天球坐标系及其与地球坐标系之间的转换
天文学研究天体间的几何学和动力学问题,天体如恒星是不随地球自转而运动的。只有不随地球自转运动、在空中固定的坐标系,诸多天体(如恒星的坐标可以保持不变。在空中固定的坐标系便于研究天体间几何学问题。此外不随地球运动的天球坐标系可以作惯性坐标系,这对研究天体动力学问题也是十分重要的条件。卫星也是不随地球运动天体,适合采用天球坐标系研究其运动问题。在空间静止或做匀速直线运动的坐标系统称为惯性坐标系,也称为
·
目录
7.3.2基于 CIO 的 GCRS 与 ITRS 转换方法
一、天球坐标系概述
- 天文学研究天体间的几何学和动力学问题,天体(如恒星)是不随地球自转而运动的。
- 只有不随地球自转运动、在空中固定的坐标系,诸多天体(如恒星)的坐标可以保持不变。
- 在空中固定的坐标系便于研究天体间几何学问题。
- 此外不随地球运动的天球坐标系可以作惯性坐标系,这对研究天体动力学问题也是十分重要的条件。卫星也是不随地球运动天体,适合采用天球坐标系研究其运动问题。
-
在空间静止或做匀速直线运动的坐标系统称为惯性坐标系,也称为空固坐标系或天球坐标系。牛顿万有引力定律建立在惯性坐标系中,因而惯性坐标系对于描述地球引力作用下的天体和人造卫星的运动状态相当方便。
-
天球坐标系是一种惯性坐标系
二、天球的基本概念
- 就像定义地球坐标系需要将地球椭球作为基准一样,在定义天球坐标系时,同样要找一个基准。这个基准就是天球。天球是指以地球质心为中心,任意长度为半径的一个假想的球体。
- 有关天球的主要概念如下:
-
(1) 天极。地球自转轴的延伸直线为天轴,天轴与天球的交点 P N 、 P S 称为天极,其中 P N 称为北天极, P S 称为南天极。
-
(2) 天球赤道。通过地球质心与天轴垂直的 平面,称为天球赤道面。这时天球赤道面与地球赤道面相重。该赤道面与天球相交的大圆称为天球赤道。
-
(3) 天球子午圈。包含天轴并通过任一点的平面,称为天球子午面,而天球子午面与天球相交的大圆称为天球子午圈。
-
(4) 黄道。地球绕太阳公转的轨道平面与地球表面相交的大圆称为黄道,黄道面与赤道面相交的夹角,称为黄赤交角,约为 23.5° 。通过天球中心,且垂直于黄道面的直线与天球的交点,称为黄极。其中靠近北天极的交点 Π N 称为北黄极,靠近南天极的交点 Π S 称为南黄极。
- (5)春分点。黄道与赤道的两个交点称为春分点和秋分点。其中,太阳在黄道上从南半
球向北半球运动时,黄道与天球赤道的交点称为春分点,用 E 表示。
- 因为从地心到春分点的方向并不随着地球的自转或公转等发生变化,所以春分点称为
天文学和大地测量学中的一个重要空间基准点。天文学中和在研究卫星运动时,春分点和天球赤道面是建立参考系的重要基准点和基准面。
-

