

ArduPilot之H743+BMI270x2+First Normal Takeoff
通过上面亲手解决问题,其实最为重要的一点,是建立了与开源社区的联系,以及问题解决的途径和方法。当然,也加深了对特定硬件和问题的深入理解程度。
ArduPilot之H743+BMI270x2+First Normal Takeoff
1. 源由
鉴于目前该飞控板子在ArduPilot开源社区尚未得到官方支持(合入开源),一路走来遇到不少“坑”。
不过整体方向上还是围绕“Betaflight转ArduPilot飞行,体验更好的GCS控制体验。”
2. 正常起飞
配置文件+二进制:H743-BMI270x2-v30.zip
注:后续更新的固件,详见:SnapDragonFly 4.4.x
1)【已解决】VTX不正常 //PINIO DC2DC控制未打开
2)【已解决】外置Flash log功能不正常 //相关功能代码未编译到固件
3) 优化串口顺序(依据板子丝印顺序定义) //排序混乱,与丝印不一致
4) 提供二进制编译结果,可直接使用 //方便验证
启动日志
2023/6/1 6:16:37 : GPS 1: detected as u-blox at 230400 baud
2023/6/1 6:16:35 : EKF3 IMU0 MAG0 initial yaw alignment complete
2023/6/1 6:16:34 : EKF3 IMU0 tilt alignment complete
2023/6/1 6:16:33 : AHRS: EKF3 active
2023/6/1 6:16:33 : EKF3 IMU0 initialised
2023/6/1 6:16:31 : VTX: R8 5917MHz, PWR: 0mW
2023/6/1 6:16:31 : RCOut: DS600:1-4 PWM:5-8
2023/6/1 6:16:31 : AHRS: DCM active
2023/6/1 6:16:31 : ArduPilot Ready
2023/6/1 6:16:30 : Barometer 1 calibration complete
2023/6/1 6:16:29 : ELRS: RSSI now displays normally
2023/6/1 6:16:29 : Initialising ArduPilot
2023/6/1 6:16:28 : Frame: QUAD/X
2023/6/1 6:16:28 : RCOut: Initialising
2023/6/1 6:16:28 : H743_BMI270x2_v30 00290029 30315119 39373436
2023/6/1 6:16:28 : ChibiOS: 66e5de0d
2023/6/1 6:16:28 : ArduCopter V4.3.6 (0c5e999c)
2023/6/1 6:16:28 : Frame: QUAD/X
2023/6/1 6:16:28 : RCOut: Initialising
2023/6/1 6:16:28 : H743_BMI270x2_v30 00290029 30315119 39373436
2023/6/1 6:16:28 : ChibiOS: 66e5de0d
2023/6/1 6:16:28 : ArduCopter V4.3.6 (0c5e999c)
2023/6/1 6:16:28 : Frame: QUAD/X
2023/6/1 6:16:28 : RCOut: Initialising
2023/6/1 6:16:28 : H743_BMI270x2_v30 00290029 30315119 39373436
2023/6/1 6:16:28 : ChibiOS: 66e5de0d
2023/6/1 6:16:28 : ArduCopter V4.3.6 (0c5e999c)
2023/6/1 6:16:28 : Calibrating barometer
2023/6/1 6:16:28 : RCInput: decoding CRSF(3)
2023/6/1 6:16:28 : CRSFv2: requesting RX device info
测试视频:前后,左右 //stablize模式
ArduPilot Mark4 H743 BIM270 Dual正常首次试飞
H7Dual参数
ACRO_BAL_PITCH,1
ACRO_BAL_ROLL,1
ACRO_OPTIONS,0
ACRO_RP_EXPO,0.3
ACRO_RP_RATE,360
ACRO_RP_RATE_TC,0
ACRO_THR_MID,0
ACRO_TRAINER,2
ACRO_Y_EXPO,0
ACRO_Y_RATE,202.5
ACRO_Y_RATE_TC,0
ADSB_TYPE,0
AHRS_COMP_BETA,0.1
AHRS_EKF_TYPE,3
AHRS_GPS_GAIN,1
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_ORIENTATION,0
AHRS_RP_P,0.2
AHRS_TRIM_X,-0.003456364
AHRS_TRIM_Y,0.009216254
AHRS_TRIM_Z,0
AHRS_WIND_MAX,0
AHRS_YAW_P,0.2
ANGLE_MAX,3000
ARMING_ACCTHRESH,0.75
ARMING_CHECK,0
ARMING_MIS_ITEMS,0
ARMING_OPTIONS,0
ARMING_RUDDER,2
ARSPD_TYPE,0
ATC_ACCEL_P_MAX,165300
ATC_ACCEL_R_MAX,165300
ATC_ACCEL_Y_MAX,31500
ATC_ANG_LIM_TC,1
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
ATC_ANG_YAW_P,4.5
ATC_ANGLE_BOOST,1
ATC_INPUT_TC,0.15
ATC_RAT_PIT_D,0.0036
ATC_RAT_PIT_FF,0
ATC_RAT_PIT_FLTD,37.5
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,37.5
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_IMAX,0.5
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_SMAX,0
ATC_RAT_RLL_D,0.0036
ATC_RAT_RLL_FF,0
ATC_RAT_RLL_FLTD,37.5
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,37.5
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_IMAX,0.5
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_SMAX,0
ATC_RAT_YAW_D,0
ATC_RAT_YAW_FF,0
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,37.5
ATC_RAT_YAW_I,0.018
ATC_RAT_YAW_IMAX,0.5
ATC_RAT_YAW_P,0.18
ATC_RAT_YAW_SMAX,0
ATC_RATE_FF_ENAB,1
ATC_RATE_P_MAX,0
ATC_RATE_R_MAX,0
ATC_RATE_Y_MAX,0
ATC_SLEW_YAW,6000
ATC_THR_MIX_MAN,0.1
ATC_THR_MIX_MAX,0.5
ATC_THR_MIX_MIN,0.1
AUTO_OPTIONS,0
AUTOTUNE_AGGR,0.1
AUTOTUNE_AXES,7
AUTOTUNE_MIN_D,0.001
AVD_ENABLE,0
AVOID_ACCEL_MAX,3
AVOID_ALT_MIN,0
AVOID_ANGLE_MAX,1000
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_BEHAVE,0
AVOID_DIST_MAX,5
AVOID_ENABLE,3
AVOID_MARGIN,2
BARO_ALT_OFFSET,0
BARO_ALTERR_MAX,2000
BARO_EXT_BUS,-1
BARO_FIELD_ELV,0
BARO_FLTR_RNG,0
BARO_GND_TEMP,0
BARO_OPTIONS,0
BARO_PRIMARY,0
BARO_PROBE_EXT,0
BARO1_DEVID,357889
BARO1_GND_PRESS,100587.8
BARO1_WCF_ENABLE,0
BARO2_DEVID,0
BARO2_GND_PRESS,0
BARO2_WCF_ENABLE,0
BARO3_DEVID,0
BARO3_GND_PRESS,0
BARO3_WCF_ENABLE,0
BATT_AMP_OFFSET,0
BATT_AMP_PERVLT,40
BATT_ARM_MAH,0
BATT_ARM_VOLT,11
BATT_CAPACITY,3300
BATT_CRT_MAH,0
BATT_CRT_VOLT,10.2
BATT_CURR_PIN,11
BATT_FS_CRT_ACT,0
BATT_FS_LOW_ACT,0
BATT_FS_VOLTSRC,0
BATT_LOW_MAH,0
BATT_LOW_TIMER,10
BATT_LOW_VOLT,10.5
BATT_MONITOR,4
BATT_OPTIONS,0
BATT_SERIAL_NUM,-1
BATT_VLT_OFFSET,0
BATT_VOLT_MULT,11
BATT_VOLT_PIN,10
