LIO-SAM算法解析
LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,GPS因子、回环因子。虽然在创新点上没什么让人觉得有趣的东西,但是在性能上相比Lego-Loam,因为加入了高频的IMU,在一些不好的场景下表现要更鲁棒,回环处的漂移也更小。不过虽然加入了IMU,但似乎连松耦合都称不上,IMU预积分在LIO-SAM中的作用仅用来对
文章目录
简介
LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,GPS因子、回环因子。
虽然在创新点上没什么让人觉得有趣的东西,但是在性能上相比Lego-Loam,因为加入了高频的IMU,在一些不好的场景下表现要更鲁棒,回环处的漂移也更小。
不过虽然加入了IMU,但似乎连松耦合都称不上,IMU预积分在LIO-SAM中的作用仅用来对激光点云做运动补偿去畸变,以及在scan-2-map时提供优化的初始位姿
综上,算是一个比较不错的入门算法吧。
参考链接: https://zhuanlan.zhihu.com/p/614039247
算法概述
算法输入: 激光点云,IMU原始数据,GPS(可选)
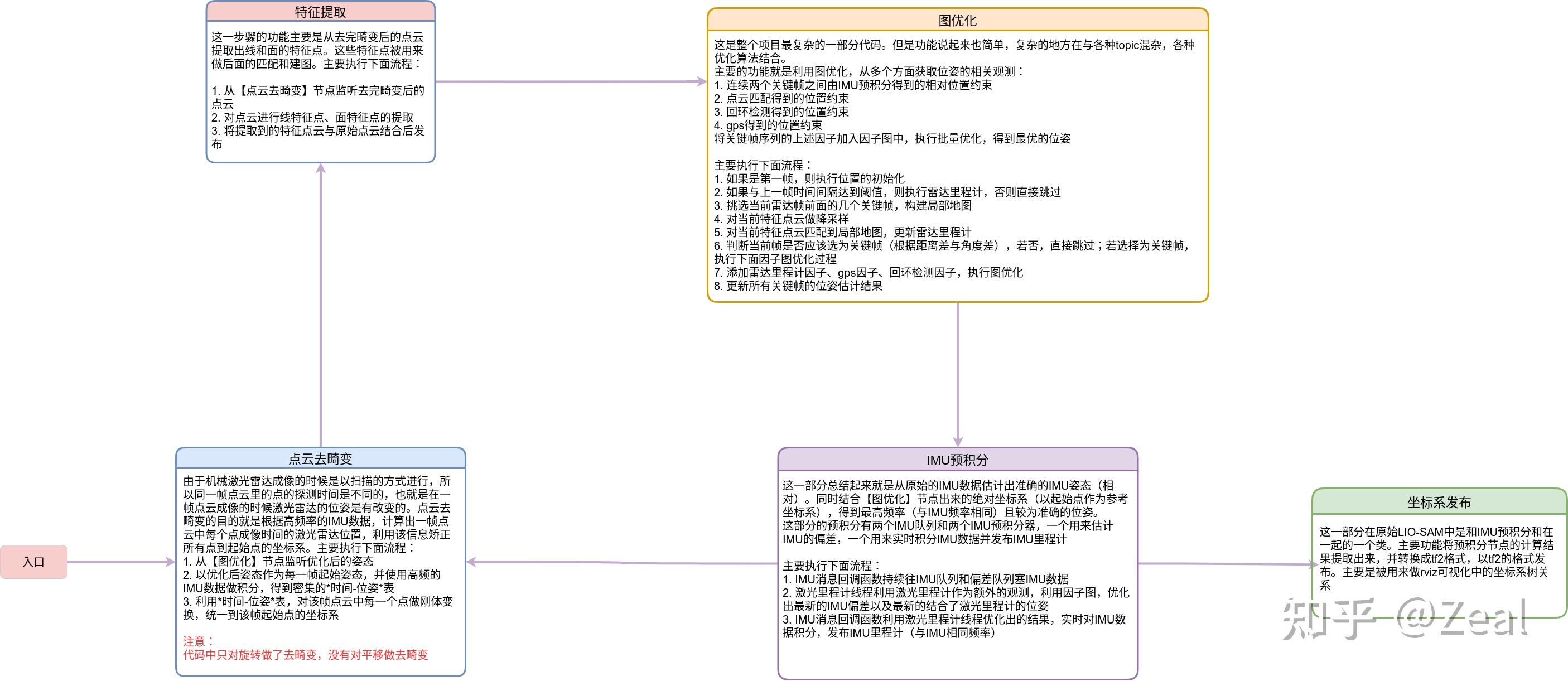
主要模块:
- 点云去畸变:对应
imageProjection.cpp - 特征提取:对应
featureExtraction.cpp - IMU预积分:对应
imuPreintegration.cpp - 地图优化:对应
mapOptmization.cpp

1.点云去畸变
相比于Lego-Loam,这里没有对点云进行分割和聚类操作,而是直接去畸变后将点云以及对应的位姿发布给特征提取模块。
1.1 主要功能
- imageProjecttion的主要功能是订阅原始点云数据和imu数据,根据高频的imu信息对点云成像时雷达的位移和旋转造成的畸变进行校正
- 同时,在发布去畸变点云的时候加入IMU输出的角度和IMU里程计(imuPreintegration)的角度和位姿作为该帧的初始位姿,作为图优化的初始估计
- 并且,要对点云的Range进行计算,同时记录每个点的行列,以便在特征提取中被使用
1.2 主要流程
- 接收到一帧点云
- 从IMU原始数据队列找到该帧点云时间戳对应的数据,将IMU的roll、pitch、yaw塞进准备发布的该帧点云信息
- 提取该帧点云的起止时间戳(激光雷达点云的每个点都有相对于该帧起始时间的时间间隔)
- 对起止时间内的IMU数据进行角度积分,得到该帧点云每个时刻对应的旋转。
注意,这里算法使用的是简单的角度累加,实际上是积分的近似,但是在很短的时间内,10Hz雷达对应100ms的扫描时间,近似的累加可以代替角度积分。
猜想这里是因为点云去畸变是整个SLAM流程的入口,要保证足够的实时性,因此用累加代替真正的角度积分 - 遍历该帧点云每个点,旋转到起始点坐标系
- 从IMU里程计提取该帧点云对应的位姿(包括位置和旋转),塞进准备发布的该帧点云信息
- 发布该帧点云信息