三、天球坐标系
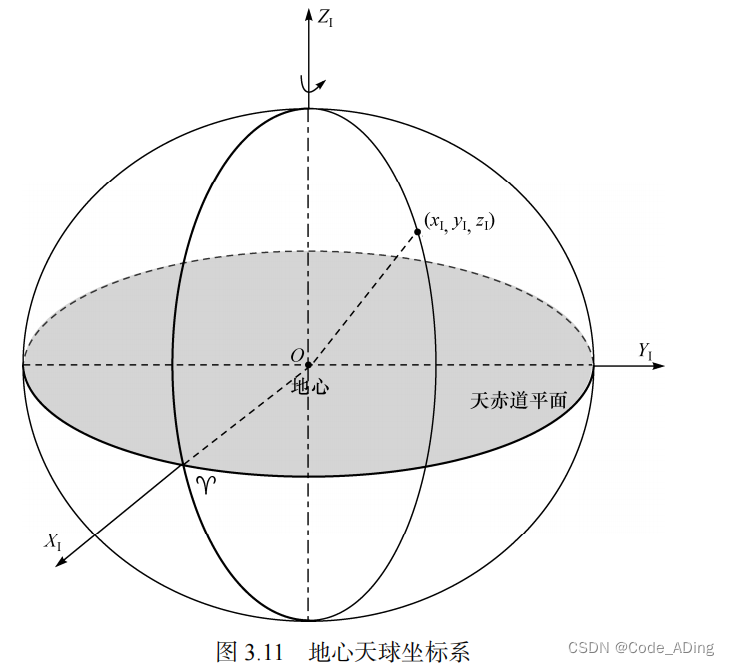
- 下图是一个坐标中心在地球质心的地心天球坐标系:
- 该坐标系的 Z 轴与地球自转轴重合并指向北天极,
- X 轴指向春分点,
- Y 轴垂直于 XOZ 平面并与 X、Z 轴构成右手直角坐标系。

-
由于天球坐标系和地球的自转无关,所以描述天体和人造地球卫星的位置与运动状态是很方便的。
-
特别是当选定的基本参考点北天极和春分点固定时,该天球坐标系基本上是一个惯性系,非常适于研究卫星运动。
四、岁差与章动
-
天球坐标系是以天轴为基准轴、以春分点为基准点而定义的坐标系。这样建立坐标系统是基于假设地球为均质的球体,并且没有其他天体摄动力影响的理想情况,即假定地球的自转轴在空间的方向是固定的,因而春分点在天球上的位置保持不变。
-
但是,实际上地球的形体接近于一个赤道隆起的椭球体,因此,在日月引力和其他天体引 力对地球隆起部分的作用下,地球在绕太阳运行时,自转轴的方向不再保持不变,从而使 春分点在黄道上产生缓慢的西移。这种现象在天文学中称为岁差。
- 在岁差的影响下,地球自转轴在空间绕北黄极产生缓慢的旋转(从北天极上方观察为顺时针方向,以下同),因而使北天极以同样的方式在天球上绕北黄极产生旋转。
-
岁差按照其产生的原因可分为赤道岁差 ( 原来称为日、月岁差 ) 和黄道岁差 ( 原来称为行星岁差) 。日、月对地球非球形 ( 主要是赤道隆起部分 ) 的引力作用,使地球像陀螺那样,自转轴在空间摆动。从北黄极上方观察,地球北极在空间的运动轨迹是一个近似于以北黄极为中心的顺时针方向旋转的圆周,圆周半径等于黄赤交角ε ,旋转周期大约为 25800 年,运动速度为 50.39 " /a 或 0.0139972°/a 。黄道岁差是地球和月球受到除了日月引力,太阳系中的其他行星产生万有引力,影响地月系质心绕日公转的轨道平面,黄道面产生变化,发生的春分点移动。黄道岁差造成春分点在天球赤道上每年约东移 0.1 " ,还会使黄赤交角 ε 变化。 岁差示意图见图 3.12 。
-

-
月球和太阳与地球的相对位置在不断变化,同时各行星相对于地球的位置也在不断变化,引力不断变化,从而使黄道面产生周期性变化。这使春分点、北天极、黄赤交角等在黄道总岁差的基础上产生额外的周期性摆动,我们将这种周期性摆动称为章动。
-
章动周期大约为 18.6 年,转动的轨迹接近于小椭圆,椭圆长半轴约等于9.2′′ 。在岁差和章动的共同作用下,真北天极将沿着波浪形的曲线运动,如图 3.13 所示。
-

