
认识ROS——ROS安装以及第一个例程
学习目标:认识ROS学习内容:一、历史起源2007年诞生于斯坦福STAIR项目,在Willow Garage中成长,成熟于OSRF二、总体设计一个目标:提高机器人研发中的软件复用率。(通俗来讲,现代模式对比于传统最大的区别就是避免重复造轮子。)五个特点:点对点、多语言、集成化、组件化、开源。1、点对点的设计•节点单元•分布式网络•RPC+TCP/UDP通信系统•适合多机协同2、多语言支持•支持Py
学习目标:
ROS是什么
学习内容:
一、历史起源
2007年诞生于斯坦福STAIR项目,在Willow Garage中成长,成熟于OSRF
二、总体设计
一个目标:提高机器人研发中的软件复用率。
(通俗来讲,现代模式对比于传统最大的区别就是避免重复造轮子。)
五个特点:点对点、多语言、集成化、组件化、开源。
1、点对点的设计
•节点单元
•分布式网络
•RPC+TCP/UDP通信系统
•适合多机协同
2、多语言支持
•支持Python、C++、Java等编程语言
•语言无关的接口定义
3、架构精简、集成度高
•每个功能节点可以单独编译
•继承众多开源项目
•接口统一、提高软件复用性
4、组件化工具包丰富
•3D可视化工具———rviz
•物理仿真环境——gazebo
•数据记录工具——rosbag
•Qt工具箱——rqt_*
5、免费开源
•BSD许可、可修改、可复用、可商用
•软件包数量级指数及增加,良好的生态系统
四位一体:通讯机制、开发工具、应用功能、生态系统

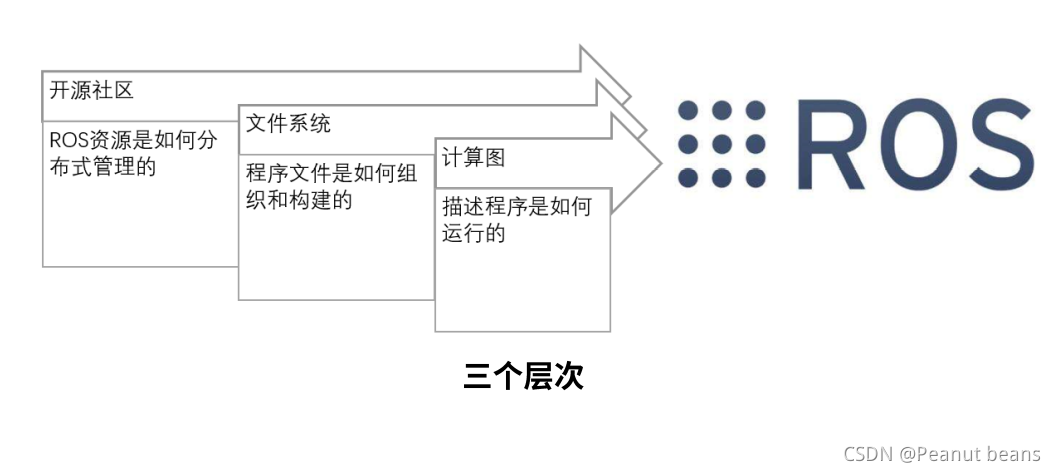
三、系统实现
一个
ROS系统实现----计算图
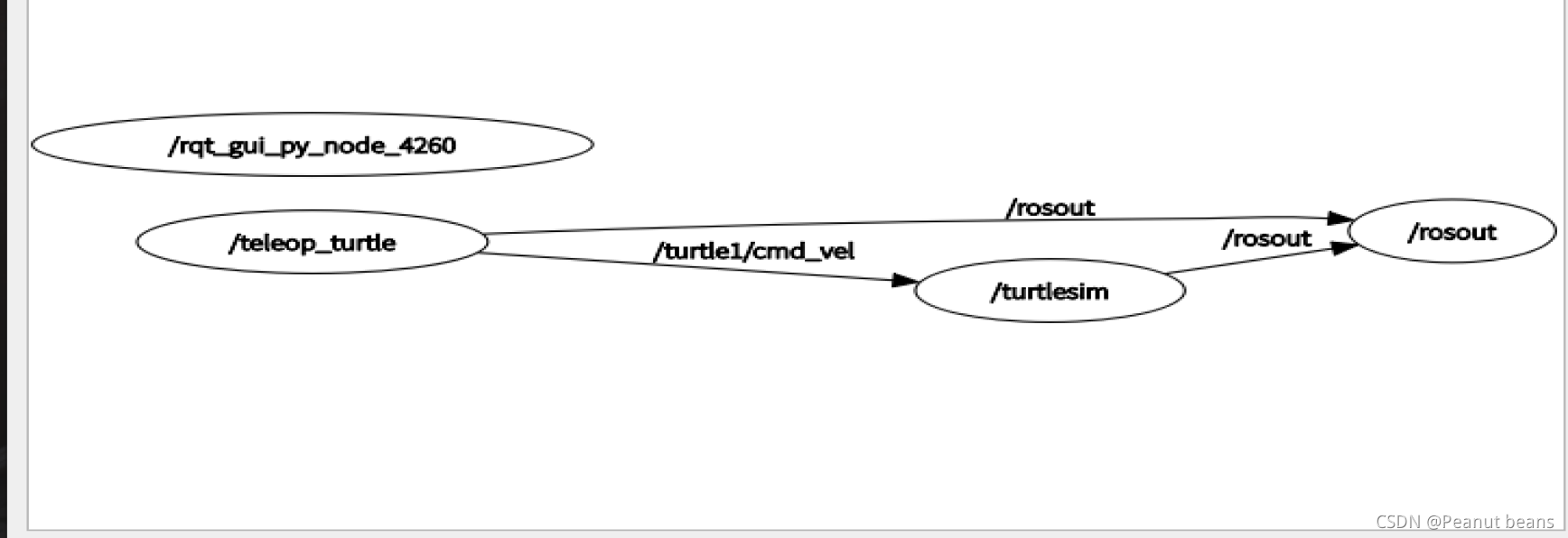
——————————————一个简单的ROS计算图——————————————
(1)节点(Node)——软件模块
(2)节点管理器(ROS Master)———控制中心,提供参数管理
