
Fast 3D point cloud segmentation using supervoxels with geometry and color for 3Dscene understanding
点云分割复现——Fast 3D point cloud segmentation using supervoxels with geometry and color for 3D scene understandingdemo展示项目地址论文效果复现流程后续demo展示项目地址github地址:Fast 3d pointcloud segmetation论文地址:论文论文效果参考:解读文章效果:复
·
点云分割复现——Fast 3D point cloud segmentation using supervoxels with geometry and color for 3D scene understanding
demo展示
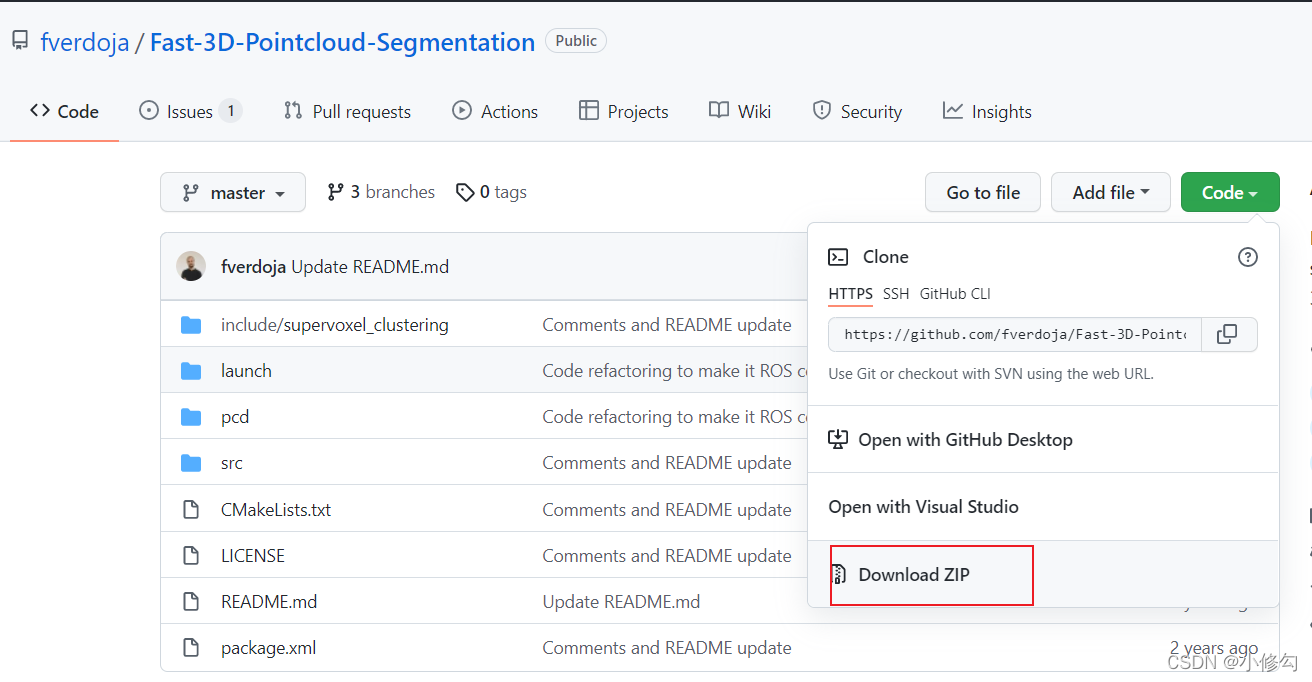
项目地址
github地址:Fast 3d pointcloud segmetation
论文地址:论文
论文效果
参考:解读文章
效果: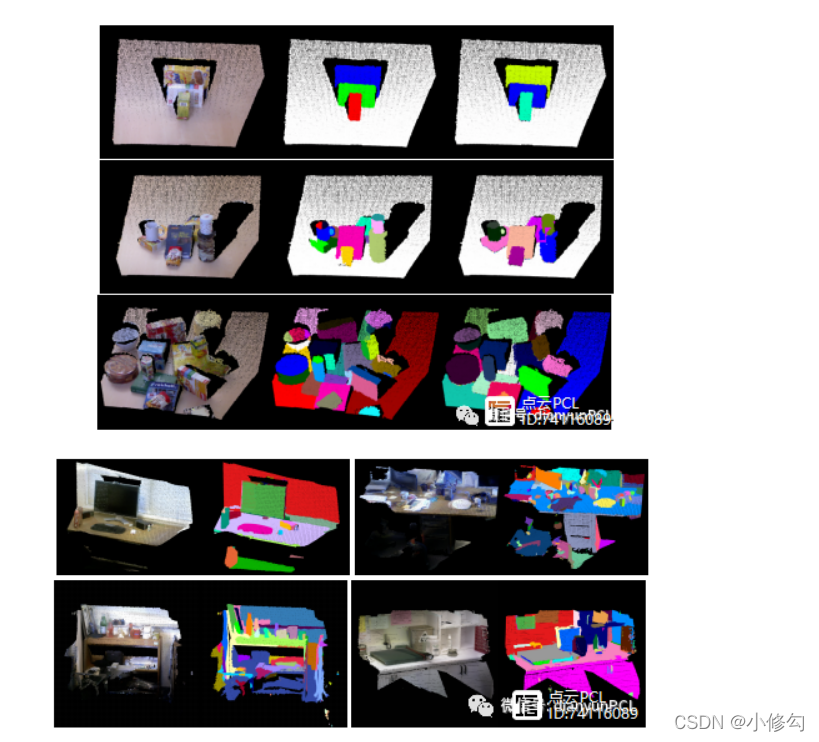
复现流程
1、源码下载