BATT2_MONITOR,0
BATT3_MONITOR,0
BATT4_MONITOR,0
BATT5_MONITOR,0
BATT6_MONITOR,0
BATT7_MONITOR,0
BATT8_MONITOR,0
BATT9_MONITOR,0
BCN_TYPE,0
BRD_ALT_CONFIG,1
BRD_BOOT_DELAY,0
BRD_OPTIONS,1
BRD_RTC_TYPES,1
BRD_RTC_TZ_MIN,0
BRD_SAFETY_MASK,16368
BRD_SAFETYENABLE,0
BRD_SAFETYOPTION,3
BRD_SD_SLOWDOWN,0
BRD_SERIAL_NUM,0
BTN_ENABLE,0
CAM_AUTO_ONLY,0
CAM_DURATION,10
CAM_FEEDBACK_PIN,-1
CAM_FEEDBACK_POL,1
CAM_MAX_ROLL,0
CAM_MIN_INTERVAL,0
CAM_RC_TYPE,0
CAM_RELAY_ON,1
CAM_SERVO_OFF,1100
CAM_SERVO_ON,1300
CAM_TRIGG_DIST,0
CAM_TRIGG_TYPE,0
CAM_TYPE,0
CHUTE_ENABLED,0
CIRCLE_OPTIONS,1
CIRCLE_RADIUS,1000
CIRCLE_RATE,20
COMPASS_AUTO_ROT,2
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,0
COMPASS_DEV_ID,0
COMPASS_DEV_ID2,0
COMPASS_DEV_ID3,0
COMPASS_DEV_ID4,0
COMPASS_DEV_ID5,0
COMPASS_DEV_ID6,0
COMPASS_DEV_ID7,0
COMPASS_DEV_ID8,0
COMPASS_DIA_X,0.9605926
COMPASS_DIA_Y,0.9862489
COMPASS_DIA_Z,1.08186
COMPASS_DIA2_X,1
COMPASS_DIA2_Y,1
COMPASS_DIA2_Z,1
COMPASS_DIA3_X,1
COMPASS_DIA3_Y,1
COMPASS_DIA3_Z,1
COMPASS_ENABLE,1
COMPASS_EXTERN2,0
COMPASS_EXTERN3,0
COMPASS_EXTERNAL,0
COMPASS_FLTR_RNG,0
COMPASS_LEARN,0
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,-0.007227792
COMPASS_ODI_Y,-0.002758821
COMPASS_ODI_Z,-0.009316941
COMPASS_ODI2_X,0
COMPASS_ODI2_Y,0
COMPASS_ODI2_Z,0
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFFS_MAX,1800
COMPASS_OFS_X,218.8588
COMPASS_OFS_Y,191.6815
COMPASS_OFS_Z,-237.3717
COMPASS_OFS2_X,0
COMPASS_OFS2_Y,0
COMPASS_OFS2_Z,0
COMPASS_OFS3_X,0
COMPASS_OFS3_Y,0
COMPASS_OFS3_Z,0
COMPASS_OPTIONS,0
COMPASS_ORIENT,4
COMPASS_ORIENT2,0
COMPASS_ORIENT3,0
COMPASS_PMOT_EN,0
COMPASS_PRIO1_ID,466441
COMPASS_PRIO2_ID,0
COMPASS_PRIO3_ID,0
COMPASS_SCALE,0
COMPASS_SCALE2,0
COMPASS_SCALE3,0
COMPASS_TYPEMASK,0
COMPASS_USE,1
COMPASS_USE2,1
COMPASS_USE3,1
CUST_ROT_ENABLE,0
DEV_OPTIONS,0
DISARM_DELAY,10
EAHRS_TYPE,0
EFI_TYPE,0
EK2_ENABLE,0
EK3_ABIAS_P_NSE,0.003
EK3_ACC_BIAS_LIM,1
EK3_ACC_P_NSE,0.35
EK3_AFFINITY,0
EK3_ALT_M_NSE,2
EK3_BCN_DELAY,50
EK3_BCN_I_GTE,500
EK3_BCN_M_NSE,1
EK3_BETA_MASK,0
EK3_CHECK_SCALE,100
EK3_DRAG_BCOEF_X,0
EK3_DRAG_BCOEF_Y,0
EK3_DRAG_M_NSE,0.5
EK3_DRAG_MCOEF,0
EK3_EAS_I_GATE,400
EK3_EAS_M_NSE,1.4
EK3_ENABLE,1
EK3_ERR_THRESH,0.2
EK3_FLOW_DELAY,10
EK3_FLOW_I_GATE,300
EK3_FLOW_M_NSE,0.25
EK3_FLOW_USE,1
EK3_GBIAS_P_NSE,0.001
EK3_GLITCH_RAD,25
EK3_GND_EFF_DZ,4
EK3_GPS_CHECK,31
EK3_GPS_VACC_MAX,0
EK3_GSF_RST_MAX,2
EK3_GSF_RUN_MASK,3
EK3_GSF_USE_MASK,3
EK3_GYRO_P_NSE,0.015
EK3_HGT_DELAY,60
EK3_HGT_I_GATE,500
EK3_HRT_FILT,2
EK3_IMU_MASK,3
EK3_LOG_LEVEL,0
EK3_MAG_CAL,3
EK3_MAG_EF_LIM,50
EK3_MAG_I_GATE,300
EK3_MAG_M_NSE,0.05
EK3_MAG_MASK,0
EK3_MAGB_P_NSE,0.0001
EK3_MAGE_P_NSE,0.001
EK3_MAX_FLOW,2.5
EK3_NOAID_M_NSE,10
EK3_OGN_HGT_MASK,0
EK3_OGNM_TEST_SF,2
EK3_POS_I_GATE,500
EK3_POSNE_M_NSE,0.5
EK3_PRIMARY,0
EK3_RNG_I_GATE,500
EK3_RNG_M_NSE,0.5
EK3_RNG_USE_HGT,-1
EK3_RNG_USE_SPD,2
EK3_SRC_OPTIONS,1
EK3_SRC1_POSXY,3
EK3_SRC1_POSZ,1
EK3_SRC1_VELXY,3
EK3_SRC1_VELZ,3
EK3_SRC1_YAW,1
EK3_SRC2_POSXY,0
EK3_SRC2_POSZ,1
EK3_SRC2_VELXY,0
EK3_SRC2_VELZ,0
EK3_SRC2_YAW,0
EK3_SRC3_POSXY,0
EK3_SRC3_POSZ,1
EK3_SRC3_VELXY,0
EK3_SRC3_VELZ,0
EK3_SRC3_YAW,0
EK3_TAU_OUTPUT,25
EK3_TERR_GRAD,0.1
EK3_VEL_I_GATE,500
EK3_VELD_M_NSE,0.5
EK3_VELNE_M_NSE,0.3
EK3_VIS_VERR_MAX,0.9
EK3_VIS_VERR_MIN,0.1
EK3_WENC_VERR,0.1
EK3_WIND_P_NSE,0.2
EK3_WIND_PSCALE,1
EK3_YAW_I_GATE,300
EK3_YAW_M_NSE,0.5
ESC_CALIBRATION,0
ESC_TLM_MAV_OFS,0
FENCE_ACTION,1
FENCE_ALT_MAX,100
FENCE_ALT_MIN,-10
FENCE_ENABLE,0
FENCE_MARGIN,2
FENCE_RADIUS,300
FENCE_TOTAL,0
FENCE_TYPE,7
FFT_ENABLE,0
FHLD_BRAKE_RATE,8
FHLD_FILT_HZ,5
FHLD_FLOW_MAX,0.6
FHLD_QUAL_MIN,10
FHLD_XY_FILT_HZ,5
FHLD_XY_I,0.3
FHLD_XY_IMAX,3000
FHLD_XY_P,0.2
FLIGHT_OPTIONS,0
FLOW_TYPE,0
FLTMODE_CH,6
FLTMODE1,0
FLTMODE2,2
FLTMODE3,16
FLTMODE4,1
FLTMODE5,16
FLTMODE6,3
FOLL_ENABLE,0
FORMAT_VERSION,120
FRAME_CLASS,1
FRAME_TYPE,18
FRSKY_DNLINK_ID,27
FRSKY_DNLINK1_ID,20
FRSKY_DNLINK2_ID,7
FRSKY_OPTIONS,0
FRSKY_UPLINK_ID,13
FS_CRASH_CHECK,1
FS_DR_ENABLE,2
FS_DR_TIMEOUT,30
FS_EKF_ACTION,1
FS_EKF_THRESH,0.8
FS_GCS_ENABLE,0
FS_GCS_TIMEOUT,5
FS_OPTIONS,16
FS_THR_ENABLE,1
FS_THR_VALUE,975
FS_VIBE_ENABLE,1
GCS_PID_MASK,0
GEN_TYPE,0
GND_EFFECT_COMP,1
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_BLEND_TC,10
GPS_COM_PORT,1
GPS_COM_PORT2,1
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_DRV_OPTIONS,0
GPS_GNSS_MODE,0
GPS_GNSS_MODE2,0
GPS_HDOP_GOOD,140
GPS_INJECT_TO,127
