ROS+Gazebo仿真差速小车并实现控制
利用xacro描述文件创建差速小车模型,通过gazebo仿真此模型,然后利用libgazebo_ros_diff_drive.so插件控制小车的运动,最后实现了通过键盘按键,控制gazebo环境中的小车运动。
本工程的功能包有两个,分别用于gazebo仿真与键盘控制运动
功能包原文件如下:
diff_wheeled_robot_control : https://huffie.lanzouw.com/iXilxvdqola
diff_wheeled_robot_gazebo: https://huffie.lanzouw.com/ixG3uvdqoyd
准备工作:
如果你是第一次使用gazebo,需要先安装下面的包才可以正常使用:
(这里以noetic版本为例,如果你是其他版本的ros,自行更换中间的代码即可)
sudo apt install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros ros-noetic-gazebo-msgs ros-noetic-gazebo-plugins ros-noetic-gazebo-ros-control
安装完成后,在命令行执行 gazebo命令检查是否正确安装,如果看到下面的界面说明安装没有问题。

然后再在命令行中运行下面的命令,检查Gazebo的ROS接口是否正常:
roscore & rosrun gazebo_ros gazebo
这个命令会运行roscore,同时也会启动gazebo,如果能看到gazebo的界面说明没有问题。
一、创建小车模型
1. 首先创建一个功能包
catkin_create_pkg diff_wheeled_robot_gazebo roscpp tf geometry_msgs urdf rviz xacro
如果之前没有创建过ROS工作空间,可以先执行如下命令创建
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace catkin_make source devel/setup.bash echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
2. 创建基本文件夹
cd diff_wheeled_robot_gazebo/
mkdir urdf meshes launch world
3. 复制模型文件
将提供的gazebo工程包urdf文件夹中的 diff_wheeled_robot.xacro 文件和 wheel.urdf.xacro 文件复制进自己的工程的urdf文件夹内。
同时将mesh文件夹中万向轮的三维模型 caster_wheel.stl 文件复制进自己工程的meshes文件夹内。
关于xacro的代码解释,可以参考另一篇机械臂相关内容:urdf与xacro的使用方法 & 机械臂模型仿真示例
4. 创建launch文件
回到上一级,进入launch文件夹,创建一个diff_wheeled_gazebo.launch文件,并在其中添加如下代码
vim diff_wheeled_gazebo.launch
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- urdf xml robot description loaded on the Parameter Server-->
<param name="robot_description" command="$(find xacro)/xacro $(find diff_wheeled_robot_gazebo)/urdf/diff_wheeled_robot.xacro" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model diff_wheeled_robot -param robot_description"/>
</launch>
5. 编译并启动节点,查看机器人模型
首先编译工作空间
cd ~/catkin_ws
catkin_make
然后启动节点
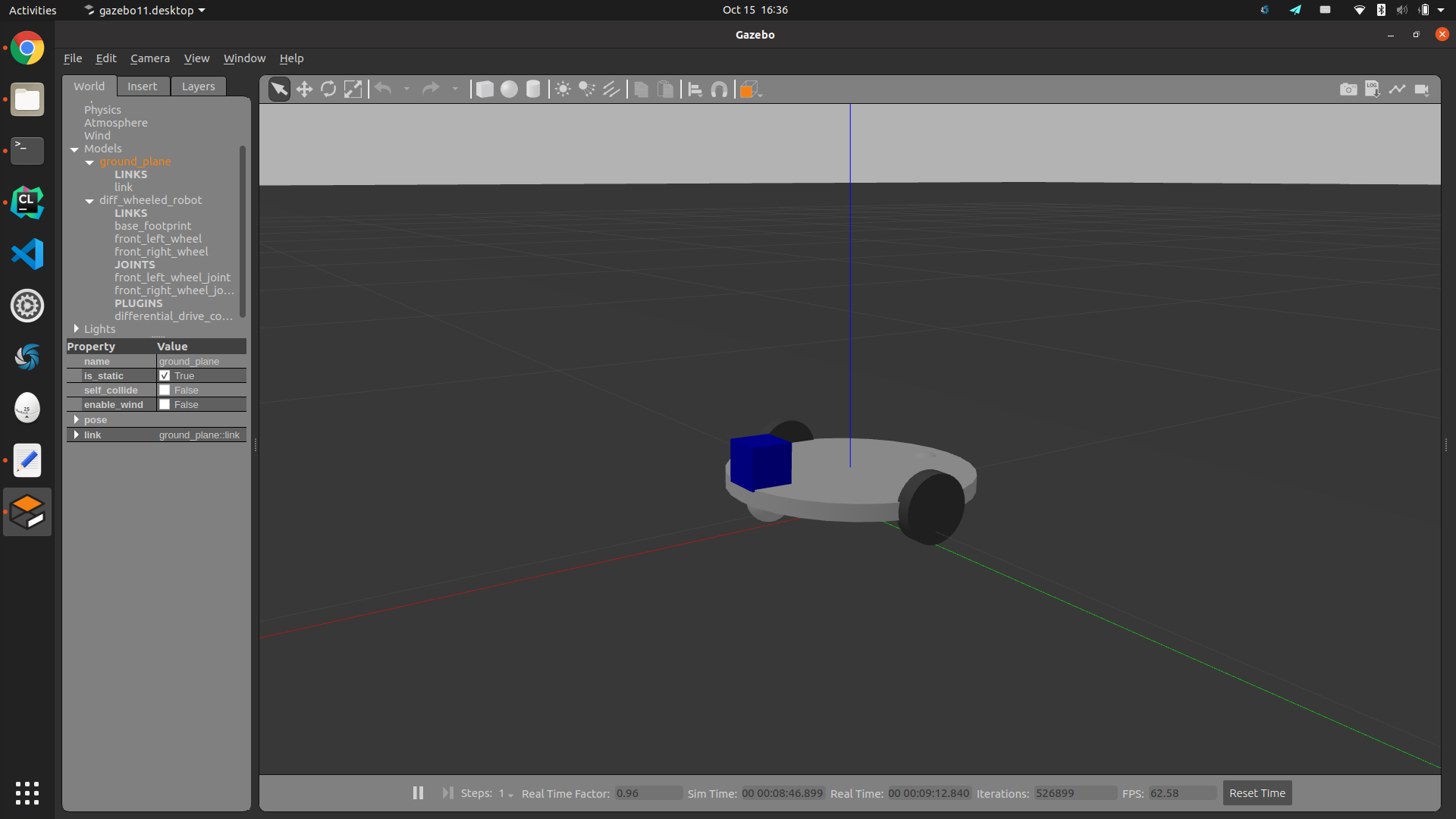
roslaunch diff_wheeled_robot_gazebo diff_wheeled_gazebo.launch
可以看到已经正常启动Gazebo,并且小车的模型也已经正常加载出来了

