
2022年度十大最佳SLAM开源算法盘点:慕尼黑工大DM-VIO
作者|小六 编辑| 计算机视觉life点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击进入→自动驾驶之心【SLAM】技术交流群后台回复【SLAM综述】获取视觉SLAM、激光SLAM、RGBD-SLAM等多篇综述!论文名:DM-VIO: Delayed Marginalization Visual-Inertial Odometry作者单位:慕尼黑工业大学Daniel ...
作者 | 小六 编辑 | 计算机视觉life
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【SLAM】技术交流群
后台回复【SLAM综述】获取视觉SLAM、激光SLAM、RGBD-SLAM等多篇综述!
论文名:
DM-VIO: Delayed Marginalization Visual-Inertial Odometry
作者单位:慕尼黑工业大学Daniel Cremers组
项目主页: http://vision.in.tum.de/dm-vio
论文:
https://vision.in.tum.de/_media/research/vslam/dm-vio/dm-vio.pdf
开源地址: https://github.com/lukasvst/dm-vio
录用:2022 Robotics and Automation Letters (RA-L)
DM-VIO是一种基于延迟边缘化和位姿图BA的单目视觉惯性里程计。该系统单目VIO超过了sota 方法,甚至在某些情况下超过了性能最好的双目VIO。
延迟边缘化是啥?先说说边缘化,它常用于保证系统更新时间,但边缘化后很难恢复,并且连接变量的线性化点不能修改。
延迟边缘化策略,弥补了边缘化的缺陷并保留了边缘化的优势。其思想是建立第二个因子图,该因子图的边缘化将会延迟,可以在之后通过访问延迟图,使用新的一致线性化点产生更新的边缘化。此外,延迟边缘化使我们能够将IMU的信息关联到已经被边缘化的状态,这是提出的位姿图BA的基础,可以用来进行IMU初始化。
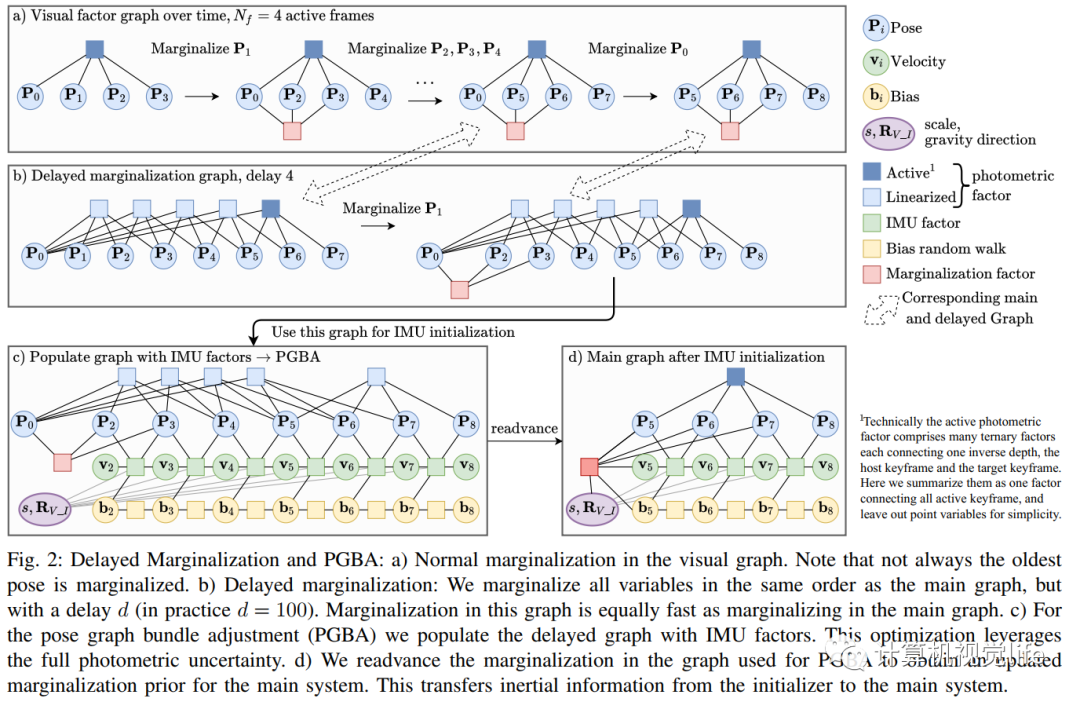
延迟边缘化和PGBA
DM-VIO 有啥用?