GPS_MB1_TYPE,0
GPS_MB2_TYPE,0
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_PRIMARY,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_SBP_LOGMASK,-256
GPS_TYPE,1
GPS_TYPE2,0
GRIP_ENABLE,0
GUID_OPTIONS,0
GUID_TIMEOUT,3
INITIAL_MODE,0
INS_ACC_BODYFIX,2
INS_ACC_ID,3670282
INS_ACC1_CALTEMP,40.374
INS_ACC2_CALTEMP,40.774
INS_ACC2_ID,3670306
INS_ACC2OFFS_X,-0.01750826
INS_ACC2OFFS_Y,-0.1721221
INS_ACC2OFFS_Z,-0.04073729
INS_ACC2SCAL_X,0.9971188
INS_ACC2SCAL_Y,0.9949722
INS_ACC2SCAL_Z,0.9900855
INS_ACCEL_FILTER,20
INS_ACCOFFS_X,-0.07343487
INS_ACCOFFS_Y,0.04231778
INS_ACCOFFS_Z,-0.1495923
INS_ACCSCAL_X,0.9942622
INS_ACCSCAL_Y,0.9970815
INS_ACCSCAL_Z,0.9923326
INS_ENABLE_MASK,127
INS_FAST_SAMPLE,1
INS_GYR_CAL,1
INS_GYR_ID,3670282
INS_GYR1_CALTEMP,14.974
INS_GYR2_CALTEMP,15.11
INS_GYR2_ID,3670306
INS_GYR2OFFS_X,-0.001226239
INS_GYR2OFFS_Y,-0.007802478
INS_GYR2OFFS_Z,-0.001315612
INS_GYRO_FILTER,75
INS_GYRO_RATE,1
INS_GYROFFS_X,0.003719179
INS_GYROFFS_Y,0.002274198
INS_GYROFFS_Z,-6.186905E-05
INS_HNTC2_ENABLE,0
INS_HNTCH_ENABLE,0
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
INS_POS1_X,0
INS_POS1_Y,0
INS_POS1_Z,0
INS_POS2_X,0
INS_POS2_Y,0
INS_POS2_Z,0
INS_STILL_THRESH,2.5
INS_TCAL_OPTIONS,0
INS_TCAL1_ENABLE,0
INS_TCAL2_ENABLE,0
INS_TRIM_OPTION,1
INS_USE,1
INS_USE2,1
LAND_ALT_LOW,1000
LAND_REPOSITION,1
LAND_SPEED,50
LAND_SPEED_HIGH,0
LGR_ENABLE,0
LOG_BACKEND_TYPE,4
LOG_BITMASK,141310
LOG_BLK_RATEMAX,0
LOG_DISARMED,3
LOG_FILE_BUFSIZE,4
LOG_FILE_DSRMROT,0
LOG_FILE_MB_FREE,500
LOG_FILE_RATEMAX,0
LOG_FILE_TIMEOUT,5
LOG_MAV_BUFSIZE,8
LOG_MAV_RATEMAX,0
LOG_REPLAY,0
LOIT_ACC_MAX,500
LOIT_ANG_MAX,0
LOIT_BRK_ACCEL,250
LOIT_BRK_DELAY,1
LOIT_BRK_JERK,500
LOIT_SPEED,1250
MIS_OPTIONS,0
MIS_RESTART,0
MIS_TOTAL,0
MNT1_TYPE,0
MNT2_TYPE,0
MOT_BAT_CURR_MAX,0
MOT_BAT_CURR_TC,5
MOT_BAT_IDX,0
MOT_BAT_VOLT_MAX,12.6
MOT_BAT_VOLT_MIN,9.6
MOT_BOOST_SCALE,0
MOT_HOVER_LEARN,2
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_PWM_TYPE,6
MOT_SAFE_DISARM,0
MOT_SAFE_TIME,1
MOT_SLEW_DN_TIME,0
MOT_SLEW_UP_TIME,0
MOT_SPIN_ARM,0.1
MOT_SPIN_MAX,0.95
MOT_SPIN_MIN,0.15
MOT_SPOOL_TIME,0.5
MOT_THST_EXPO,0.55
MOT_THST_HOVER,0.2
MOT_YAW_HEADROOM,200
MSP_OPTIONS,0
MSP_OSD_NCELLS,0
NTF_BUZZ_ON_LVL,1
NTF_BUZZ_PIN,80
NTF_BUZZ_TYPES,1
NTF_BUZZ_VOLUME,100
NTF_DISPLAY_TYPE,0
NTF_LED_BRIGHT,3
NTF_LED_LEN,1
NTF_LED_OVERRIDE,0
NTF_LED_TYPES,199
OA_TYPE,0
OSD_ARM_SCR,0
OSD_BTN_DELAY,300
OSD_CELL_COUNT,-1
OSD_CHAN,0
OSD_DSARM_SCR,0
OSD_FONT,0
OSD_FS_SCR,0
OSD_H_OFFSET,32
OSD_MSG_TIME,10
OSD_OPTIONS,1
OSD_SW_METHOD,0
OSD_TYPE,1
OSD_UNITS,0
OSD_V_OFFSET,16
OSD_W_AVGCELLV,3.6
OSD_W_BATVOLT,10
OSD_W_NSAT,9
OSD_W_RESTVOLT,10
OSD_W_RSSI,30
OSD1_ALTITUDE_EN,1
OSD1_ALTITUDE_X,23
OSD1_ALTITUDE_Y,8
OSD1_ARMING_EN,1
OSD1_ARMING_X,1
OSD1_ARMING_Y,1
OSD1_ASPD1_EN,0
OSD1_ASPD1_X,0
OSD1_ASPD1_Y,0
OSD1_ASPD2_EN,0
OSD1_ASPD2_X,0
OSD1_ASPD2_Y,0
OSD1_ASPEED_EN,0
OSD1_ASPEED_X,2
OSD1_ASPEED_Y,13
OSD1_ATEMP_EN,0
OSD1_ATEMP_X,0
OSD1_ATEMP_Y,0
OSD1_AVGCELLV_EN,0
OSD1_AVGCELLV_X,24
OSD1_AVGCELLV_Y,3
OSD1_BAT_VOLT_EN,1
OSD1_BAT_VOLT_X,24
OSD1_BAT_VOLT_Y,1
OSD1_BAT2_VLT_EN,0
OSD1_BAT2_VLT_X,0
OSD1_BAT2_VLT_Y,0
OSD1_BAT2USED_EN,0
OSD1_BAT2USED_X,0
OSD1_BAT2USED_Y,0
OSD1_BATTBAR_EN,1
OSD1_BATTBAR_X,1
OSD1_BATTBAR_Y,1
OSD1_BATUSED_EN,1
OSD1_BATUSED_X,23
OSD1_BATUSED_Y,3
OSD1_BTEMP_EN,0
OSD1_BTEMP_X,0
OSD1_BTEMP_Y,0
OSD1_CELLVOLT_EN,1
OSD1_CELLVOLT_X,1
OSD1_CELLVOLT_Y,1
OSD1_CHAN_MAX,2100
OSD1_CHAN_MIN,900
OSD1_CLIMBEFF_EN,0
OSD1_CLIMBEFF_X,0
OSD1_CLIMBEFF_Y,0
OSD1_CLK_EN,0
OSD1_CLK_X,0
OSD1_CLK_Y,0
OSD1_COMPASS_EN,1
OSD1_COMPASS_X,15
OSD1_COMPASS_Y,3
OSD1_CRSSHAIR_EN,0
OSD1_CRSSHAIR_X,0
OSD1_CRSSHAIR_Y,0
OSD1_CURRENT_EN,1
OSD1_CURRENT_X,25
OSD1_CURRENT_Y,2
OSD1_CURRENT2_EN,0
OSD1_CURRENT2_X,0
OSD1_CURRENT2_Y,0
OSD1_DIST_EN,0
OSD1_DIST_X,22
OSD1_DIST_Y,11
OSD1_EFF_EN,0
OSD1_EFF_X,22
OSD1_EFF_Y,10
OSD1_ENABLE,1
OSD1_ESCAMPS_EN,0
OSD1_ESCAMPS_X,24
OSD1_ESCAMPS_Y,14
OSD1_ESCRPM_EN,0
OSD1_ESCRPM_X,22
OSD1_ESCRPM_Y,12
OSD1_ESCTEMP_EN,0
OSD1_ESCTEMP_X,24
OSD1_ESCTEMP_Y,13
OSD1_FENCE_EN,0
OSD1_FENCE_X,14
OSD1_FENCE_Y,9
OSD1_FLTIME_EN,0
OSD1_FLTIME_X,23
OSD1_FLTIME_Y,10
OSD1_FLTMODE_EN,1
OSD1_FLTMODE_X,2
OSD1_FLTMODE_Y,8
OSD1_FONT,0
OSD1_GPSLAT_EN,1
OSD1_GPSLAT_X,9
OSD1_GPSLAT_Y,13
OSD1_GPSLONG_EN,1
OSD1_GPSLONG_X,9
OSD1_GPSLONG_Y,14
OSD1_GSPEED_EN,1
OSD1_GSPEED_X,2
OSD1_GSPEED_Y,14
OSD1_HDOP_EN,0
OSD1_HDOP_X,0
OSD1_HDOP_Y,0
OSD1_HEADING_EN,1
OSD1_HEADING_X,13