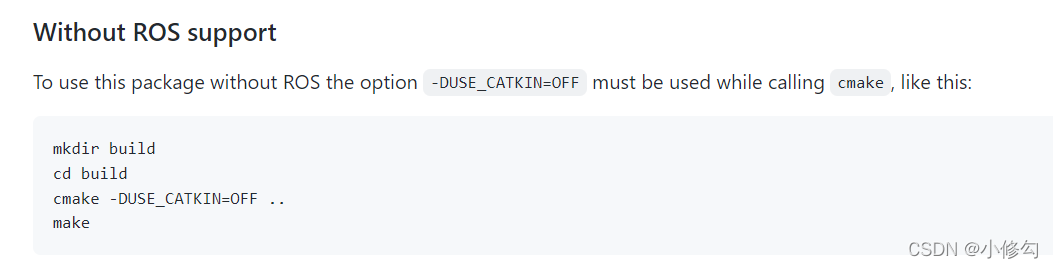
方法一:cmake
我尝试一遍,出现不少错误,遂放弃。
方法二:新建VS工程
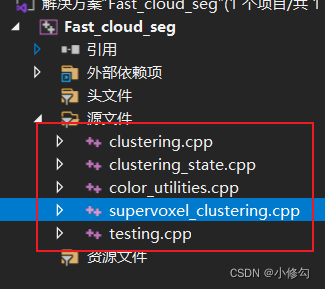
1)将源码中相关文件拷贝到新的工程中,进行编译。
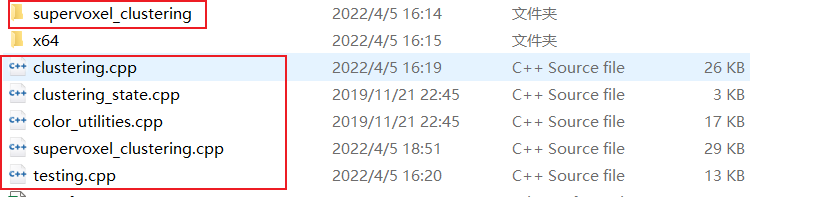
2)如下所示
3)属性列表设置
添加opencv、pcl相关属性。
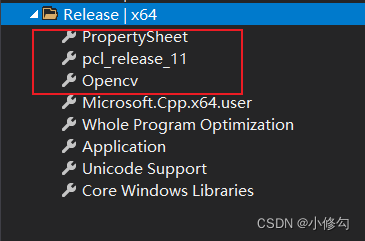
另外一属性列表添加相关supervoxel文件夹,如下所示。

4)错误提示
- 1
shared_ptr相关问题,由于该版本适配PCL1.8,当我用PCL1.11.1时,会报错,此时将shared_ptr更改为boost::shared_ptr - 2依据是指针报错,还是版本问题,改用new,类似如下:
PointCloudT::Ptr cloud (new PointCloudT); - 3 参数设置,参考github issue
后续
运行测试:

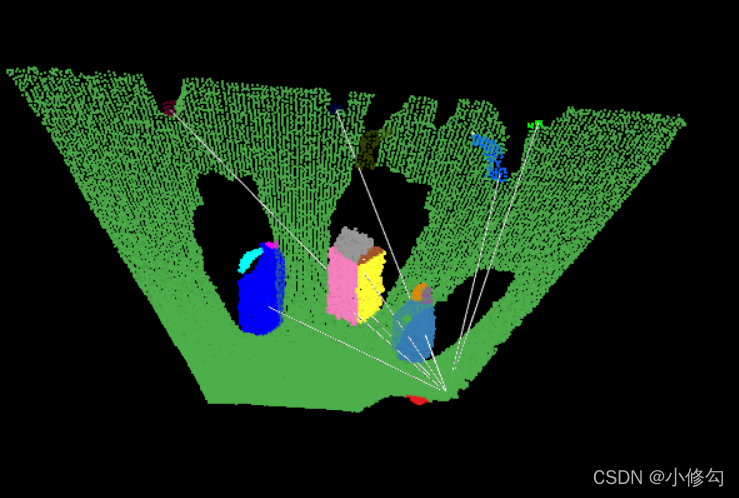
分割效果还是可以的,后续会添加到PCL+QT相关软件中。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)