它采用了一种新的IMU初始化方法,在无人机、手持设备和汽车等场景都能良好的工作,扩展了单目方法的普适性。
延迟边缘化的思路可以用到很多场景,例如在边缘化设置中重新激活旧的关键帧以实现地图重用。
汽车恒速运动时,IMU无法很好的初始化恢复绝对尺度。本文方法可解决该问题,性能甚至优于sota 双目+IMU方法。
开源的代码易于扩展,因为所有优化都集成到GTSAM,可以快速添加新的因子,比如GPS,轮式里程计等
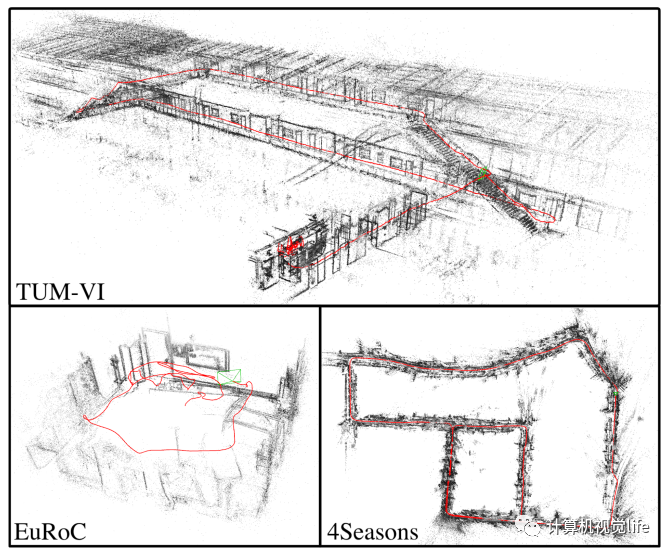
展示下效果
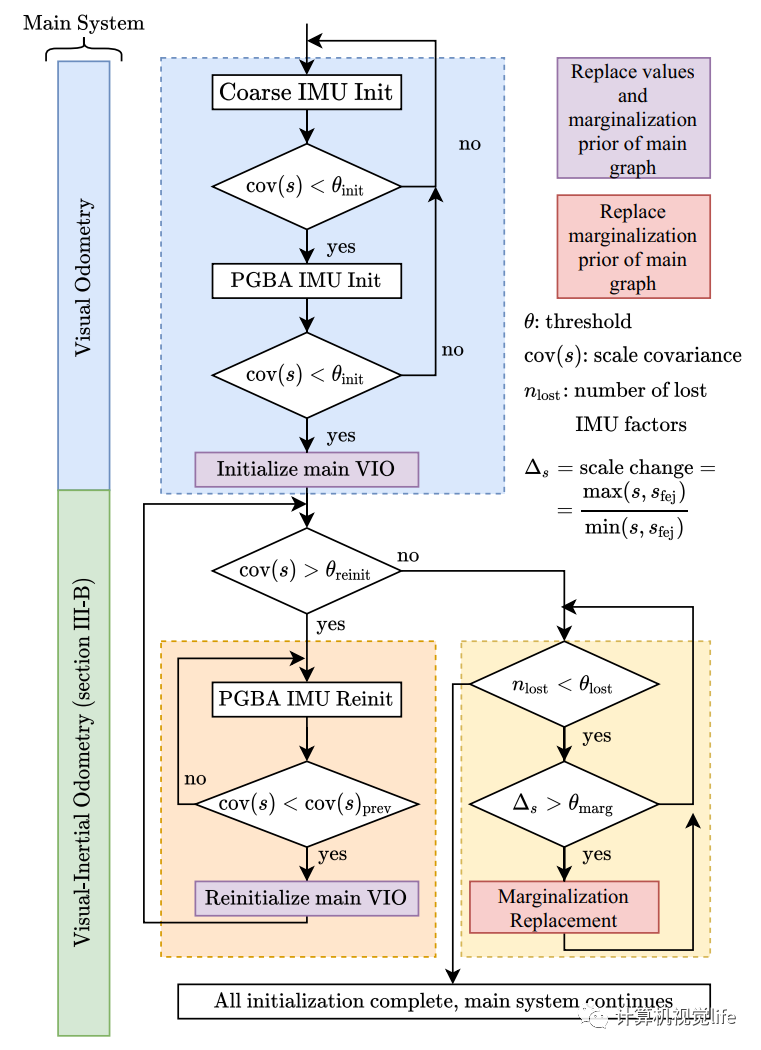
多级IMU初始化策略
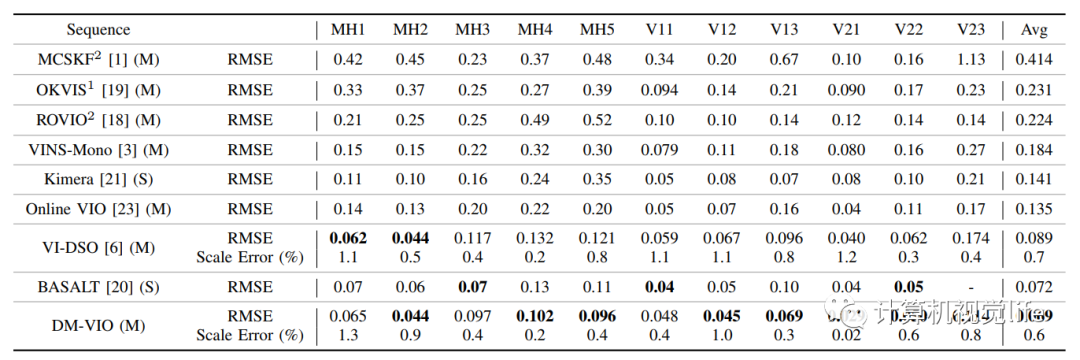
量化效果

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 0
0 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)