OSD1_HEADING_Y,2
OSD1_HOME_EN,1
OSD1_HOME_X,14
OSD1_HOME_Y,1
OSD1_HOMEDIR_EN,1
OSD1_HOMEDIR_X,1
OSD1_HOMEDIR_Y,1
OSD1_HOMEDIST_EN,1
OSD1_HOMEDIST_X,1
OSD1_HOMEDIST_Y,1
OSD1_HORIZON_EN,1
OSD1_HORIZON_X,14
OSD1_HORIZON_Y,8
OSD1_LINK_Q_EN,0
OSD1_LINK_Q_X,1
OSD1_LINK_Q_Y,1
OSD1_MESSAGE_EN,1
OSD1_MESSAGE_X,2
OSD1_MESSAGE_Y,6
OSD1_PITCH_EN,0
OSD1_PITCH_X,0
OSD1_PITCH_Y,0
OSD1_PLUSCODE_EN,0
OSD1_PLUSCODE_X,0
OSD1_PLUSCODE_Y,0
OSD1_POWER_EN,1
OSD1_POWER_X,1
OSD1_POWER_Y,1
OSD1_RESTVOLT_EN,0
OSD1_RESTVOLT_X,24
OSD1_RESTVOLT_Y,2
OSD1_RNGF_EN,0
OSD1_RNGF_X,0
OSD1_RNGF_Y,0
OSD1_ROLL_EN,0
OSD1_ROLL_X,0
OSD1_ROLL_Y,0
OSD1_RSSI_EN,1
OSD1_RSSI_X,1
OSD1_RSSI_Y,1
OSD1_SATS_EN,1
OSD1_SATS_X,1
OSD1_SATS_Y,3
OSD1_SIDEBARS_EN,0
OSD1_SIDEBARS_X,4
OSD1_SIDEBARS_Y,5
OSD1_STATS_EN,0
OSD1_STATS_X,0
OSD1_STATS_Y,0
OSD1_TEMP_EN,0
OSD1_TEMP_X,0
OSD1_TEMP_Y,0
OSD1_THROTTLE_EN,1
OSD1_THROTTLE_X,24
OSD1_THROTTLE_Y,11
OSD1_TXT_RES,0
OSD1_VSPEED_EN,1
OSD1_VSPEED_X,24
OSD1_VSPEED_Y,9
OSD1_VTX_PWR_EN,0
OSD1_VTX_PWR_X,0
OSD1_VTX_PWR_Y,0
OSD1_WAYPOINT_EN,0
OSD1_WAYPOINT_X,0
OSD1_WAYPOINT_Y,0
OSD1_WIND_EN,0
OSD1_WIND_X,2
OSD1_WIND_Y,12
OSD1_XTRACK_EN,0
OSD1_XTRACK_X,0
OSD1_XTRACK_Y,0
OSD2_ENABLE,0
OSD2_FONT,0
OSD2_LINK_Q_EN,0
OSD2_LINK_Q_X,1
OSD2_LINK_Q_Y,1
OSD2_TXT_RES,0
OSD3_ENABLE,0
OSD3_FONT,0
OSD3_LINK_Q_EN,0
OSD3_LINK_Q_X,1
OSD3_LINK_Q_Y,1
OSD3_TXT_RES,0
OSD4_ENABLE,0
OSD4_FONT,0
OSD4_LINK_Q_EN,0
OSD4_LINK_Q_X,1
OSD4_LINK_Q_Y,1
OSD4_TXT_RES,0
OSD5_ENABLE,0
OSD6_ENABLE,0
PHLD_BRAKE_ANGLE,3000
PHLD_BRAKE_RATE,8
PILOT_ACCEL_Z,250
PILOT_SPEED_DN,0
PILOT_SPEED_UP,250
PILOT_THR_BHV,0
PILOT_THR_FILT,0
PILOT_TKOFF_ALT,0
PILOT_Y_EXPO,0
PILOT_Y_RATE,202.5
PILOT_Y_RATE_TC,0
PLND_ENABLED,0
PRX_FILT,0.25
PRX_IGN_GND,0
PRX_LOG_RAW,0
PRX1_TYPE,0
PRX2_TYPE,0
PRX3_TYPE,0
PSC_ACCZ_D,0
PSC_ACCZ_FF,0
PSC_ACCZ_FLTD,0
PSC_ACCZ_FLTE,20
PSC_ACCZ_FLTT,0
PSC_ACCZ_I,1
PSC_ACCZ_IMAX,800
PSC_ACCZ_P,0.5
PSC_ACCZ_SMAX,0
PSC_ANGLE_MAX,0
PSC_JERK_XY,5
PSC_JERK_Z,5
PSC_POSXY_P,1
PSC_POSZ_P,1
PSC_VELXY_D,0.5
PSC_VELXY_FF,0
PSC_VELXY_FLTD,5
PSC_VELXY_FLTE,5
PSC_VELXY_I,1
PSC_VELXY_IMAX,1000
PSC_VELXY_P,2
PSC_VELZ_D,0
PSC_VELZ_FF,0
PSC_VELZ_FLTD,5
PSC_VELZ_FLTE,5
PSC_VELZ_I,0
PSC_VELZ_IMAX,1000
PSC_VELZ_P,5
RALLY_INCL_HOME,1
RALLY_LIMIT_KM,0.3
RALLY_TOTAL,0
RC_OPTIONS,544
RC_OVERRIDE_TIME,3
RC_PROTOCOLS,1
RC_SPEED,490
RC1_DZ,20
RC1_MAX,2011
RC1_MIN,988
RC1_OPTION,0
RC1_REVERSED,0
RC1_TRIM,1501
RC10_DZ,0
RC10_MAX,1900
RC10_MIN,1100
RC10_OPTION,0
RC10_REVERSED,0
RC10_TRIM,1500
RC11_DZ,0
RC11_MAX,1900
RC11_MIN,1100
RC11_OPTION,0
RC11_REVERSED,0
RC11_TRIM,1500
RC12_DZ,0
RC12_MAX,1900
RC12_MIN,1100
RC12_OPTION,0
RC12_REVERSED,0
RC12_TRIM,1500
RC13_DZ,0
RC13_MAX,1900
RC13_MIN,1100
RC13_OPTION,0
RC13_REVERSED,0
RC13_TRIM,1500
RC14_DZ,0
RC14_MAX,1900
RC14_MIN,1100
RC14_OPTION,0
RC14_REVERSED,0
RC14_TRIM,1500
RC15_DZ,0
RC15_MAX,2011
RC15_MIN,2001
RC15_OPTION,0
RC15_REVERSED,0
RC15_TRIM,2011
RC16_DZ,0
RC16_MAX,2011
RC16_MIN,1920
RC16_OPTION,0
RC16_REVERSED,0
RC16_TRIM,2011
RC2_DZ,20
RC2_MAX,2011
RC2_MIN,988
RC2_OPTION,0
RC2_REVERSED,0
RC2_TRIM,1496
RC3_DZ,30
RC3_MAX,2011
RC3_MIN,988
RC3_OPTION,0
RC3_REVERSED,0
RC3_TRIM,988
RC4_DZ,20
RC4_MAX,2011
RC4_MIN,988
RC4_OPTION,0
RC4_REVERSED,0
RC4_TRIM,1499
RC5_DZ,0
RC5_MAX,1900
RC5_MIN,1100
RC5_OPTION,0
RC5_REVERSED,0
RC5_TRIM,1500
RC6_DZ,0
RC6_MAX,1779
RC6_MIN,1219
RC6_OPTION,0
RC6_REVERSED,0
RC6_TRIM,1526
RC7_DZ,0
RC7_MAX,1779
RC7_MIN,1219
RC7_OPTION,94
RC7_REVERSED,0
RC7_TRIM,1219
RC8_DZ,0
RC8_MAX,2000
RC8_MIN,999
RC8_OPTION,154
RC8_REVERSED,0
RC8_TRIM,999
RC9_DZ,0
RC9_MAX,2000
RC9_MIN,999
RC9_OPTION,4
RC9_REVERSED,0
RC9_TRIM,999
RCMAP_PITCH,2
RCMAP_ROLL,1
RCMAP_THROTTLE,3
RCMAP_YAW,4
RELAY_DEFAULT,0
RELAY_PIN,-1
RELAY_PIN2,-1
RELAY_PIN3,-1
RELAY_PIN4,-1
RELAY_PIN5,-1
RELAY_PIN6,-1
RNGFND_FILT,0.5
RNGFND1_TYPE,0
RNGFND2_TYPE,0
RNGFND3_TYPE,0
RNGFND4_TYPE,0
RNGFND5_TYPE,0
RNGFND6_TYPE,0
RNGFND7_TYPE,0
RNGFND8_TYPE,0
RNGFND9_TYPE,0
RNGFNDA_TYPE,0
RPM1_TYPE,0
RPM2_TYPE,0
RSSI_ANA_PIN,8
RSSI_CHAN_HIGH,2000
RSSI_CHAN_LOW,1000
RSSI_CHANNEL,0
RSSI_PIN_HIGH,5
RSSI_PIN_LOW,0
RSSI_TYPE,3
RTL_ALT,1500
RTL_ALT_FINAL,0
RTL_ALT_TYPE,0
RTL_CLIMB_MIN,0
RTL_CONE_SLOPE,3
RTL_LOIT_TIME,5000
RTL_OPTIONS,0
RTL_SPEED,0
SCHED_DEBUG,0
SCHED_LOOP_RATE,400
SCHED_OPTIONS,0
SERIAL_PASS1,0
SERIAL_PASS2,-1
SERIAL_PASSTIMO,15
SERIAL0_BAUD,115
SERIAL0_PROTOCOL,2
SERIAL1_BAUD,115
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,23