(3)话题(Topic)————异步通信机制,传输消息(Message)
(4)服务(Srevic)————同步通信机制,传输请求/应答数据
ROS系统实现----文件系统
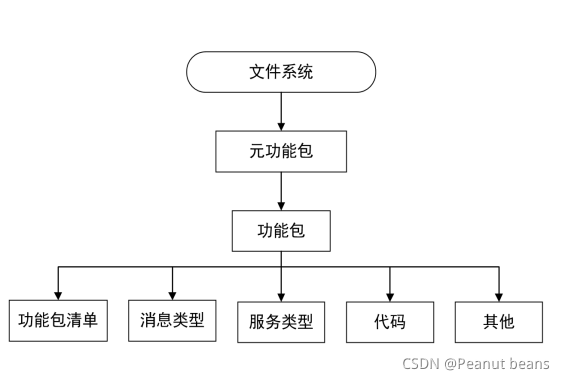
————————————ROS系统实现–文件系统——————————————
ROS系统实现----开源社区
-
发行版:ROS发行版包括一系列带有版本号、可以直接安装的功能包
-
软件源:ROS依赖于共享网络上的开源代码,不同的组织机构可以开发或者共享自己的机器人软件。 ROS wiki:记录ROS信息文档的主要论坛
-
邮件列表:交流ROS更新的主要渠道,同时也可以交流ROS开发的各种疑问
-
ROS Answers:咨询ROS相关问题的网站
-
博客:发布ROS社区中的新闻、图片、视频。
四、初次实践
一、ROS初次实践——版本选择
目前推荐版本————
ROS Kinetic Kame(发布日期:2016年5月23日--------停止支持日期:2021年4月)
二、ROS初次实践——安装方法
- 设置安装源
默认源 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
清华源 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
中科大源 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' /etc/apt/sources.list.d/ros-latest.list文件为新建文件,也可使用其他命令手动添加
- 设置key
> sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80'--recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 安装ROS
> 1)更新源
> sudo apt update
> 2)安装ros