-
-
我们通常
-
把仅有岁差影响的北天极称为瞬时平北天极,而与其相应的天球赤道和春分点,称为瞬时天球平赤道和瞬时平春分点;
-
把观测时的北天极称为瞬时真北天极,而与之相应的天球赤道和春分点称为瞬时真天球赤道和瞬时真春分点。
-
注:观测时刻(即在地面上用接收机观测的时刻)会同时又岁差和章动的影响。
-
五、协议天球坐标系
-
以瞬时真北天极和瞬时真春分点为基准建立的天球坐标系,称为瞬时真天球坐标系
-
以瞬时平北天极和瞬时平春分点为基准的天球坐标系,称为瞬时平天球坐标系
-
在岁差和章动的影响下,瞬时天球坐标系的坐标轴指向在不断地变化。在这种非惯性坐标系统中,不能直接根据牛顿力学定律来研究卫星的运动规律。
-
在实际操作中,要建立一个严格意义上的惯性坐标系相当困难,通常根据统一的约定 建立近似的惯性坐标系,称为协议惯性坐标系。
- 国际大地测量协会和国际天文学联合会决定,从 1984 年 1 月 1 日起采用以 J2000.0 历元(2000 年 1 月 1 日 11:58:56 UTC,UTC 即协调世界时,即我们日常使用的时间)的平赤道和平春分点为依据的协议天球坐标系(CIS)。
- 该协议天球坐标系的 X 轴指向 J2000.0 历元的平春分点,Z 轴与 J2000.0 历元的平赤道面垂直,称为 J2000.0协议天球坐标系或 J2000.0 地心惯性坐标系。有时为了简便,也写成 J2000 协议天球坐标系、J2000 地心惯性坐标系。

六、协议天球坐标系与协议地球坐标系的转换
-
卫星运动方程解算和卫星位置计算一般在协议天球坐标系中进行;//但在卫星位置计算中不需要这么多次的转换
-
导航定位得到的用户位置是在协议地球坐标系中表示。 因此,在实际工作中常常需要进行这两种坐标系间的坐标转换。
-
由这两种坐标系的定义可得,其坐标系的原点均为地球质心,但其坐标轴的指向不同。 两坐标转换的基本方法是:
-
首先,将协议天球坐标系转换成瞬时天球坐标系;
-
然后,将瞬时天球坐标系转换为瞬时地球坐标系;
-
最后,将瞬时地球坐标系转换为协议地球坐标系。
-
转换过程中涉及的中间坐标系及其转换流程:
-
-
协议天球坐标系与协议地球坐标系的转换关系为:
-

-

-

6.1协议天球坐标系与瞬时平天球坐标系的转换
- 协议天球坐标系与瞬时平天球坐标系的差别是岁差的影响,因此,两者的转换通过岁差矩阵实现。岁差矩阵计算模型为
-
其中, RY 、RZ 分别表示绕 Y 轴、Z 轴旋转的坐标变换矩阵; ζ A 、 θ A 、 Z A 为赤道岁差角, 根据 IERS 规范其计算式分别为
-
-
其中, T 是从 J2000.0 历元起算的归化时间,即
-
-
其中, JD(TDB) 表示由质心动力学时(TDB) 表示的儒略日。


- 为了计算 RY 、RZ ,这里统一进行说明。绕 X 轴、Y 轴、Z 轴旋转的坐标变换矩阵分别 为 RX 、 RY 、 RZ 。以旋转角度θ 为例,说明三个旋转矩阵的计算方法。
- (1) 绕 X 轴旋转θ 的变换矩阵为
-
(2) 绕 Y 轴旋转 θ 的变换矩阵为
-
-
(3) 绕 Z 轴旋转 θ 的变换矩阵为
-
-
由于矩阵 R Y 与矩阵 R X 、 R Z 中正余弦函数符号略有区别,为了避免在应用中出错,在正余弦函数前均标示了“ + ”或“ − ”号加以强调。
- (1) 绕 X 轴旋转θ 的变换矩阵为



6.2瞬时平天球坐标系与瞬时真天球坐标系的转换
- 瞬时平天球坐标系与瞬时真天球坐标系的差别是章动的影响,因此,两者的转换通过章动矩阵实现。章动矩阵计算模型为
-

-
-
其中, Δ ψ 、 Δ ε 分别为黄经章动和交角章动; ε S 为平黄赤交角,可以表示成
-
-
黄经章动和交角章动由 IAU 提供的章动模型 (IAU 1980 模型 ) 进行计算。
-
-
黄经章动、交角章动、乘系数参数由 IAU 1980 章动序列系数表给出,部分参数如下图所示:
-
- 虽然 IAU 1980 章动理论考虑了固体地核、液体外核以及地球弹性参数的影响,但所求
得的协议天极的位置与高精度的 VLBI 、 LLR 实测数据仍存在微小差异。该差异值 ( 也称天极偏移 ) 由 IERS 监测并在公报 B 中公布。
-
黄经章动和交角章动的差异值分别用δΔψ 和δΔε 表示,考虑这两个微小偏差后,得到章动的计算公式为
-

