
建造属于你的无人驾驶车——(五)在RVIZ中显示XACRO模型
建造属于你的无人驾驶车!本专栏持续更新中…程序源码:https://github.com/kkmd66/ZZX_RUNSolidworks模型文件:https://github.com/kkmd66/ZZX_RUN/releases/tag/ZZX_RUN_Solidworks在RVIZ中显示XACRO模型创建XML文件源码位置:src/zzx_run_description/launch/dis
·
建造属于你的无人驾驶车!
本专栏持续更新中…
程序源码:https://github.com/kkmd66/ZZX_RUN
Solidworks模型文件:https://github.com/kkmd66/ZZX_RUN/releases
在RVIZ中显示XACRO模型
创建XML文件
源码位置:src/zzx_run_description/launch/display_xacro.launch
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find zzx_run_gazebo)/urdf/zzx_run_robot.urdf.xacro'" />
<arg name="gui" default="true" />
<param name="robot_description" command="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find zzx_run_description)/config/urdf.rviz" required="true" />
</launch>
添加RVIZ配置文件
源码位置:zzx_run_description/config/urdf.rviz
运行
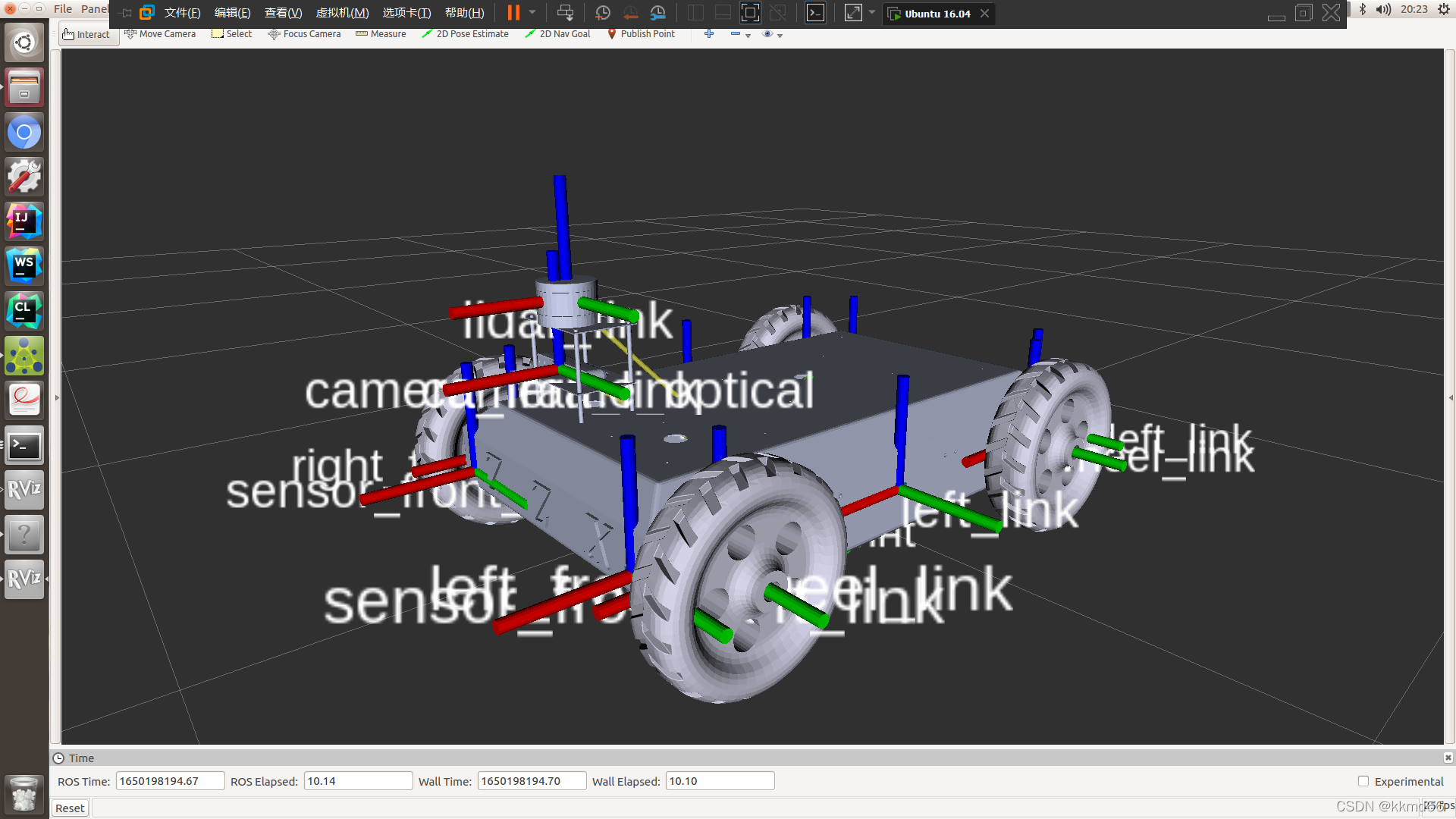
roslaunch zzx_run_description display_xacro.launch
效果:
最后:
有问题可以和我交流哦~


瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)