SERIAL2_BAUD,57
SERIAL2_OPTIONS,0
SERIAL2_PROTOCOL,5
SERIAL3_BAUD,38
SERIAL3_OPTIONS,4
SERIAL3_PROTOCOL,44
SERIAL4_BAUD,38
SERIAL4_OPTIONS,0
SERIAL4_PROTOCOL,5
SERIAL5_BAUD,57
SERIAL5_OPTIONS,0
SERIAL5_PROTOCOL,-1
SERIAL6_BAUD,57
SERIAL6_OPTIONS,0
SERIAL6_PROTOCOL,-1
SERIAL7_BAUD,57
SERIAL7_OPTIONS,0
SERIAL7_PROTOCOL,-1
SERIAL8_BAUD,57
SERIAL8_OPTIONS,0
SERIAL8_PROTOCOL,-1
SERVO_32_ENABLE,0
SERVO_BLH_3DMASK,0
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,0
SERVO_BLH_DEBUG,0
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,6
SERVO_BLH_POLES,12
SERVO_BLH_PORT,0
SERVO_BLH_RVMASK,0
SERVO_BLH_TEST,0
SERVO_BLH_TMOUT,0
SERVO_BLH_TRATE,10
SERVO_DSHOT_ESC,2
SERVO_DSHOT_RATE,0
SERVO_FTW_MASK,0
SERVO_FTW_POLES,14
SERVO_FTW_RVMASK,0
SERVO_GPIO_MASK,0
SERVO_RATE,50
SERVO_ROB_POSMAX,4095
SERVO_ROB_POSMIN,0
SERVO_SBUS_RATE,50
SERVO_VOLZ_MASK,0
SERVO1_FUNCTION,33
SERVO1_MAX,2000
SERVO1_MIN,1000
SERVO1_REVERSED,0
SERVO1_TRIM,1000
SERVO10_FUNCTION,0
SERVO10_MAX,1900
SERVO10_MIN,1100
SERVO10_REVERSED,0
SERVO10_TRIM,1500
SERVO11_FUNCTION,0
SERVO11_MAX,1900
SERVO11_MIN,1100
SERVO11_REVERSED,0
SERVO11_TRIM,1500
SERVO12_FUNCTION,0
SERVO12_MAX,1900
SERVO12_MIN,1100
SERVO12_REVERSED,0
SERVO12_TRIM,1500
SERVO13_FUNCTION,0
SERVO13_MAX,1900
SERVO13_MIN,1100
SERVO13_REVERSED,0
SERVO13_TRIM,1500
SERVO14_FUNCTION,0
SERVO14_MAX,1900
SERVO14_MIN,1100
SERVO14_REVERSED,0
SERVO14_TRIM,1500
SERVO15_FUNCTION,0
SERVO15_MAX,1900
SERVO15_MIN,1100
SERVO15_REVERSED,0
SERVO15_TRIM,1500
SERVO16_FUNCTION,0
SERVO16_MAX,1900
SERVO16_MIN,1100
SERVO16_REVERSED,0
SERVO16_TRIM,1500
SERVO2_FUNCTION,34
SERVO2_MAX,2000
SERVO2_MIN,1000
SERVO2_REVERSED,0
SERVO2_TRIM,1000
SERVO3_FUNCTION,35
SERVO3_MAX,2000
SERVO3_MIN,1000
SERVO3_REVERSED,0
SERVO3_TRIM,1000
SERVO4_FUNCTION,36
SERVO4_MAX,2000
SERVO4_MIN,1000
SERVO4_REVERSED,0
SERVO4_TRIM,1000
SERVO5_FUNCTION,-1
SERVO5_MAX,1900
SERVO5_MIN,1100
SERVO5_REVERSED,0
SERVO5_TRIM,1500
SERVO6_FUNCTION,0
SERVO6_MAX,1900
SERVO6_MIN,1100
SERVO6_REVERSED,0
SERVO6_TRIM,1500
SERVO7_FUNCTION,0
SERVO7_MAX,1900
SERVO7_MIN,1100
SERVO7_REVERSED,0
SERVO7_TRIM,1500
SERVO8_FUNCTION,0
SERVO8_MAX,1900
SERVO8_MIN,1100
SERVO8_REVERSED,0
SERVO8_TRIM,1500
SERVO9_FUNCTION,0
SERVO9_MAX,1900
SERVO9_MIN,1100
SERVO9_REVERSED,0
SERVO9_TRIM,1500
SID_AXIS,0
SIMPLE,0
SPRAY_ENABLE,0
SR0_ADSB,0
SR0_EXT_STAT,2
SR0_EXTRA1,4
SR0_EXTRA2,4
SR0_EXTRA3,2
SR0_PARAMS,0
SR0_POSITION,2
SR0_RAW_CTRL,0
SR0_RAW_SENS,2
SR0_RC_CHAN,2
SR1_ADSB,0
SR1_EXT_STAT,0
SR1_EXTRA1,0
SR1_EXTRA2,0
SR1_EXTRA3,0
SR1_PARAMS,0
SR1_POSITION,0
SR1_RAW_CTRL,0
SR1_RAW_SENS,0
SR1_RC_CHAN,0
SR2_ADSB,0
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_ADSB,0
SR3_EXT_STAT,0
SR3_EXTRA1,0
SR3_EXTRA2,0
SR3_EXTRA3,0
SR3_PARAMS,0
SR3_POSITION,0
SR3_RAW_CTRL,0
SR3_RAW_SENS,0
SR3_RC_CHAN,0
SR4_ADSB,0
SR4_EXT_STAT,0
SR4_EXTRA1,0
SR4_EXTRA2,0
SR4_EXTRA3,0
SR4_PARAMS,0
SR4_POSITION,0
SR4_RAW_CTRL,0
SR4_RAW_SENS,0
SR4_RC_CHAN,0
SRTL_ACCURACY,2
SRTL_OPTIONS,0
SRTL_POINTS,300
STAT_BOOTCNT,1
STAT_FLTTIME,0
STAT_RESET,0
STAT_RUNTIME,0
SUPER_SIMPLE,0
SURFTRAK_MODE,1
SYSID_ENFORCE,0
SYSID_MYGCS,255
SYSID_THISMAV,1
TCAL_ENABLED,0
TELEM_DELAY,0
THR_DZ,100
THROW_MOT_START,0
THROW_NEXTMODE,18
THROW_TYPE,0
TKOFF_RPM_MIN,0
TKOFF_SLEW_TIME,2
TUNE,0
TUNE_MAX,0
TUNE_MIN,0
VISO_TYPE,0
VTX_BAND,4
VTX_CHANNEL,7
VTX_ENABLE,1
VTX_FREQ,5917
VTX_MAX_POWER,600
VTX_OPTIONS,1
VTX_POWER,400
WINCH_TYPE,0
WP_NAVALT_MIN,0
WP_YAW_BEHAVIOR,2
WPNAV_ACCEL,250
WPNAV_ACCEL_Z,100
WPNAV_JERK,1
WPNAV_RADIUS,200
WPNAV_RFND_USE,1
WPNAV_SPEED,1000
WPNAV_SPEED_DN,150
WPNAV_SPEED_UP,250
WPNAV_TER_MARGIN,10
ZIGZ_AUTO_ENABLE,0
3. 问题汇总
3.1 机架构型
从Betaflight过来的小伙伴请特别注意了,因为大家的ESC Motor顺序和ArduPilot原生定义是不一样的。
因此,一定要使用下面的配置参数。
FRAME_CLASS = 1 //quad
FRAME_TYPE = 18 //betaflight x reversed
3.2 IMU对齐
Betaflight和ArduPilot在IMU对齐定义上不太一样,所以配置的时候要特别注意(通常厂商如果已经合入ArduPilot代码库,一般这个问题不大;如果没有,那请注意了)。
每个IMU都要进行合理的对齐。
EK3_IMU_MASK = 3 //表示使用两个IMU硬件
比如:H743 2BMI270这块手头的板子
Betaflgiht定义
set gyro_1_sensor_align = CW90
set gyro_2_sensor_align = CW180
ArduPilot定义
IMU BMI270 SPI:bmi270_1 ROTATION_ROLL_180_YAW_90
IMU BMI270 SPI:bmi270_2 ROTATION_PITCH_180
3.3 接收机
ELRS接收机配置内容:
- 接收机协议
- 模式配置通道
- VTX功率配置通道
- 特殊功能:armdisarm/RTL
BRD_ALT_CONFIG = 1
SERIAL1_PROTOCOL = 23
SERIAL1_OPTION = 0
SERIAL1_BAUD = 115
RC_PROTOCOLS = 1
RSSI_TYPE = 3
RC_OPTIONS = 544 //RC_OPTIONS turn on Bit 9th which is “Suppress CRSF mode/rate message for ELRS systems”.