-




6.3瞬时真天球坐标系与瞬时地球坐标系的转换
-
瞬时真天球坐标系与瞬时地球坐标系的 Z 轴 均指向瞬时地球自转轴的极点,故两者指 向相同;X 轴指向不同:前者 X 轴指向春分点,后者 X 轴指向格林尼治平均子午面与赤道 的交点。
-
春分点 E 和格林尼治平均子午面与赤道的交点的夹角为格林尼治真恒星时 (GAST) 。 格林尼治真恒星时随地球自转不断变化,因此,两者之间的转换为
-

-

-

-
-

6.4瞬时地球坐标系与协议地球坐标系的转换
- 瞬时地球坐标系:按照 Z 轴指向瞬时地球自转方向,X 轴指向瞬时春分点(真春分点),Y 轴按构成右手坐标系取向所构成的坐标系。
- 为了便于应用,在建立地球坐标系时,我们总是将坐标轴与地球上一些重要的点、线、面重合,例如,让Z轴与地球自转轴重合,让X轴位于起始子午面与赤道面的交线上等。然而由于极移的存在,瞬时坐标系中的三个坐标轴在地球本体内的指向是不断变化的,不适合用来表示点的位置。
- 协议地球坐标系:ITRF国际地球参考框架
-
瞬时地球坐标系与协议地球坐标系的差别是极移的影响,因此,两者的转换通过极移矩阵实现。极移矩阵计算模型为
-

