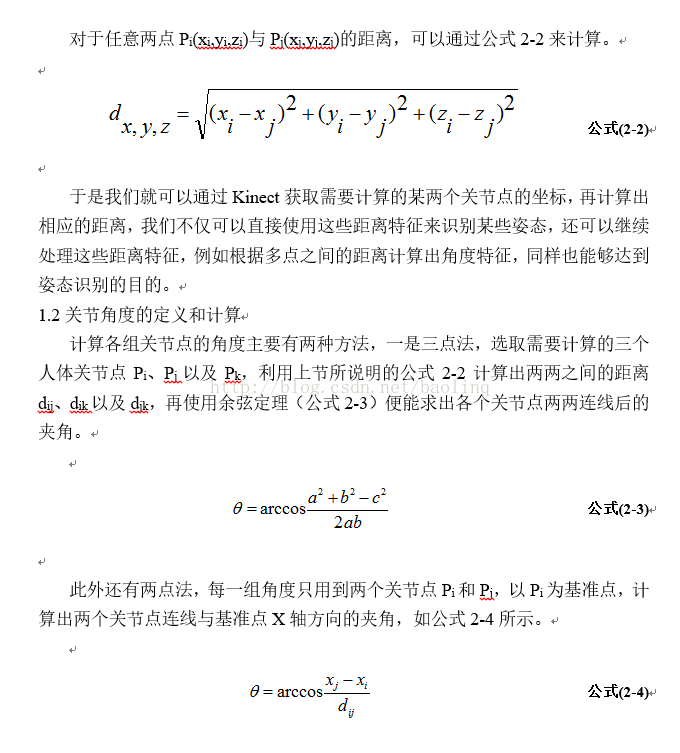
1.1关节点相对距离系数计算
由于CSDN的编辑页面对公式的支持太不友好了,我只能使用截图了~~

二、人体动作识别的核心算法
根据已获取到的数据源即可对人体动作进行准确识别。这里我使用比较简单但通用的方法,因为kinect可以直接获取人体的三维坐标,根据人体三维坐标的相对位置关系即可对人体的动作和形态进行准确判断和识别。
下面给出算法流程图。因为懒的去画图,直接用手在纸上画的,字chou图也chou,将就着看看吧~~~
图5-1 系统的核心算法流程图

由流程图可知,人体动作别系统在工作时,主要通过人体的骨骼数据来判断是何种行为,利用骨骼点之间的距离关系和夹角关系。本系统只考虑单个目标人体的单种简单行为,不考虑多目标多动作的情况。首先,判断重心的位置变化,一般就是上下左右变化,如果重心有左移,且距离超过给定阈值,就认为目标人体有左移行为,同样的,如果重心有右移,且距离超过给定阈值,就认为目标人体有右移行为。如果重心没有移动,那就肯定没有左移和右移行为。对于下蹲的检测,从定义的角度看,就是腿部有弯曲。本系统也是主要检测腿部是否有弯曲到一定程度,判断臀部、膝盖、脚踝三点连线的夹角是否小于160度(经验值),如果小于,那就是有下蹲,因为正常情况下,三点之间夹角近似为180度。或者检测臀部、膝盖、脚踝三点之间的2段距离之和大于臀部到膝盖之间的直接距离的1.15倍,也认为是有下蹲行为。最后是上绷的检测,上蹦从定义看,就是双脚离开地面,人体有向上的一小段运动。本系统是通过检测双脚是否离开地面超过给定阈值,或者人体重心相比正常站立时上升距离超过给定阈值,就认为有上蹦行为。所有的动作识别都是实时的,结果都会实时输出。

部分核心代码:完整代码文末会给出完整下载链接
//检测函数:为了检测准确请尽量站在合适位置,让Kinect获取全身骨骼点
void CBodyBasics::Detection(Joint joints[])
{
static double tin, tout;
//double tframe;
CMFC_DEMO01Dlg *pDlg0 = CMFC_DEMO01Dlg::s_pDlg; //实例化一个CMFC_DEMO01Dlg 指针
//计算每相邻10帧的高度差,从而计算速度,1,11,12,22
//大概30帧每秒,那么10帧就是0.33秒,
if (framenumber % 11 == 1) //framenumber是帧序列号,自己定义的
{
tin = static_cast<double>(GetTickCount());
//cout << "tin是" << tin << endl;
spinemid_xin = joints[JointType_SpineMid].Position.X;
spinemid_yin = joints[JointType_SpineMid].Position.Y;
rightfoot_yin = joints[JointType_KneeRight].Position.Y;
leftfoot_yin = joints[JointType_KneeLeft].Position.Y;
spinebase_yin = joints[JointType_SpineBase].Position.Y;
rightAnkle_yin = joints[JointType_AnkleRight].Position.Y;
base_foot_in = spinebase_yin - rightAnkle_yin;
//cout << "basefootin为:" << base_foot_in << endl;
//cout << "当前SpineHeightin的高度为" << SpineHeightin << " m"<<endl;
}
if (!(framenumber % 11))
{
tout = static_cast<double>(GetTickCount());
//cout << frmamenumber << endl;
//cout <<"tout是"<< tout << endl;
//cout << "每10帧计算一次下降的速度" << endl;
spinemid_xout = joints[JointType_SpineMid].Position.X;
spinemid_yout = joints[JointType_SpineMid].Position.Y;
rightfoot_yout = joints[JointType_KneeRight].Position.Y;
leftfoot_yout = joints[JointType_KneeLeft].Position.Y;
