VINS mono 系统学习 四
转载: 白眼哥哥目的:学习存档vins是今年刚开源的vio系统,跑了数据集效果挺好的,所以看了paper和代码。视频地址:https://www.youtube.com/watch?v=I4txdvGhT6Igithub:https://github.com/HKUST-Aerial-Robotics/VINS-Mono.Git上
转载: 白眼哥哥
目的:学习存档
vins是今年刚开源的vio系统,跑了数据集效果挺好的,所以看了paper和代码。
视频地址:https://www.youtube.com/watch?v=I4txdvGhT6I
github:https://github.com/HKUST-Aerial-Robotics/VINS-Mono.Git
上一篇博文介绍了VINS的初始化过程,这篇博文主要介绍里程计部分的算法流程。
里程计部分的算法都是在一个滑动窗口中进行。具体步骤如下:
a) 首先,结合上一时刻的参数更新当前帧的位姿和特征点坐标;
b)优化
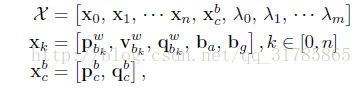
优化变量:
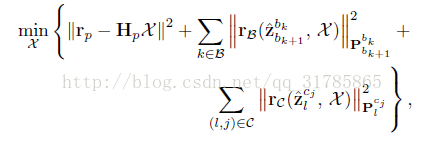
优化函数:分别是IMU测量误差、camera重投影误差、先验误差三个部分

初值:通过IMU预测得到。
最后,通过Ceres Solver求解器进行求解。Ceres Solver求解器在整个过程中不仅进行了目标优化,还做了Margin的工作(舒尔补margin)。
c)滑动窗口

准则:
若新帧是关键帧:margin窗口中最旧的帧,把IMU数据和camera数据都margin掉;
若新帧不是关键帧:margin掉新帧,保留IMU数据,去掉camera数据
其中,关键帧的判断在函数addFeatureCheckParallax()里面,通过视差阈值判断以及前后帧特征点个数进行判断的。
真正的margin是通过ceres求解器完成的。
有不对的地方欢迎指正!
参考文献:Technical Report: VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)