-
-
其中, x p 、 y p 为极移量,可通过 IERS 网站获取其发布的 EOP
-
IERS 发布的 EOP 数据包括公报 A(Bulletin A) 、公报 B(Bulletin B) 、公报 C(Bulletin C) 和公报 D(Bulletin D) 。这些数据的存储格式为 ASCII 文本格式,可使用标准的文本编辑器 进行查看和编辑。 IERS 官网 (http://www.iers.org) 公布这些数据和详细的数据格式说明。 下面 对四个公报进行简要说明。
-
(1) 公报 A 包含地极坐标 ( x 、 y ) 和 UT1 − UTC 以及它们的误差。公报 A 的数据时间间隔 为一天,一周更新一次。公布一周的 EOP 数据及此后一年的预报 EOP 数据。
-
(2) 公报 B 提供 IERS 参考系统下最新的地球指向信息,包括 UT 、地极坐标和天极偏 移 ( 包括黄经章动和交角章动的差异值 ) 。公报 B 一月更新一次。公布一月的 EOP 数据及此 后一个月的预报 EOP 数据。
-
(3) 公报 C 公布 UTC 的跳秒和 UTC − TAI 信息。公报 C 每 6 个月公布一次 。
-
(4) 公报 D 公布 DUT1 (DUT1=UT1 − UTC) 的值及其精度 。
-
七、国际参考坐标系及其转换关系
- 为提供一个精确稳定且国际通用的参考系和框架,以方便在天文、地理等领域的研究和工作,IERS 定义了国际天球参考系(ICRS)和国际地球参考系(ITRS),并实现和维持遵从ICRS 规定的国际天球参考框架(ICRF)和遵从 ITRS 规定的国际地球参考框架(ITRF)。
7.1国际地球参考系及其参考框架
-
根据 IERS 2010 协议,国际地球参考系的定义满足以下条件。
-
(1) 坐标原点与地球质心重合,地球质心是整个地球 ( 含海洋和大气 ) 的质量中心。
-
(2) 长度单位是 m ,符合国际天文学联合会和 IUGG(1991) 决议,由相对论模型得到。
-
(3) 坐标定向采用国际时间局给出的 BIH 1984.0 方向。
-
(4) 定向随时间的演变采用相对于整个地球的水平板块运动无净旋转 (No-Net-Rotation)条件。
-
- ITRF 的实现,即 ITRF 的建立与维持,是基于卫星激光测距(SLR)、甚长基线干涉测量技术(VLBI)、星载多普勒接收机定位和地面站跟踪定轨集成系统(DORIS)、全球卫星导航系统(GNSS)等空间大地测量技术组合得到的。这些观测数据首先由不同技术各自的技术中心——IVS(International VLBI Service)、ILRS(International Laser Ranging Service)、IGS(International GNSS Service)和 IDS(International DORIS Service)进行处理,然后由IERS根据各技术中心的处理结果进行加权得出 ITRF 的最终结果。
-
自 1988 年起, IERS 已经发布了 ITRF88 、 ITRF89 、 ITRF90 、 ITRF91 、 ITRF92 、 ITRF93 、ITRF94 、 ITRF96 、 ITRF97 、 ITRF2000 、 ITRF2005 和 ITRF2008 共 12 个版本的参考框架。其中, ITRF2005和ITRF2008 是参考框架中最具有代表性的两个,标志着 ITRF 的日益成熟。ITRF2005 首次采用了时间序列作为输入数据,首次采用紧组合方法,即同时估计测站坐标和地球定向参数,给出了 608 个站的位置和速度,以及与参考框架一致的地球自转参数。ITRF2008 基本沿用了 ITRF2005 数据处理策略和方法,它的改进主要表现在输入数据采用的是重新处理的坐标时间序列,以 SINEX 格式存储。并且它以新模型和软件重新处理了所有历史数据,获得了高精度、长期的测站坐标时间序列
7.2国际天球参考系及其参考框架
-
国际天球参考系是基于运动学定义的参考系,以太阳系质心为坐标原点,其坐标轴相对于一组河外射电源是固定的。X 轴指向春分点, Z 轴平行于地球自转轴, Y 轴与 X 、 Z 轴构成右手坐标系。其 XOY 平面 ( 基本平面 ) 平行于 J2000.0 平赤道面, X 轴指向接近 J2000.0平春分点。将坐标原点平移到地球质心,即可得到以地球质心为原点的天球参考系,称为地心天球参考系(GCRS) 。
-
国际天球参考系由河外射电源、类星体以及几个活动星系的精确坐标所定义的国际天球参考框架实现。与银河系中的恒星不同,河外射电源距太阳的距离十分遥远,目前精度下观测不到它们的运动,因此假设没有自行。在此假设前提下,利用这些遥远的河外射点源的坐标,就可以建立一个运动学无旋转的与历元无关的准惯性参考系。
7.3地心天球坐标系与国际地球参考系的转换关系
- 在 IAU2000 规范下,地心天球坐标系与国际地球参考系的转换方法目前主要有两种:
- 一是基于春分点的转换方法;
- 二是基于天球中间零点(CIO)的转换方法。
7.3.1基于春分点的 GCRS 与 ITRS 转换方法
- 在基于春分点的转换方法中,GCRS 转化到 ITRS (也是协议地球参考系)的流程如图所示:
-

-
-
其中, X [ITRS] 为 ITRF 下的坐标; X [GCRS] 为 GCRF 下的坐标; W 为极移矩阵; R (GAST) 为将瞬时天球坐标系统绕 Z 轴旋转 GAST 得到瞬时地球坐标系的旋转矩阵, GAST 表示真春分点的格林尼治恒星时角; N 、 P 、 B 分别为章动、岁差和参考框架偏差矩阵。其中,参考框架偏差矩阵 B 是由于 GCRS 与 J2000.0 参考系之间存在微小偏差引起的。
7.3.2基于 CIO 的 GCRS 与 ITRS 转换方法
- 在基于 CIO 的系统中,由于不依赖于春分点,采用了新的岁差章动模型以及改进的极移改正模型,与传统的基于春分点的系统相比,GCRS 与 ITRS 的相互转换的方法与过程有所不同。新转换方法主要包括 GCRS 转为天球中间参考系、天球中间参考系转换为瞬时地球坐标系、瞬时地球坐标系转换为 ITRS 三个过程。
-


-


开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 39
39 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)