开源项目::移动机器人基础平台与上层算法
项目汇总
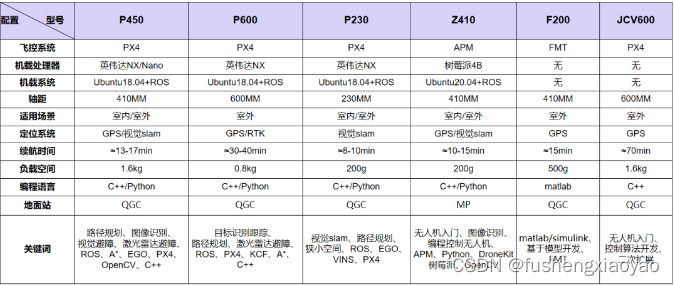
阿木实验室开源无人机开发平台:6款
■ Z410开源无人机开发平台:苍穹四轴DIY(苍穹的新一代即FMT)
■ F200基础无人机开发平台:FMT:C语言开发+simulink;基于RT-Thread的开源自驾仪分享
■ JCV600基础无人机开发平台

0.ROS;XTDrone
1.PX4
入门教程:
6-1:pix编译脚本分析与调试手段 - PX4固件二次开发初级课程 - AmovLab阿木社区--_哔哩哔哩_bilibili
2.基于RT_Thread.
苍穹-自动驾驶仪
GitHub - JcZou/StarryPilot: A lightweight autopilot software for Pixhawk
Firmament(FMT)开源自驾仪:基于RT-Thread的开源自驾仪分享

3.浙大高飞实验室
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab_哔哩哔哩_bilibili
4阿木实验室
Prometheus自主无人机开源项目:基于高飞的EGO_planing:
Github网址:https://github.com/amov-lab/Prometheus
Gitee网址:https://gitee.com/amovlab/Prometheus
使用手册(全新):https://wiki.amovlab.com/public/prometheus-wiki/
技术问答专区:https://bbs.amovlab.com/forum.php?mod=forumdisplay&fid=101&page=1
开源仿真镜像:下方菜单栏回复“Prometheus仿真镜像 ”即可获取。
Prometheus v1仿真镜像下载地址为(提取码为 amov ) :
v1版镜像链接:https://pan.baidu.com/s/1UCWAiTP2-ciZpZqsOCpJDA
Prometheus v2仿真镜像下载地址为(提取码为 amov ):
V2版镜像链接:https://pan.baidu.com/s/1TjSINS4L3HBd9Th4gqRGyw
Firmament(FMT)开源自驾仪:基于RT-Thread的开源自驾仪分享
Github网址:https://github.com/Firmament-Autopilot
使用手册:https://firmament-autopilot.github.io/FMT-DOCS/
https://firmament-autopilot.github.io/FMT-DOCS/#/content_ch/Document
FMT技术问答专区:https://bbs.amovlab.com/forum.php?mod=forumdisplay&fid=77
公开课:https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=70
KKSwarm | 基于强化学习的开源机器人集群项目,支持理论快速落地 (qq.com)
Github网址:
https://github.com/amov-lab/kk-robot-swarm
https://github.com/kkswarm/kk-robot-swarm
使用手册:https://wiki.amovlab.com/public/misaro-doc/
5、XTDrone

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)