
首个开源室外点云分割工具箱,多篇算法均已复现!(已开源)
作者|ADLab 编辑|OpenDataLab点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击进入→自动驾驶之心【语义分割】技术交流群后台回复【分割综述】获取语义分割、实例分割、全景分割、弱监督分割等超全学习资料!PCSeg高性能点云分割开源框架点云语义分割任务旨在将点云中的每个点分配类别甚至实例标签。然而,作为自动驾驶3D感知的关键任务之一,现有开源工具箱大多仅围...
作者 | ADLab 编辑 | OpenDataLab
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【语义分割】技术交流群
后台回复【分割综述】获取语义分割、实例分割、全景分割、弱监督分割等超全学习资料!

PCSeg高性能点云分割开源框架
点云语义分割任务旨在将点云中的每个点分配类别甚至实例标签。然而,作为自动驾驶3D感知的关键任务之一,现有开源工具箱大多仅围绕室内场景进行,缺乏对室外场景的支持。于是,上海人工智能实验室智能交通平台组(ADLab)发布PCSeg高性能点云分割开源框架,在Waymo Open Dataset和SemanticKITTI等公开数据集上支持了多种SOTA算法,并提供了强基线复现模型。
代码地址:https://github.com/PJLab-ADG/PCSeg
PCSeg专注于自动驾驶领域的室外点云分割,致力于推动三维场景理解及其相关领域的统一和繁荣。在PCSeg的帮助下,开发团队以追求公平、效率和性能的方式,在通用的大规模点云数据集上对各种方法进行基准(Benchmark)测试。



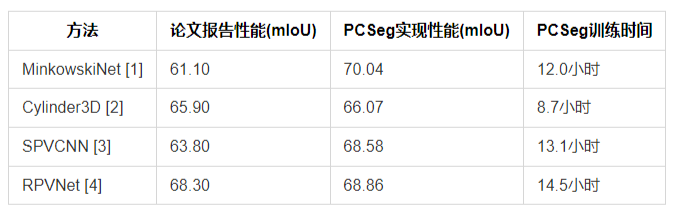
PCSeg在拥有较高训练速度及推断速度的同时,对几种SOTA算法的实现分割精度均超过了原论文报告的分割精度。目前,PCSeg支持MinkowskiNet、Cylinder3D、SPVCNN、RPVNet的高精度复现;并支持SemanticKITTI、ScribbleKITTI、Waymo Open Dataset在内的数据集,后续会提供对A2D2、nuScenes的支持;同时也会在近期更新Panoptic nuScenes、Panoptic SemanticKITTI、4D Panoptic SemanticKITTI等对全景分割任务的数据与方法支持。
下表为在几个SOTA方法在SemanticKITTI数据集上的PCSeg实现性能和原论文报告性能,可以看到,PCSeg实现的SPVCNN和MinkowskiNet相比原论文报告的性能具有显著优势。
PCSeg框架的深度学习逻辑由PyTorch实现,整体采用简洁易懂的模块化编程。在架构上部分参考了OpenPCDet框架[5],故而对熟悉点云领域的研究和工程人员比较友好。所有模型结构和超参数由Yaml文件控制,并为SemanticKITTI数据集上的几个代表性方法提供了预训练模型参数。

已支持的大规模点云数据集
● SemanticKITTI
下载地址:
https://opendatalab.com/SemanticKITTI
● ScribbleKITTI
下载地址:
https://github.com/ouenal/scribblekitti
● Waymo
下载地址:
https://opendatalab.com/Waymo
参考资料
[1] 4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks
[2] Cylindrical and Asymmetrical 3D Convolution Networks
for LiDAR Segmentation
[3] Searching Efficient 3D Architectures with Sparse Point-Voxel Convolution
[4] RPVNet: A Deep and Efficient Range-Point-Voxel Fusion Network for LiDAR Point Cloud Segmentation
[5] OpenPCDet Toolbox for LiDAR-based 3D Object Detection

国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 0
0 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)