
【FOC】HALL同步电角度测试
ST FOC官方库说明在使用HALL需要位置传感器时,需要测量同步电角度(也就是公司代码中的角度偏置值)。这个数据是根据不同电机的特性进行测试的。公司的做法是测试在当前角度范围中,寻找一个最大出力点(同等负载下,相电流最小或功率最小)。ST FOC库中规定,电机 Hall A 的上升沿到电机 A 相反电动势最高点的延迟角度为同步电角度。作为刚入行的小白,看到这脑海中涌现了一连串的问题?H...
·
ST FOC官方库说明
在使用HALL需要位置传感器时,需要测量同步电角度(也就是公司代码中的角度偏置值)。这个数据是根据不同电机的特性进行测试的。
公司的做法是测试在当前角度范围中,寻找一个最大出力点(同等负载下,相电流最小或功率最小)。
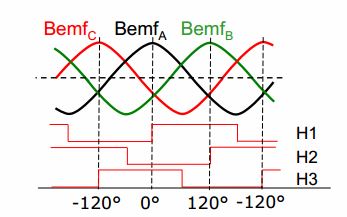
ST FOC库中规定,电机 Hall A 的上升沿到电机 A 相反电动势最高点的延迟角度为同步电角度。
作为刚入行的小白,看到这脑海中涌现了一连串的问题?
HALL A怎么判断?
A相是哪相?
角度基准在哪里?
怎么测电机反电动势?
…
- HALL 信号分析
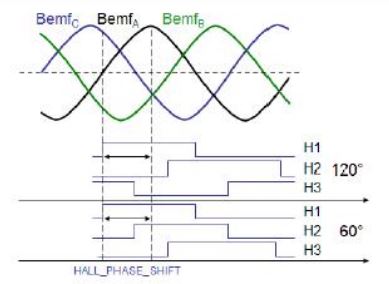
霍尔传感器根据转子磁性输出数字量,一个霍尔传感器在一个电周期内输出两种状态,间隔分布的三个霍尔就会形成6中状态,对应SVPWM中6个扇区,以此可以判断转子所在扇区。其一般有两种放置方式——120度和60度。

120度

60度
上图分别是120度和60度分布下的HALL信号图,其中一般多用120度分布。
霍尔信号把一个电周期分为6部分,那又如何判断哪个扇区是起始扇区,哪个扇区是结束扇区呢?ST规定电机**正转(速度为正)**时的时序如下
代码中扇区的计算如下
HallY = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_15);
HallG = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3);
HallB = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10);
ReadValue = HallY + (HallG << 1) + (HallB << 2);
也就是说在120度分布下,当电机速度为正时,霍尔信号必须是5-1-3-2-6-4的顺序。那么HA就对应的是HallY ,H2就对应的是HallG ,H3就对应的是HallB 。

-
电机三相反电动势

其中TIM1_CH1、TIM1_CH2、TIM1_CH3对应电机A、B、C相。至此相线和霍尔序列已经确认,接下来开始测量同步电角度。 -
同步电角度测量
- 按假定的方向手懂转动转子,并观察引起的三相电动机的 B-emf。为此,如果真正的中性点不可用,可通过三个电阻器的方法重新确立中性点。

2) 按照正序将电机连接到硬件。 让 “A 相 “, ” B 相 “和” C 相 “成为由 TIM1_CH1,TIM1_CH2 和 TIM1_CH3 各自驱动的电机
3) 按假定的方向手懂转动转子,观察三个霍尔传感器输出(H1,H2 和 H3) - 测量在 A 相产生的最大 B-emf 和 H1 的第一个上升沿之间的电角度延迟。
-90度
0度
判断步骤:电机与逆变器相连,根据逆变器硬件结构确定ABC相——用示波器观察A相反电动势和三个霍尔信号——确定一个电周期,根据信号分布确定HA、HB、HC——测量HA上升沿到A相反电动势最高出的延迟角度。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)