2.特征提取
- 接收到从imageProjection中发布出的一个去畸变点云信息cloudInfo(自定义格式)
- 对每个点计算曲率。计算时是计算周围点的平均距离用来作为曲率的替代
- 标记遮挡点和与激光平行的点,后续这些点不能采纳为特征点
- 特征提取。分别做角点(曲率大)和平面点(曲率小)特征点提取
- 整合信息,发布完整数据包
过程同Lego-Loam,详细见博客《Lego-Laom算法深度解析》
过程同Lego-Loam,详细见博客《Lego-Laom算法深度解析》
3.IMU预积分
和VIO常见算法不同,LIO-SAM是通过激光里程计矫正IMU的累计误差,然后对IMU原始数据进行连续积分得到关于IMU的里程计。
- IMU原始数据的旋转积分用于去除点云的旋转畸变
- IMU里程计的平移信息用于去除点云的运动畸变
- IMU里程计的位姿信息和对应点云一起被封装,为map-2-scan提供初值
在计算IMU里程计时,使用了因子图,利用激光里程计因子和IMU因子对IMU位姿、速度和偏置进行了因子图优化。
4.地图优化
核心函数在laserCloudInfoHandler,主要流程如下:
- 位姿初始化
updateInitialGuess - 构建局部地图
extractSurroundingKeyFrames - 点云降采样
downsampleCurrentScan - map-2-scan并进行位姿优化
scan2MapOptimization - 创建关键帧
saveKeyFramesAndFactor - 回环校正
correctPoses - 里程计和位姿发布
详细内容见链接:https://zhuanlan.zhihu.com/p/622003523
4.1 位姿初始化
读取特征提取模块的线特征和平面特征,以及由IMU预积分提供的初始位姿。
线特征和平面特征由特征提取模块featureExtraction发布,
- 第一帧做初始化:直接使用IMU输出roll、pitch、yaw作为当前帧的初始位姿。
- 后续帧初始化:
- 如果IMU里程计可用(已经融合了激光里程计结果),使用其作为6D位姿初始化
- 如果IMU里程计不可用但IMU原始角度可用,则在上一帧的位姿上叠加IMU角度的变化作为初始化
4.2 构建局部地图
挑选局部地图关键帧的方法很巧妙,每个关键帧的位置(x,y,z)坐标本质上也是一堆3D点,因此可以使用KD树搜索距离当前关键帧最近的点云,同时又对这些3D点位置进行降采样,3D点的稀疏性保证了对应的关键帧位置不会挨得太近。选出关键帧后就提取对应的点云,转到同一个坐标系然后融合为局部地图。
- 对所有关键帧3D位姿构建KD树
- 使用最后一个关键帧位姿作为索引,从KD树中找到指定半径范围内的其他关键帧
- 对找出的关键帧数量做降采样,避免关键帧位姿太过靠近
- 加上时间上相邻的关键帧
- 对所有挑选出的关键帧数量再做一次降采样,避免位置过近
- 将挑选出的关键帧点云转换到odom坐标系。(这里使用一个map缓存坐标变换后的点云,避免重复计算)
- 对局部地图的角点、平面点点云做降采样,并融合到一个局部地图中
