
3D深度体感摄像头 自有算法的深度立体视觉传感器
rgbdsense基于结构光结合自有算法的深度立体视觉传感器,通过USB将深度数据与RGB数据传输至PC的免驱动设备。通过此次众筹为大家提供开放易用的3D深度摄像头,开发人员可借助PC用于3D成像,图像匹配。三维扫描,动感游戏,unity游戏机器人视觉等领域的研究与开发,我们提供开源的图像匹配算法、OPENNI接口数据、NEIT人体骨骼算法、unity游戏开发工具、三维扫描指导性开发文件。
rgbdsense基于结构光结合自有算法的深度立体视觉传感器,通过USB将深度数据与RGB数据传输至PC的免驱动设备。通过此次众筹为大家提供开放易用的3D深度摄像头,开发人员可借助PC用于3D成像,图像匹配。三维扫描,动感游戏,unity游戏机器人视觉等领域的研究与开发,我们提供开源的图像匹配算法、OPENNI接口数据、NEIT人体骨骼算法、unity游戏开发工具、三维扫描指导性开发文件。
设备外观
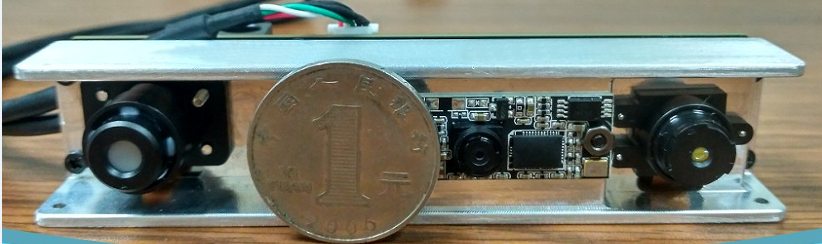
使用环境室内
设备参数
型号(model)RGBD600工作范围(cm)(Working Range)50 ~ 600深度精度(Depth Accuracy)1mm@1m模组尺寸(mm)(Size)105*35*22视场角FoVD=68.78° H=57.39° V=44.62°深度图分辨率(Depth Resolution)640x480@30Hz(USB2.0)RGB分辨率(RGB Resolution)1080P深度图输出时延(Depth Output Latency)17ms温度适应范围(Temperature)0°~50°操作系统(OS)Windows /LinuxSDKOpen NI/Self-SDK /Unity/NEIT输出接口(Output Interface)USB2.0
提供开放的三维深度图像的采集系统,帮助广大图像处理发烧有提供支持,对有志向从事图像匹配。三维扫描,动感游戏,unity游戏机器人视觉等QQ号码出售领域的爱好者 提供平台研究与开发,我们提供开源的图像匹配算法 OPENNI接口数据 NEIT人体骨骼算法,unity游戏开发工具,三维扫描指导性开发文件
我们提供:
图像匹配的开源程序
OPENNI接口数据
NEIT人体骨骼识别
unity游戏开发工具驱动对接
三维建模指导性开发文件
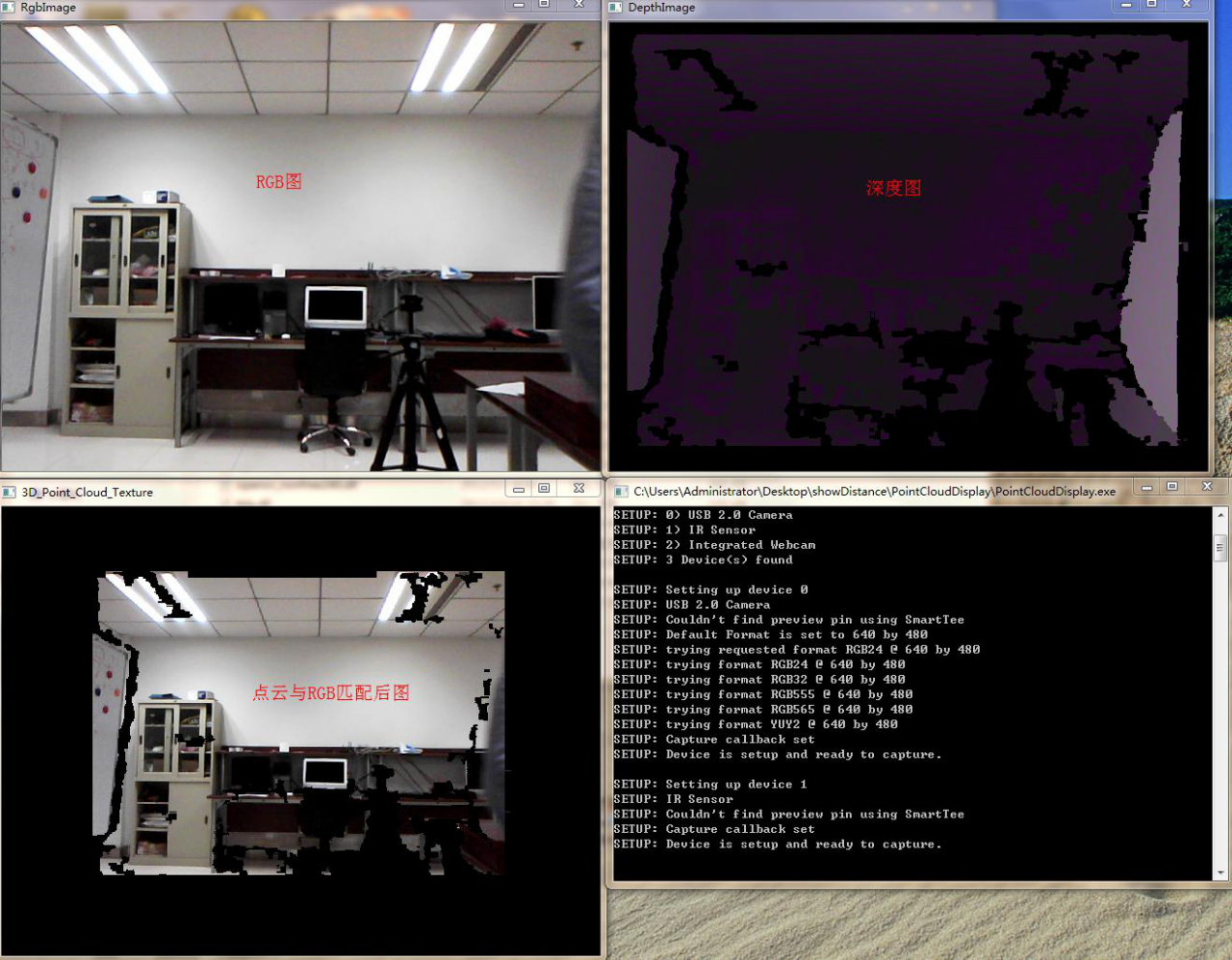
效果图
匹配效果

3D深度体感摄像头外更多的创客开发板,开发套件现在可以免费申请啦,只需要你关注云汉电子社区微信公众号ickeybbs,点击菜单栏“免费板卡”就可以免费申请啦!!

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)