基于STM32的无人小车自主避障系统设计-毕业设计
首先,通过延时,通过主处理器的FO通道发送超声波高电平驱动信号所需的信号,同时开始计数。主控制器电压为+3.3V,而L298N驱动器电压为+5V,电机电压为+12V,因此可以选择择+12V作为系统电压。小车串联两节锂电池提供7.2V电压作为初始电源,经LM2596S芯片转换提供6V~12V电压输出,通过RC电路的调整为后续系统提供稳定的5V电源,为后续各个模块提供5V电源。当前方遇到障碍物时,小车
收藏和点赞,您的关注是我创作的动力
概要
自动避障小车是通过内部和外部传感器检测外部环境并在障碍物中工作的智能设备,可以执行避障循迹运动。本文提供了基于STM32嵌入式微处理器设计系统的技术。该小车采用四轮驱动设计作为其发动机平台和控制系统。选择STM32F103单片机作为主控制器,搭配驱动控制器L298N。整合了丰富的芯片外部资源,为智能设备提供了强大的平台。避开障碍和跟踪轨迹是智能设备应该具备的功能。本文介绍了硬件和软件工具、实现其功能的方法。避开障碍的方法主要有两种方式,红外线和超声波。这两种方法都使用传感器收集数据并传输到STM32F103的CPU,处理来自不同传感器的数据,并集成了前进、转向、后退等循迹避障功能。该过程简单且设置成本低。试验结果通过实验获得,实现了循迹避障功能。
软件设计使用Keil软件,以方便未来的更新和升级。第一章简要介绍了国内外自动化小车领域的研究环境,涉及自动避障、PC上位机和Android手机控制端的设计,并介绍了自动化小车在外太空领域的研究;第二章介绍智能小车硬件系统的设计;第三章介绍了设计软件系统,首先描述了Keil开发环境,然后详细说明了每个模块系统的软件程序;第四章接着描述了系统调试,描述了每个部分调试的细节;最后描述了该主题的工作愿景及不足之处
一、系统总体设计
1电源系统设计
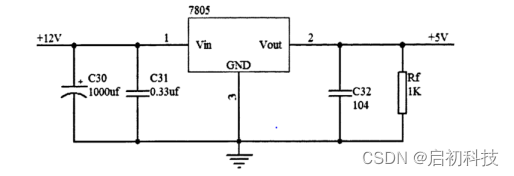
当设计一个智能设备时,消耗的电量分为两部分:处理器和计算机。主控制器电压为+3.3V,而L298N驱动器电压为+5V,电机电压为+12V,因此可以选择择+12V作为系统电压。+12V为1.2V4500mAh锂电池的10相电路加上+5V和+3.3V,+12V串联可直接由电池供电。电源转换电路如图2.1所示。

图2.1 +5V电源电路
STM32F103主控制器的额定电压为2.0-3.6V,常用的为3.3V。3.3V是由电压经过 LM117 获得的。电容器被添加到 LM117 的输入和输出中,提高了系统可靠性并减少了电源受到扰动的影响[11]。其电源电路图如图2.2所示

图2.2 +3.3V电源电路
2系统程序设计
系统总体框图
整车主控系统的主要特点是是完成系统初始化任务、超声波测距控制、红外传感器测距、发动机驱动控制和红外光电跟踪轨迹。 收到外部命令后,运行命令行成功。如果小车没有得到指示,会继续发现障碍。 如果前方没有障碍物,汽车将转向目标。当传感器检测到迎面而来的障碍物时,它会进行干预以避开障碍物,并且电机会向障碍物行驶。本小车主程序流程图如图3.2所示:

图3.2系统主程序流程图
由于用于检测障碍物的传感器分为超声波传感器和红外光电传感器,所以本模块系统又分为超声波传感器探测模块和红外线光电传感器探测模块。
(1) 超声波传感器模块
该模块的主要软件设计特点如下。首先,通过延时,通过主处理器的FO通道发送超声波高电平驱动信号所需的信号,同时开始计数。为了防止测距中的‘盲区’现象出现,我采用延时程序将输入中断延时一段时间。在延迟之后,该过程中止并且回波信号的检测终止。在计数结束之前,如果发生停止,正确计算中断系统以计算障碍物的距离。如果检测过程中探测器系统没有出现这样的故障,则将无障碍信息发送到主控系统。本系统的主要功能是完成测距的初始化程序、输出触发信号、计时程序开始、回响信号产生中断等。本模块流程图如图3.3所示:

图3.3超声波测距模块流程图
超声波传感器IO口定义,如图3.4所示:

图3.4超声波传感器IO口定义
电机循迹驱动模块程序设计
该模块主要控制左右PWM,有两个输出定时器TIM4,通过PB6 和PB7 输出,PWM 和PB10 和PB1 输出。 该输出用于控制前、后和发动机制动。 使用五个主要转向功能来控制发动机,具体如下:
电机驱动IO口
IN1 — 左电机前进 --PC11
IN2 — 左电机后退 --PD0
IN3 — 右电机前进 --PD6
IN4 — 右电机后退 --PG9
ENA — 左电机PWM—输入0时停车 --PD4
ENB — 右电机PWM—输入0时停车 --PD2
从程序设计讨论PWM脉冲输出,可以应用软件延迟法和时间延迟法。软件层虽然基本易于实现,但消耗大量系统资源,且不易实现。脉冲产生来自中断定时器,中断定时器是一个分离脉冲幅度的程序。在信号接收系统中,可以通过转换A/D 来产生信号。
电机驱动设计流程图,如图3.5所示 :

图3.5电机驱动设计流程图
二、基本内容
避障小车主要由主控模块、驱动模块、检测模块、报警模块、显示模块、电源模块六个模块组成。当前方遇到障碍物时,小车减速并判断其左侧是否有障碍物,无则左转,有则继续判断右侧是否有障碍物,无则右转,有则制动并后退。
⑴本设计考虑到stm32f103系列单片机具有强大、高效的指令系统、突出的能耗控制以及较为简便的开发环境,故选用STM32F103系列芯片作为主控芯片。
⑵转动方向功能、制动、正反转状态的实现需要设计一个完善的电源模块原理电路图。小车串联两节锂电池提供7.2V电压作为初始电源,经LM2596S芯片转换提供6V~12V电压输出,通过RC电路的调整为后续系统提供稳定的5V电源,为后续各个模块提供5V电源。
⑶红外传感器存在很多局限性,例如由于干扰而无法在阳光下使用它们。它可以使户外应用或黑暗的室内应用非常困难。超声波传感器使用声波工作,检测障碍物不受多种因素的影响。因此本次实验采用HC-SR04超声波模块,该芯片具有较高的集成度以及良好的稳定性,测度距离十分精确,十分稳定。供电电压为DC5V供电电流小于10mA,探测距离为0.010m-3.5m一共有四个引脚VCC(DC5V)、Triger(发射端)、Echo(接收端)、GND(地)。
三、 内容截图






四、 文章目录
目 录
1 绪论………………………………………………………………………………1
1.1 研究背景…………………………………………………………………Y
1.2 国内外研究现状………………………………………………………………Y
1.3选题背景和研究内容……………………………………………………………Y
1.4本章小结………………………………………………………………Y
2 方案论证……………………………………………………………………Y
2.1 功能需求分析…………………………………………………………………Y
2.2技术应用概况…………………………………………………………………Y
2.3本章小结…………………………………………………………………Y
3 硬件设计………………………………………………………………………Y
3.1 芯片选型及系统框架……………………………………………………………Y
3.2原理图设计…………………………………………………………………Y
4 软件开发………………………………………………………………………Y
4.1 开发软件应用……………………………………………………………Y
4.2程序流程图…………………………………………………………………Y
5 综合测试………………………………………………………………………Y
5.1硬件测试……………………………………………………………Y
5.2功能测试…………………………………………………………………Y
6总结与展望………………………………………………………………………Y
致谢 …………………………………………………………………………………Y
参考文献……………………………………………………………………………Y
附录…………………………………………………………………………………Y

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)