rightAnkle_yout = joints[JointType_AnkleRight].Position.Y;
spinebase_yout = joints[JointType_SpineBase].Position.Y;
base_foot_out = spinebase_yout - rightAnkle_yout;
//cout << "当前帧号为:" << base_foot_out << endl;
// cout << "***********************************" << endl;
// cout << "当前SpineHeightin的高度为" << SpineHeightin << " m" << endl;
//tframe = (tout - tin) / getTickFrequency();
// cout <<tframe << endl;
// cout << getTickFrequency()<<endl;
//cout << "当前SpineHeightout的高度为" << SpineHeightout << " m" << endl;
//SpineV = (SpineHeightin - SpineHeightout) / tframe;
spinemid_x = spinemid_xout - spinemid_xin;
spinemid_y = spinemid_yout - spinemid_yin;
rightfoot_y = rightfoot_yout - rightfoot_yin;
leftfoot_y = leftfoot_yout - leftfoot_yin;
base_foot = base_foot_out - base_foot_in;
//cout << "Spinemid_x是多少??" << base_foot << endl;
//cout << "Spinemid_y是多少??" << spinemid_y << endl;
//上蹦检测:双脚离地面超过0.15米,或者人体重心相对正常站立时上升超过0.15米
if ((leftfoot_y>0.15&&rightfoot_y > 0.15) || (spinetemp>0.01&&spinetemp + 0.15<joints[JointType_SpineMid].Position.Y)) //y轴向上为正
{
string str1 = "上蹦\r\n " ; //这里面是为了把数据输出到mfc显示框,你可以不用管,下同
CString cstr = str1.c_str(); //删掉编辑框中的内容,方法一:GetDlgItem(IDC_EDIT1)->SetWindowText("");
//方法二:给编辑框定义一个控件变量,m_edit1.SetWindowText("");
pDlg0->m_outedit.SetSel(-1);
pDlg0->m_outedit.ReplaceSel(cstr);
cout << str1; //控制台输出显示,下同。为了方便调试,这里同时会显示到控制台
}
//else if (base_foot < -thresh_y) //下蹲检测:主要检测腿部有弯曲即可,臀部与脚踝之间的距离减少超过0.2米
else if (Distance(joints[JointType_HipLeft], joints[JointType_AnkleLeft])*(1 + 0.15) < Distance(joints[JointType_HipLeft], joints[JointType_KneeLeft]) + Distance(joints[JointType_KneeLeft], joints[JointType_AnkleLeft]))
{
flag++;
if (flag == 2) //下蹲状态需要时间,这里给了一下标志位,类似计时器,连续监测到两次才算下蹲,避免重复出现结果
{
flag = 0;
//下蹲其他检测方法,还可以检测hipleft、knee、ankle三点之间的夹角关系和距离关系,夹角小于160度(可以多试几
//个值),说明有下蹲,或者两边之和大于第三边的1.15倍左右,也可以说明有下蹲
string str1 = "下蹲\r\n ";
CString cstr = str1.c_str();
pDlg0->m_outedit.SetSel(-1);
pDlg0->m_outedit.ReplaceSel(cstr);
cout << str1;
}
}
//x轴方向向右为正
//重心向右移动超过阈值thresh_x,则判断右移
if (spinemid_x > thresh_x)
{
