大象机器人MyCobot六轴机械臂的基本操作(二)
上一讲我们做ssh和vnc的设置,有小伙伴问设置些有什么用,那么这里我先来解释一下这些功能有什么用处,首先我们可以通过ssh在我们的Windows桌面进行程序开发,然后上传到树莓派进行验证,我们也可以在windows平台通过vnc远程操作我们的机械臂,这样你就可以在自己的工作台上自由编程和上网查资料,然后MyCobot他不会占用你的显示器。当然了,你也可以直接拿这个树莓派当做开发机器使用,也是没有
上一讲我们做ssh和vnc的设置,有小伙伴问设置些有什么用,那么这里我先来解释一下这些功能有什么用处,首先我们可以通过ssh在我们的Windows桌面进行程序开发,然后上传到树莓派进行验证,我们也可以在windows平台通过vnc远程操作我们的机械臂,这样你就可以在自己的工作台上自由编程和上网查资料,然后MyCobot他不会占用你的显示器。当然了,你也可以直接拿这个树莓派当做开发机器使用,也是没有问题了。
在这里我们使用pycharm的社区版(Community)就可以了,python的开发工具很多,也可使用notepad++、jupyter、VSCode等,随便你方便就行。这里我们主要使用notepad++和pycharm来做为我们本次教学的编程软件进行讲解。
Myblockly
这个软件是机械臂树莓派里自带的一种开发工具,有兴趣的小伙伴可以自己试一下。
好啦我们开始进入到机械臂的基本操作
一:机械臂的校准
MyCobot机械在使用前要进行一次校准,这样我们做实验时才能得到正确的结果,那么MyCobot机械臂如何校准呢?
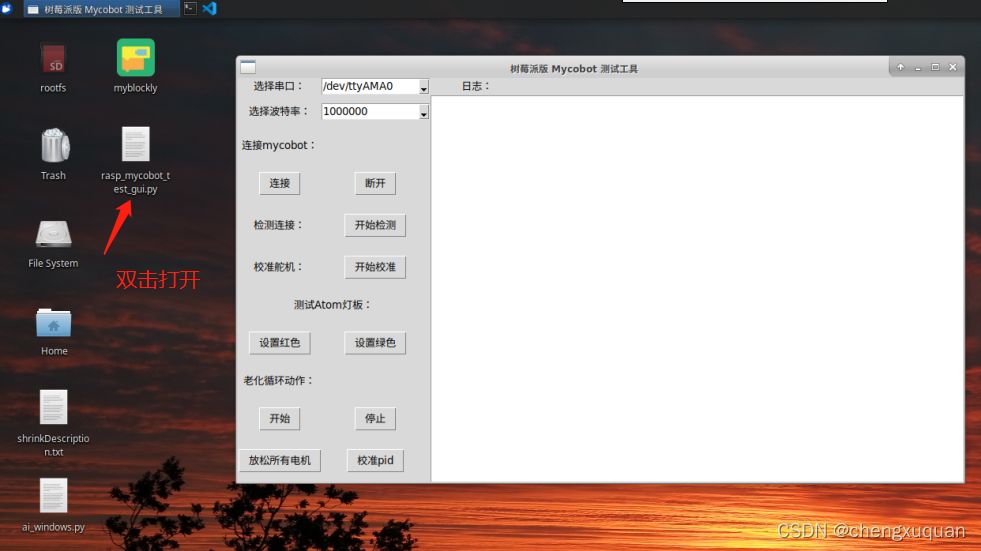
(1)在桌面双击rasp_mycobot_test_gui.py,弹出右侧界面。

(2)选择串口:注意树莓派的串口是ttyAMA0,波特率:1,000,000。这个一定要记住,因为后面我们要经常用到这个参数。然后点击”连接mycobot“:下面的”连接“。
(3)手动将机械臂的每节机械臂定位卡位对齐,如图:


总共六节机械臂都要对齐。然后我们点击:”校准舵机:开始校准“,要连点六次。这个时侯机械臂会自动进行舵机的校准工作。

如图所示,这样舵机就校准好了。我们关掉这个界面,介绍我们今天最最重要的一个概念,机械臂的坐标系系统。
二:机械臂的坐标系统
在整个机械臂的学过程中,最为重要的一点是你必段了解机械臂的坐标系统系统,也就是机械臂在空间中是怎么定位的。在这里我们面要明确的两个概念一个是坐标系统,一个是姿态。而空间中一点的姿态,可以由多种表示方式,其中最常用的是欧拉坐标。
(1)直角坐标系:在本课程中的坐标系统指的就是直角坐标系统,也称为迪卡尔坐标系统,也就是空间中的一点垂直于X、Y、Z轴的距离,通常记为(x,y,z)。

(2)欧拉坐标:用于表示空间中某个点的姿态,是在直角坐系中的某个点,沿x,y,z轴任意轴旋转一定角度后的一个计算值,该值称为该点在此位置的一个姿态。

机械臂在空间的位置即包括直角坐标和欧拉坐标,一般记为:[X,Y,Z,rx,ry,rz],前面XYZ为直角坐标,后面的rx,ry,rz为欧拉坐标。
有关机械臂的坐标系统,有兴趣的小伙伴可以深入的学习,这里仅仅简单介绍一下,如果你想深入的学习,那么需要下功夫把数学,代数,几何要重新学习一下。这里不多陈述了。
(3)机械臂的关节角度


这里所说的是机械臂和关节间的角度与1、2、所描述的空间坐标要区分开。还记得前面我们校准机械臂时的零位吗?

机械臂的角度,就是每一轴,相对于这个定位标志的角度。因为我们讲的是六轴机械臂,所以各关节的角度表示为:([J1,J2,J3,J4,J5,J6],50),注意方括号里面是机械臂各关节的角度,圆括号里面的50,指的是机械臂到达指定角度的速度。
这一章我们就介绍到这里,下一章我们将以六个小程序,为大家展示机械臂的运行。
本文为CSDN博主「BBM的开源HUB」的原创文章,使用产品为大象机器人mycobot,侵删。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐

 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)