4.3 基于scan-2-map的位姿优化
分别进行角点和平面点匹配,找到候选点后整合在一起,然后进行匹配优化。
4.3.1 基于角点的匹配优化
- 将每个角点从雷达坐标系转换到map坐标系
- 基于KD树搜索得到局部地图中距离当前角点最近的5个点
- 5个点中,判断距离最远的点和当前点的距离,如果距离小于1m,认为该点有效
- 基于5个点距离中心的协方差矩阵和特征值判断5点是否构成一条直线
- 对协方差矩阵进行特征值分解
- 如果最大的特征值要远大于第二个特征值,则认为则5个点能够构成一条直线
- 计算点到直线的距离,如果距离小于阈值将该点作为优化目标点,计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
4.3.2 基于平面点的匹配优化
- 采用上述方法寻找5个平面点
- 对5点进行平面拟合,使用最小二乘求解超定方程
Ax+By+Cz+1=0 - 计算点到平面的距离,如果距离小于阈值将该点作为优化目标点,将当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
4.3.3 整合候选匹配点信息
将cornerOptimization和surfOptimization两个函数计算出来的边缘点、平面点到局部地图的距离、法向量集合在一起
4.3.4 基于高斯牛顿法进行迭代优化
基于点到直线、点到平面的距离构建残差方程,基于高斯牛顿法迭代求解使得残差最小时对应的位姿
求解过程是将雅格比矩阵的形式写出,然后计算高斯牛顿法的hessian矩阵,然后对Hessian进行QR分解计算特征向量来更新位姿,在达到最大迭代次数之前如果收敛则优化成功。
最后用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合(只加权融合roll、pitch角),更新当前帧位姿的roll、pitch,约束z坐标
4.4 添加关键帧并进行因子图优化
在地图优化模块,scan-2-map并没有使用因子图,只是简单的点云配准问题,通过解析解的方式迭代求解局部地图匹配位姿。只有在创建关键帧时才会将新的关键帧加入到因子图,并进行因子图优化位姿。该因子图如下所示:

- 变量:每个关键帧的位姿
- 因子:激光里程计因子、GPS因子、回环检测因子
- 虽然论文中也添加了IMU因子,但是在实现过程中并没有使用
4.5 回环纠正
实则是使用之前因子图优化后的位姿,对位姿序列相应关键帧的位姿进行替换
5.算法评估
论文中的对标基线是LOAM,下面的链接对LOAM系列的几个算法做了比较详细的评测,整体上LIO-SAM的稳定性较好因为加入了IMU,回环处的漂移较小
https://github.com/Tompson11/SLAM_comparison

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 10
10 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)