string str1 = "右移\r\n ";
CString cstr = str1.c_str();
pDlg0->m_outedit.SetSel(-1);
pDlg0->m_outedit.ReplaceSel(cstr);
cout << str1;
}
else if (spinemid_x < -thresh_x) 重心向左移动超过阈值thresh_x,则判断左移
{
string str1 = "左移\r\n ";
CString cstr = str1.c_str();
pDlg0->m_outedit.SetSel(-1);
pDlg0->m_outedit.ReplaceSel(cstr);
cout << str1;
}
}
//根据勾股定理,计算HipLeft、AnkleLeft、AnkleLeft之间的距离关系。0.15是一个估计值,可根据实际情况略微调整
/* if (Distance(joints[JointType_HipLeft], joints[JointType_AnkleLeft])*(1 + 0.15) < Distance(joints[JointType_HipLeft], joints[JointType_KneeLeft]) + Distance(joints[JointType_KneeLeft], joints[JointType_AnkleLeft]))
{
flag++;
if (flag == 2) //下蹲状态需要时间,这里给了一下标志位,类似计时器,连续监测到两次才算下蹲,避免重复出现结果
{
flag = 0;
cout << "下蹲1111111\n";
}
}
*/
}总结:虽然整个对人体动作识别系统很简单,但是还是有一定的引导和启发作用的,对人体动作的准确识别已被广泛地应用在人机交互[1]、智能监控[2]、机器人自主导航[3]、动画游戏和医疗康复等领域中,有很大的意义,有兴趣的同学可以继续做更加深入的研究。
参考文献:
[15] 余涛.Kinect应用开发实战:用最自然的方式与机器人对话.北京:机械工业出版社,2012.1-337.
[16] 樊景超,周国民.基于Kinect骨骼追踪技术的手势识别研究.安徽农业科学,2014,42(11):3444-3446.
[17] 谢亮,廖宏建,杨玉宝.基于Kinect 的姿态识别与应用研究.计算机技术与发展,2005,23(5):258-260.
[18] 战荫伟,于芝枝,蔡俊.基于Kinect 角度测量的姿势识别算法.传感器与微系统,2014,33(7):129-132.
[19] 刘开余, 夏斌. 基于Kinect的实时人体姿势识别[J]. 电子设计工程, 2014(19):31-34.
系列博客网址:
第一篇 基于Kinect v2的跌到检测系统的概述
第一篇 基于Kinect v2的跌到检测系统的概述_基于kinect v2的姿态和跌倒检测-CSDN博客
第二篇 KinectV2结合opencv入门开发以及一些相关的学习资料
第二篇 KinectV2结合opencv入门开发以及一些相关的学习资料_kinectv2+opencv获取红外图-CSDN博客
第三篇 KinectV2骨骼获取原理和获取方法及源代码
第三篇 KinectV2骨骼获取原理和获取方法及源代码_kinect v2获取骨架数据-CSDN博客
第四章 利用Kinect抠图和自动拍照程序
第五章 跌倒检测算法剖析
第五章 跌倒检测算法剖析(含跌到检测源码)_人体跌倒计算公式-CSDN博客
第六章 KinectV2结合MFC显示和处理图像数据(上)
第六章 KinectV2结合MFC显示和处理图像数据(上)_mfc kinect-CSDN博客
第七章 KinectV2结合MFC显示和处理图像数据(下)
第七章 KinectV2结合MFC显示和处理图像数据(下)_mfc hsv-CSDN博客
第八章 基于Kinectv2跌倒检测系统的总结
http://blog.csdn.net/baolinq/article/details/52440447
好了,本篇文章到这里就要结束了。本篇文章主要介绍了借助kinect来准确识别人体动作,大家可以发挥自己的想象力,自定义更多的动作,应用在更广泛的场景。下面附上更加完整和规范的源码下载网址,1积分下载(因为貌似不能0积分上传资源了,尴尬~)。
http://download.csdn.net/download/baolinq/10003879
下一篇见。
超跑开起来~~


开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 65
65 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)