> sudo apt installros-noetic-desktop-full
> 友情提示: 由于网络原因,导致连接超时,可能会安装失败,可以多次重复调用更新和安装命令,直至成功。
- 配置环境变量
> echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
> source~/.bashrc
- 安装rosinstall
> sudo apt-get install python-rosinstall python-rosinstall-generator
> python-wstool build-essential
- 安装成功
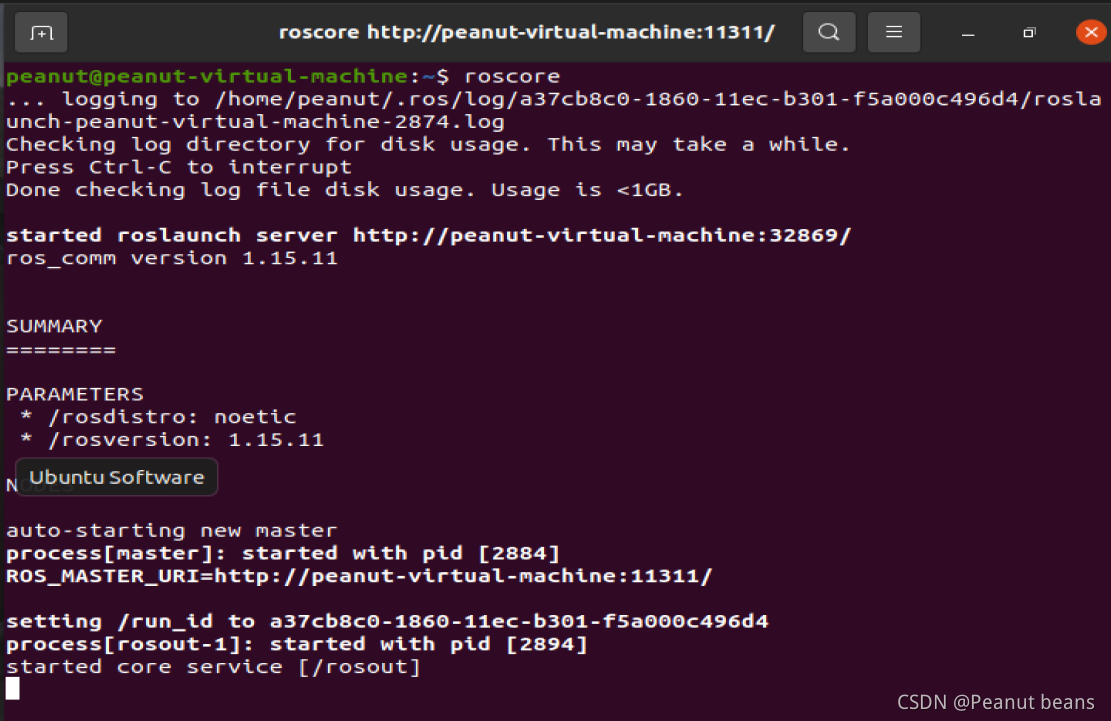
——————————使用roscore命令启动ROS Master——————————
三、ROS初次实践——命令工具
| 命令 | 作用 |
|---|---|
| catkin_create_pkg | 创建功能包 |
| rospack | 获取功能包的信息 |
| catkin_make | 编译工作空间中的功能包 |
| rosdep | 自动安装功能包依赖的其他包 |
| roscd | 功能包目录跳转 |
| rsocp | 拷贝功能包中的文件 |
| rosed | 编译功能包中的文件 |
| rosrun | 运行功能包中可执行文件 |
| roslaunch | 运行启动文件 |
四、第一个ROS例程(小海龟仿真)
> 1.启动ROS Master
> roscore
> 2.启动小海龟仿真器
> rosrun turtlesim turtlesim_node
> 3.启动海龟控制节点
> rosrun turtlesim turtle_teleop_key
启动三个终端(快捷键:Ctrl+Alt+T)分别输入命令即可。
完成!!!

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)