FLTMODE_CH = 6
RC7_OPTION = 94 //VTX power
RC8_OPTION = 154 //armdisarm
RC9_OPTION = 4 //RTL
RC2_REVERSED = 1 //前后方向相反,遥控或者飞控都可修改
3.4 GPS
GPS协议是会自动侦测,不用自已波特率,主要是协议选择正确即可。
SERIAL2_PROTOCOL = 5
SERIAL2_OPTION = 0 //default
SERIAL2_BAUD = 57 //default
3.5 VTX
图传配置内容:
- 图传串行控制通道&协议
- 图传通信频段
- 图传功率(pitch mode/max power)
注:这里结合RCx_OPTION通道,可以对功率进行动态设置。不过目前最大功率还不能设置,肯定是配置哪个环节没有调好。
SERIAL3_PROTOCOL = 44
SERIAL3_OPTION = 4 //halfduplex
SERIAL3_BAUD = 38 //default
VTX_ENABLE = 1
VTX_BAND = 4 //band R
VTX_CHANNEL = 7 //channel 8
VTX_FREQ = 5917 //readonly
VTX_MAX_POWER = 600 //600mw
VTX_POWER = ???? //don't care
VTX_OPTIONS = 1(默认pit模式),然后RCx_OPTION = 94
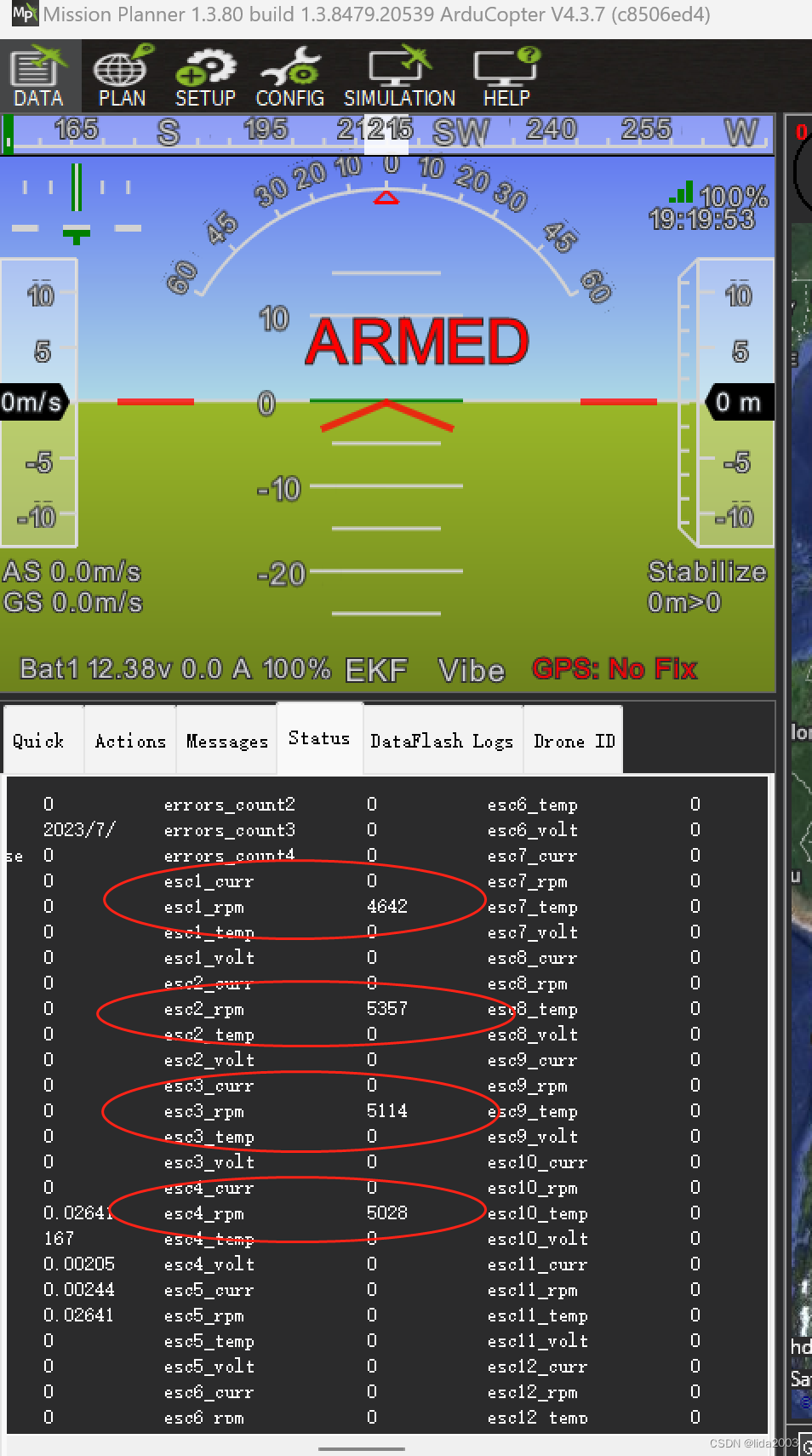
3.6 电调
DShot600配置
MOT_PWM_TYPE = 6 // Dshot600
SERVO_BLH_AUTO = 1
SERVO_BLH_POLES = 14 //磁极对数量和电机相关
SERVO_BLH_OTYPE = 6 //dshot600
SERVO_DSHOT_ESC = 2 //BLHeli_S
SERVO_DSHOT_RATE = 0 //default 1khz
SERVO_BLH_TRATE = 10 //default 10Hz
SERVO_BLH_BDMASK = 0 //default
双向DShot600增加,需要固件编译支持。
SERVO_BLH_BDMASK = 15 //bdshot