二、控制小车移动
1. 插件介绍
控制小车移动所使用的插件是 libgazebo_ros_diff_drive.so 。此插件的添加代码已经写在了xacro文件中如下:

其中可以指定的参数包括轮子的关节、轮子的间距、车轮直径、里程计的主题等等。这里面最重要的一个参数是控制命令主题 commandTopic,用于驱动车轮的运动。在这里我们可以通过向 /cmd_vel 主题发布数据来控制小车的运动。
2. 测试运动
在gazebo仿真正常运行的情况下,新打开一个终端输入如下指令,可以使小车进行圆周运动。
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'

三、键盘控制小车移动
1. 创建功能包
创建一个功能包用于驱动小车
cd ~/catkin/src
catkin_create_pkg diff_wheeled_robot_control rospy tf geometry_msgs urdf rviz xacro
将control工程包中的launch文件夹和scripts文件夹复制到新创建的功能包中。
2. 编译启动仿真
回到工作空间目录进行编译
catkin_make
启动仿真程序
首先和之前一样启动小车的仿真程序
roslaunch diff_wheeled_robot_gazebo diff_wheeled_gazebo.launch
然后新打开一个终端启动键盘控制程序
roslaunch diff_wheeled_robot_control keyboard_teleop.launch
这时候终端窗口内会出现提示,在终端内按下按键即可控制小车



开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 27
27 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)