注:若需要烧录bdshot ESC固件,请参考:BLHeli32 and BLHeli_S ESCs
ESC不支持电传协议,有需要的小伙伴可以配置
SERIAL6_PROTOCOL = 16 //ESC telemetry,暂时不支持
SERIAL6_OPTION = 0
SERIAL6_BAUD = 115
3.7 电源
参考matekh743飞控配置参数。
BATT_MONITOR = 4
BATT_CURR_PIN = 11
BATT_VOLT_PIN = 10
BATT_VOLT_MULT = 10.5
BATT_AMP_PERVLT = 40
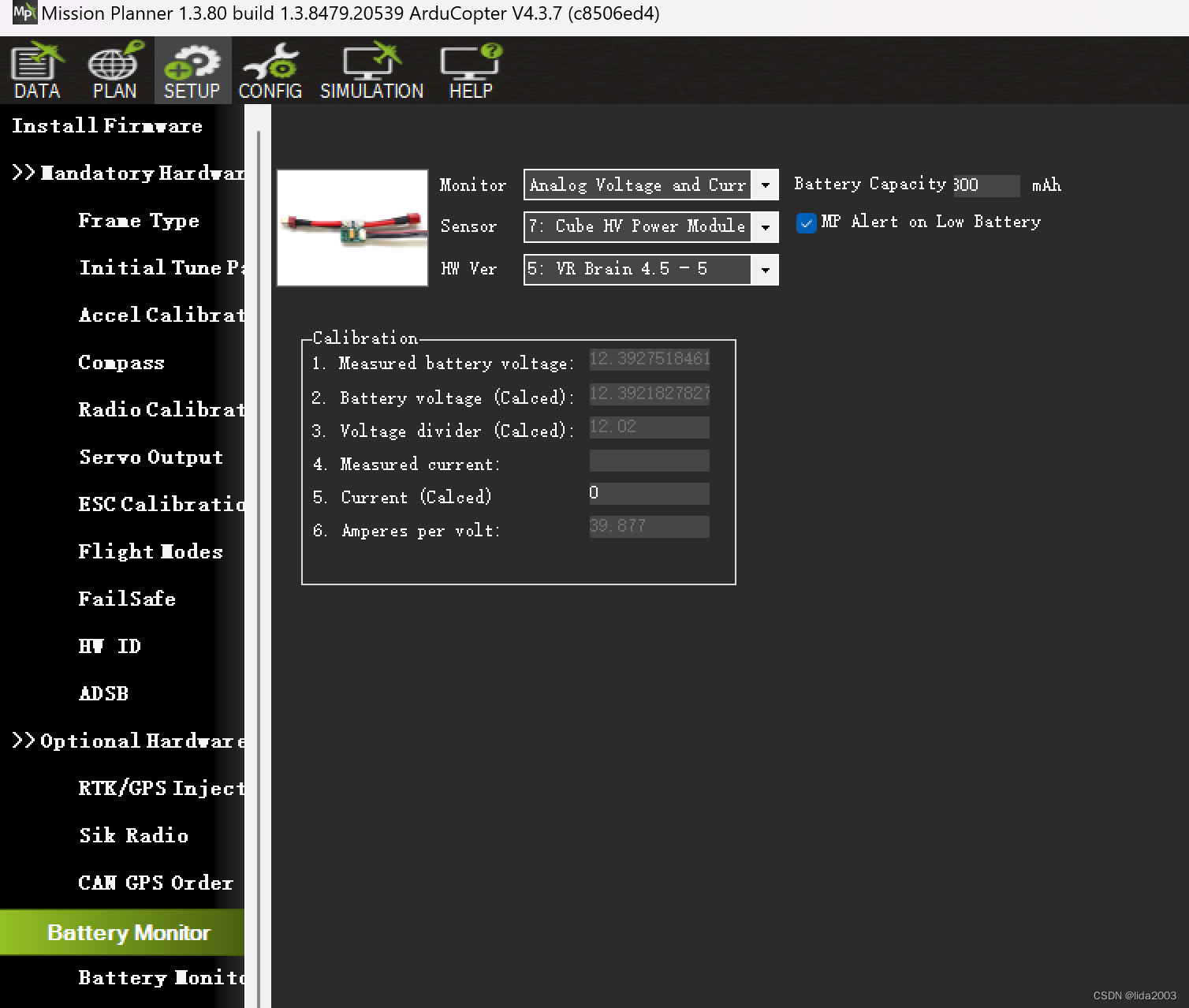
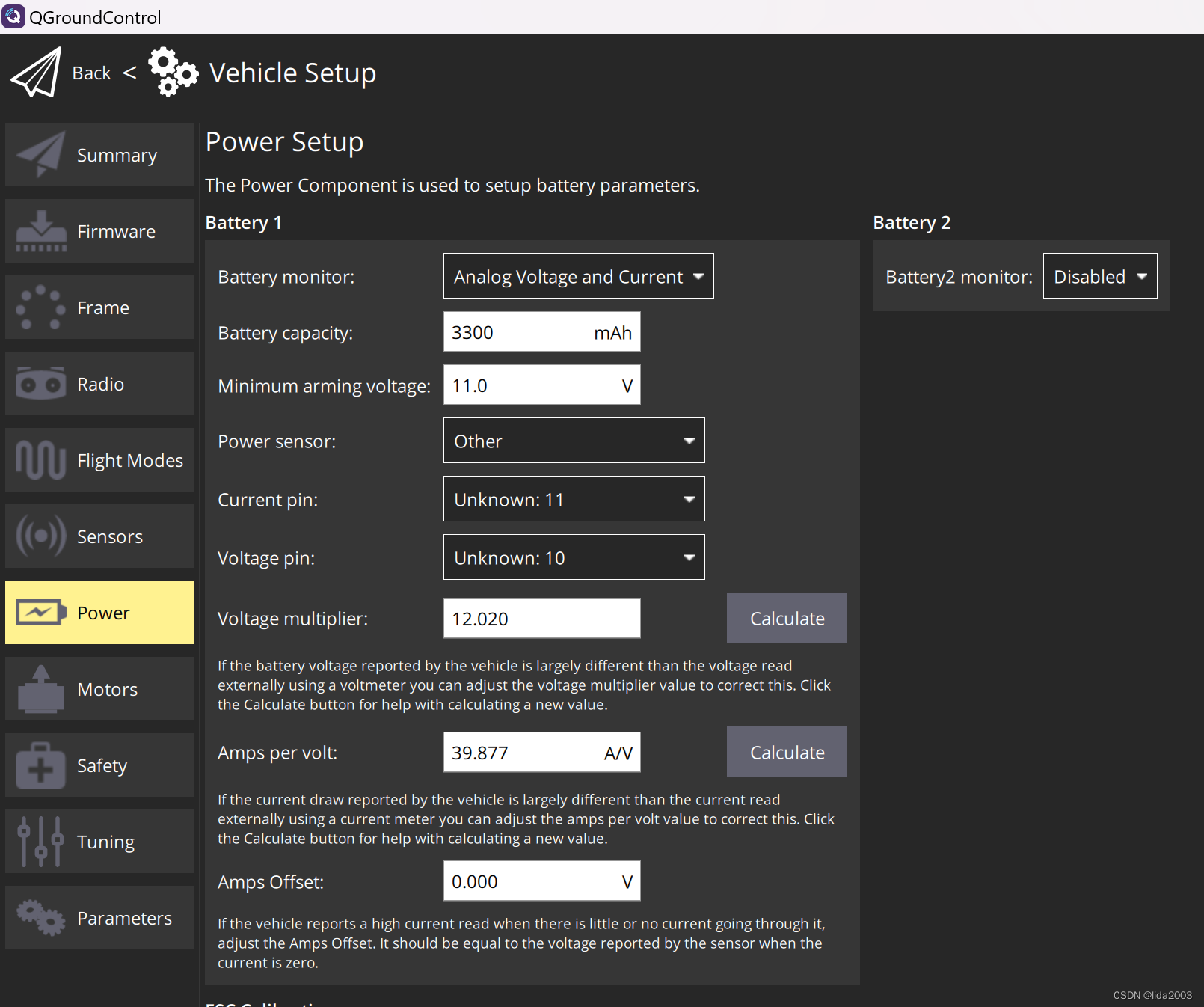
并做一个电压校准,以便显示电压正确。
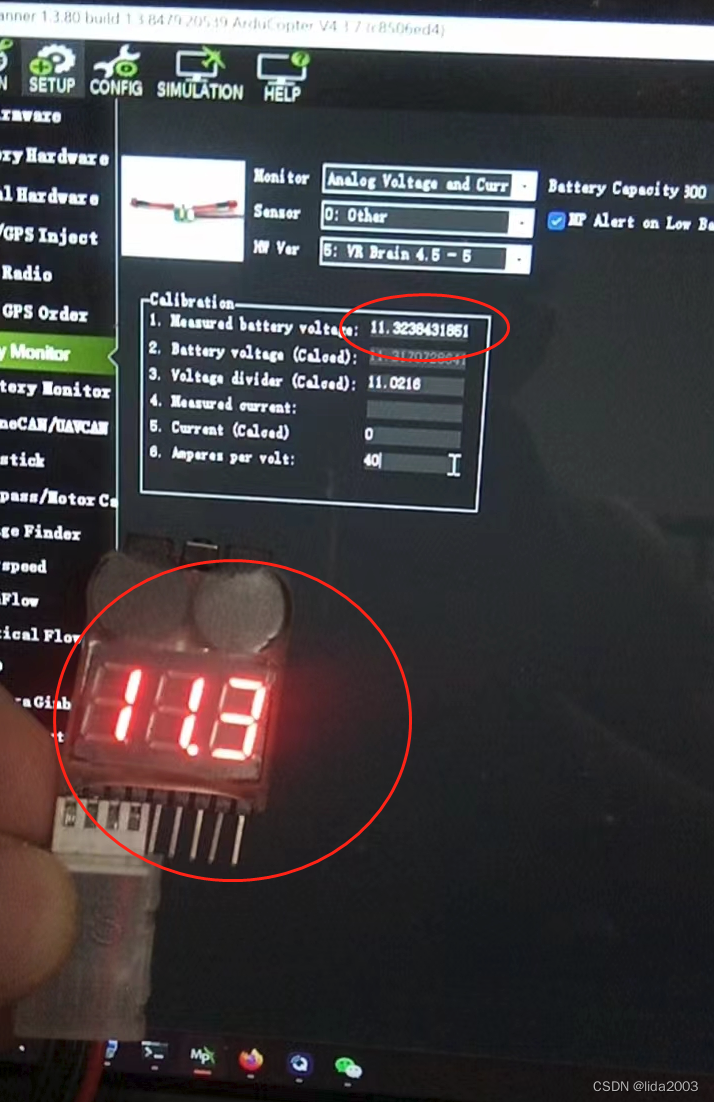
QGC软件显示如下:
3.8 PID
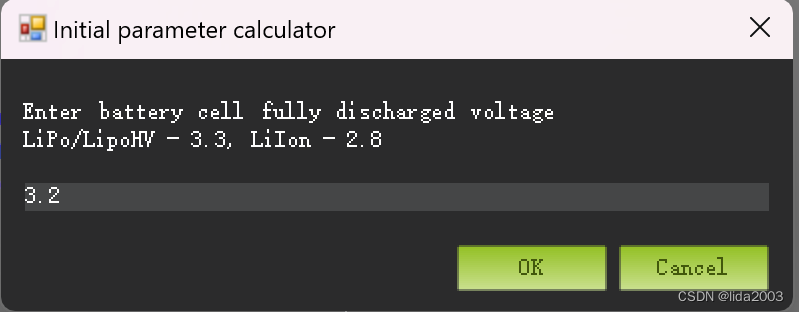
默认情况下,ArduPilot是给10寸机配置的PID参数。因此,在实际上手飞之前如果飞机尺寸不一致,请使用InitialParamsCalculator.zip插件进行初步的调参。
用错PID可能得情况是这样的:
ArduPilot H743 10inch PID for 5inch Mark4
“Alt + A” 弹出对话框进行step by step设置。
5寸机
3S电池
单组最高电压
单组最低电压
和9寸机默认4S做了个对比,参数不对,震动很厉害的。
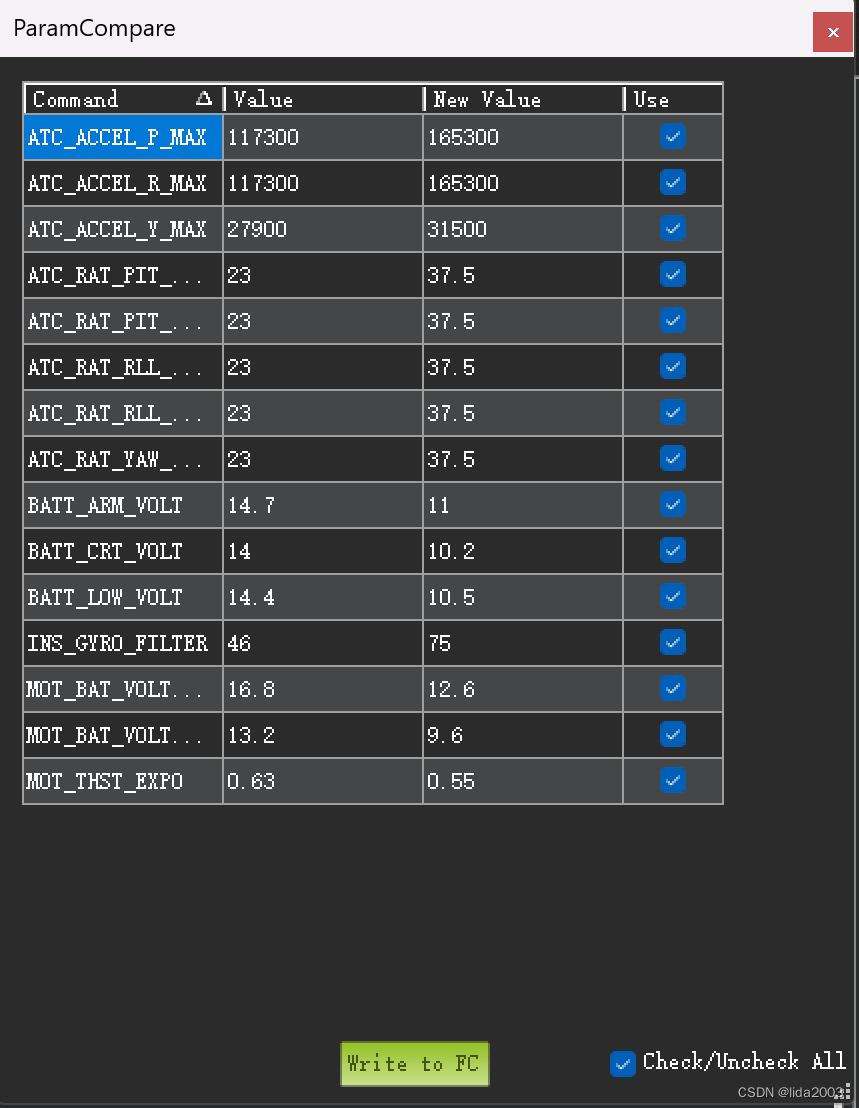
写入FC的Flash保存
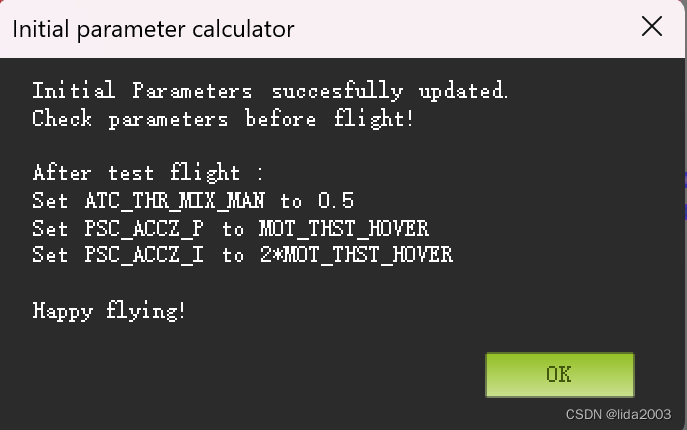
参考:
至于精调参数,那就“鱼有鱼路,虾有虾路”、“百花齐放,百家争鸣”,请各位高手大佬各自发挥吧。
参考资料:
Arducopter Tuning (AUTOTUNE, PIDs & FILTERS, FLIGHT TESTS!)
4. 总结
通过上面亲手解决问题,其实最为重要的一点,是建立了与开源社区的联系,以及问题解决的途径和方法。
当然,也加深了对特定硬件和问题的深入理解程度。
5. 参考资料
【1】ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配
【2】ArduPilot硬件AOCODARC H7DUAL配置文件讨论
【3】ArduPilot之MissionPlanner姿态显示界面异常
【4】ArduPilot开源飞控系统之简单介绍
【5】ArduPilot Firmware & Web Tools
6. 附录
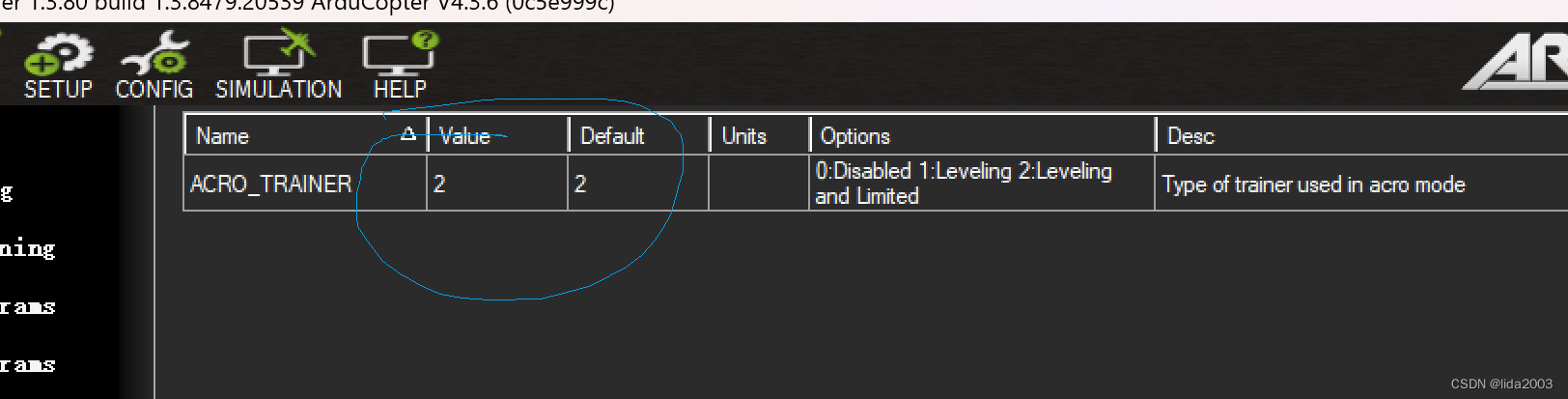
6.1 补充AcroTrainer视频
本来是想飞acro模式的,一个参数(ACRO_TRAINER )默认是2,就超级不爽了,很不习惯。
*注:要飞ArduPilot手动,需要设置ACRO_TRAINER = 0。 *
ArduPilot Mark4 H743 BIM270 Dual Acro Trainer
和这个割草飞完全不一样了吧,哈哈!!!
BetaFlight Mark4 + 城北公园 割草飞
6.2 补充Acro视频
配套参数:H743-BMI270Dual.zip
ArduPilot Mark4 H743 BIM270 Dual Acro御用飞场
细心的朋友可能会看到干扰比平时飞的时候多了不少,这里有几个问题:
- VTX功率只有400mW(以前BF都是600mW的)
- 台子都是管子搭起来的,可能有一些屏蔽影响
- 最重要的是,公园搞活动部署了一个移动基站
- 另外,带来一个GPS定位信号异常
我飞了4个电,也就8颗星。以前都是17 ~ 18颗星的。
并且飞控系统里面一直没有Lock到位置,所以posHold功能没法用。



6.3 补充机头指向行进方向
WP_YAW_BEHAVIOR = 1

6.4 补充电源相关FAILSAFE
请根据情况做出设置,通常来说可以都设置为0,去掉告警信息,但是飞手需要注意上述电池情况。
- 低电告警
BATT_LOW_TIMER
BATT_FS_LOW_ACT
BATT_LOW_VOLT
BATT_LOW_MAH


- 严重低电
BATT_FS_CRT_ACT
BATT_CRT_VOLT

6.5 Ardupilot后续固件更新

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 1
1 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)